Configuración de observadores de malla para el dispositivo: MRTK2
En esta guía se explica cómo configurar el observador de malla espacial integrado en MRTK que admite la plataforma Windows Mixed Reality (por ejemplo, HoloLens). La implementación predeterminada proporcionada por Mixed Reality Toolkit es la clase WindowsMixedRealitySpatialMeshObserver. Muchas de las propiedades de este artículo se aplican a otras implementaciones de Observer personalizadas.
Configuración del perfil
Los dos elementos siguientes deben definirse primero al configurar un perfil de observador de malla espacial para el sistema de reconocimiento espacial.
- Implementación del tipo de observador concreto
- lista de plataformas admitidas para ejecutar este observador
Nota
Todos los observadores deben extender la interfaz IMixedRealitySpatialAwarenessObserver .

Configuración general
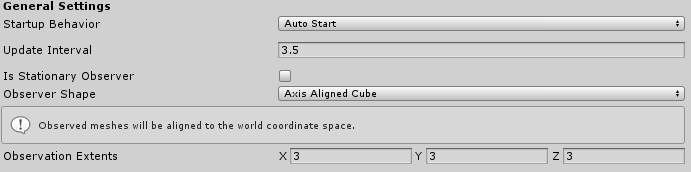
Comportamiento de inicio
El comportamiento de inicio especifica si el observador comenzará a ejecutarse cuando se cree una primera instancia. Las dos opciones son las siguientes:
- Inicio automático : el valor predeterminado en el que el observador comenzará la operación después de la inicialización.
- Inicio manual : el observador esperará a que se le indique que se inicie.
Si usa Inicio manual, se debe reanudar y suspender en tiempo de ejecución a través del código.
Intervalo de actualización
El tiempo, en segundos, entre las solicitudes a la plataforma para actualizar los datos de malla espacial. Los valores típicos se encuentran en el intervalo de 0,1 y 5,0 segundos.
Es observador estático
Indica si el observador debe permanecer estacionario o para moverse y actualizarlo con el usuario. Si es true, la forma del observador con el volumen definido por extensiones de observación permanecerá en el origen durante el inicio. Si es false, el espacio observer seguirá la cabeza del usuario como origen de la forma.
No habrá datos de malla calculados para cualquier área física fuera del espacio observador, tal como se define en estas propiedades: Is Stationary Observer, Observer Shape*, and Observation Extents.
Forma del observador
La forma del observador define el tipo de volumen que usará el observador de malla al observar mallas. Las opciones admitidas son:
- Cubo alineado con eje: forma rectangular que permanece alineada con los ejes del sistema de coordenadas del mundo, según se determina en el inicio de la aplicación.
- Cubo alineado por el usuario : forma rectangular que gira para alinearse con el sistema de coordenadas local de los usuarios.
- Esfera : un volumen esférico con un centro en el origen del espacio mundial. El valor X de la propiedad Extensiones de observación se usará como radio de la esfera.
Extensiones de observación
Las extensiones de observación definen la distancia desde el punto de observación que se observarán las mallas.
Configuración física

Capa física
La capa física en la que se colocarán los objetos de malla espacial para interactuar con los sistemas Unity Physics y RayCast.
Nota
Mixed Reality Toolkit reserva la capa 31 de forma predeterminada para su uso por parte de los observadores de reconocimiento espacial.
Recalcular los normales
Especifica si el observador de malla volverá a calcular los valores normales de la malla después de la observación. Esta configuración está disponible para asegurarse de que las aplicaciones reciben mallas que contienen datos normales válidos en plataformas que no las devuelven con mallas.
Configuración de nivel de detalle

Nivel de detalle
Especifica el nivel de detalle (LOD) de los datos de malla espacial. Los valores definidos actualmente son General, Fine y Custom.
General : coloca un impacto más pequeño en el rendimiento de la aplicación y es una excelente opción para la búsqueda de navegación/plano.
Configuración media - Equilibrada a menudo útil para experiencias que examinan continuamente el entorno para características grandes, pisos y paredes, así como detalles de oclusión.
Fine : generalmente exactamente un mayor impacto en el rendimiento de la aplicación y es una excelente opción para las mallas de oclusión.
Personalizado : requiere que la aplicación especifique la propiedad Triangles /Cubic Meter y permita a las aplicaciones ajustar la precisión frente al impacto en el rendimiento del observador de malla espacial.
Nota
No se garantiza que todas las plataformas respetan todos los valores triángulos o medidores cúbicos . La experimentación y la generación de perfiles se recomienda encarecidamente cuando se usa un LOD personalizado.
Triángulos por medidor cúbico
Válido cuando se usa el valor Personalizado para la propiedad Level of Detail y especifica la densidad del triángulo para la malla espacial.
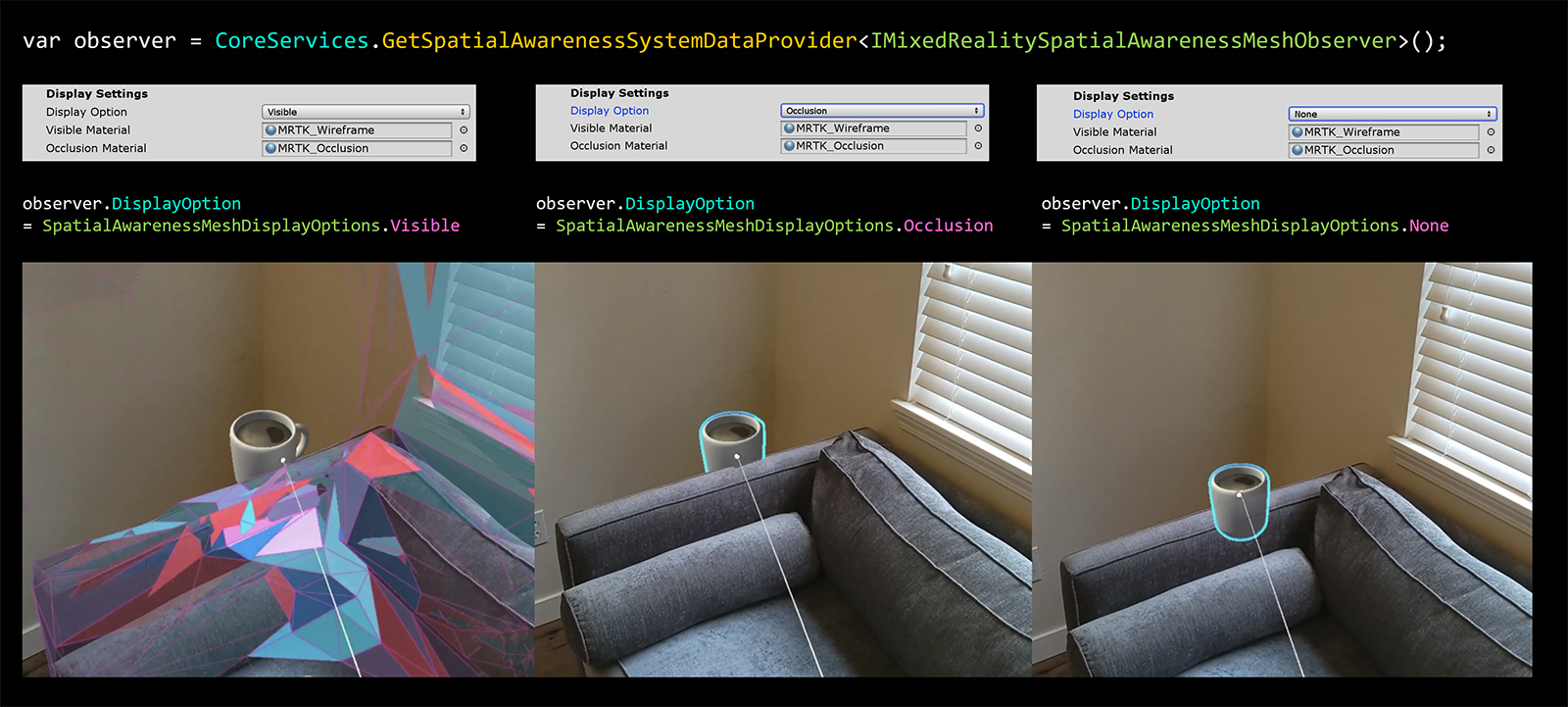
Configuración de pantalla

Opción de visualización
Especifica cómo el observador mostrará las mallas espaciales. Los valores admitidos son:
- Ninguno : el observador no representará la malla.
- Visible : los datos de malla estarán visibles mediante el material visible
- Oclusión : los datos de malla serán elementos ocluydos en la escena mediante el material de oclusión
Los observadores espaciales se pueden reanudar o suspender en tiempo de ejecución a través del código.
Advertencia
Si se establece la opción mostrar en Ninguno, no se impide que el observador se ejecute. Si desea detener a todos los observadores, las aplicaciones deberán suspender todos los observadores a través de CoreServices.SpatialAwareness.SuspendObservers()
Visible Material
Indica el material que se va a usar al visualizar la malla espacial.
Material de oclusión
Indica el material que se va a usar para hacer que la malla espacial oclua hologramas.