品質基本概念是一種HoloLens 2應用程式,示範建置絕佳混合實境體驗的基本概念。 我們現在可以先透過選取應用程式中提供的選項,來體驗常見的環境、設計和效能問題和解決方案,而不只是學習和閱讀混合實境中的品質問題。
若要下載並安裝應用程式,請移至應用程式下載頁面:
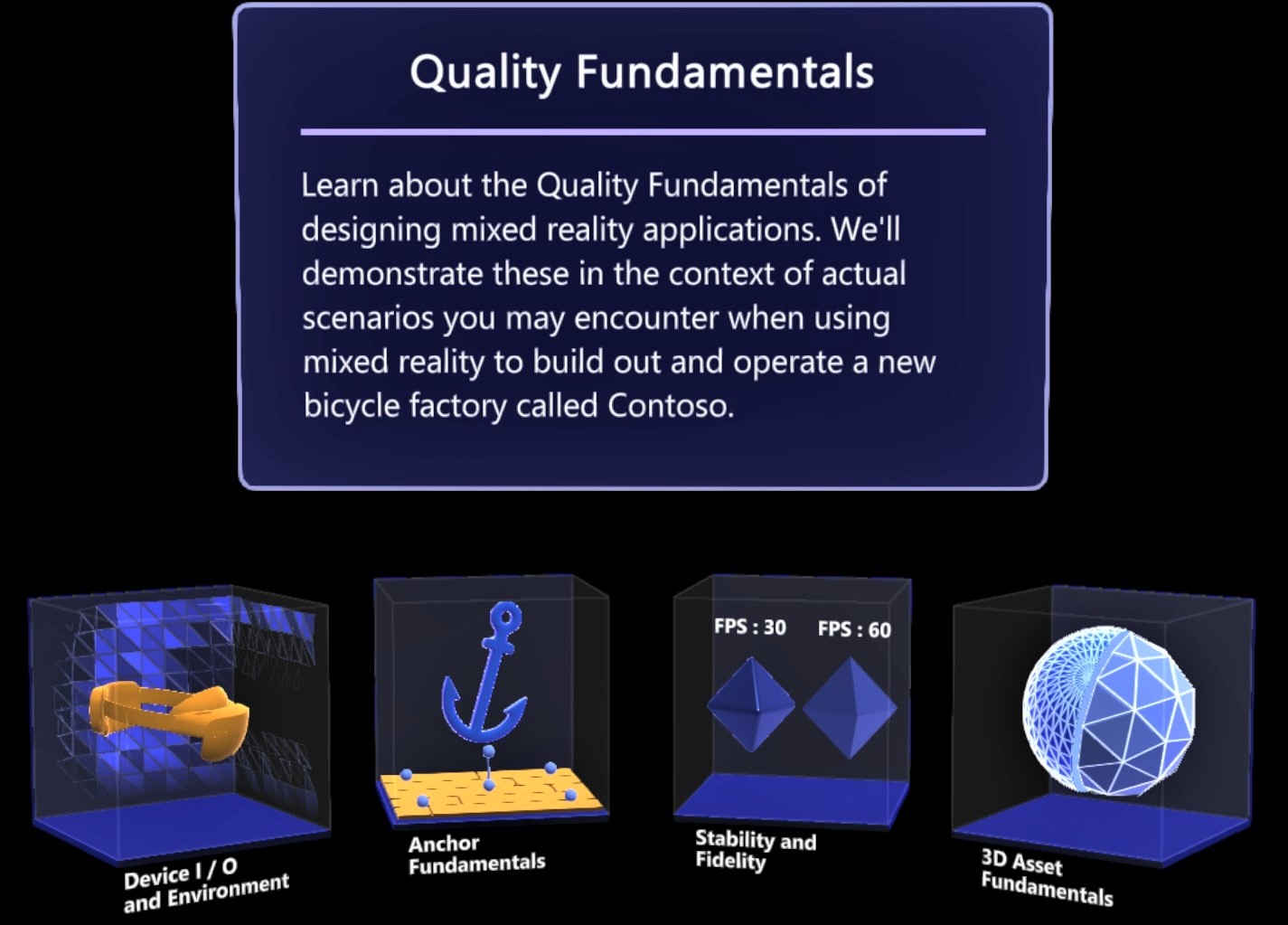
在此範例應用程式中,我們將瞭解:
- 裝置 I/O 和環境:環境因素如何影響 HoloLens 的效能。
- 空間錨點:如何使用空間錨點將全像投影對齊實體空間。
- 全像攝影穩定性和逼真度:探索技術可協助改善全像投影的穩定性和逼真度。
- 3D 資產基本概念:如何優化 3D 資產,以維持高視覺逼真度。
裝置 I/O 和環境
在 HoloLens 上啟動品質基本概念應用程式。 應用程式首頁出現之後,請選取 [裝置 I/O 和環境]。 我們將探索 HoloLens 感應器和周圍環境如何影響空間對應、追蹤和全像投影的位置。
Surfaces
具有鏡像完成的鏡像或表面可能會混淆 HoloLens 感應器與物件的形狀。 反映于表面的物件可能會由裝置解譯為變更環境,這可能會導致裝置失去追蹤。 如果鏡像表面造成 HoloLens 的挑戰,請考慮新增螢幕或可封閉的盲目。
如需詳細資訊,請參閱HoloLens 環境中空間中的表面考慮。
光源
HoloLens 效能可能會受到非常低或非常亮的光線條件的影響。 HoloLens 上的追蹤感應器需要大約 500-1000 lux 的光線才能以最佳方式運作。 您可以使用 luxmeter 或行動裝置應用程式來測量空間中的光線量。
如需詳細資訊,請參閱HoloLens 環境中的光源考慮。
錨點基本概念
若要探索如何使用 Spatial Anchors 將全像投影對齊實體空間,請在應用程式的首頁上選取 [錨點資金 ]。
在此應用程式的這個部分中,我們將探索下列使用者案例:
- 當沒有錨點套用至物件時,會發生什麼事。
- 當多個 Spatial Anchors 用於物件群組時。
- 使用 QR 代碼在多個共同作業者之間共用 Spatial Anchor。
- 空間中非常大型物件的錨定位置。
如需詳細資訊,請參閱Mixed Reality檔中的空間錨點。
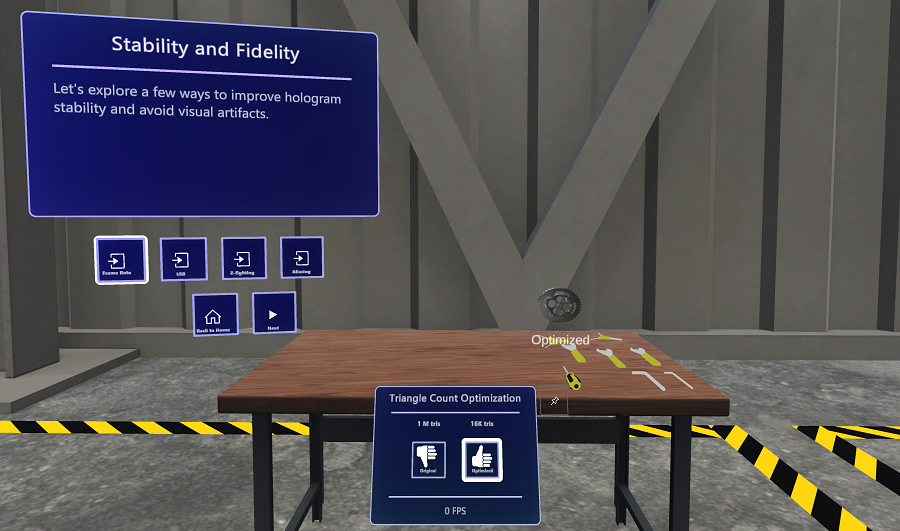
穩定性和逼真度
在應用程式的首頁上,選取 [ 穩定性] 和 [精確度 ],以探索如何改善全像投影穩定性。
我們將探索下列重要概念:
畫面播放速率
為了提供最佳的全像投影體驗,應用程式開發人員必須維持每秒 60 個畫面格, (FPS) 。 在應用程式的這個部分中,切換不同的三角形計數選項,以體驗各種畫面播放速率的差異。
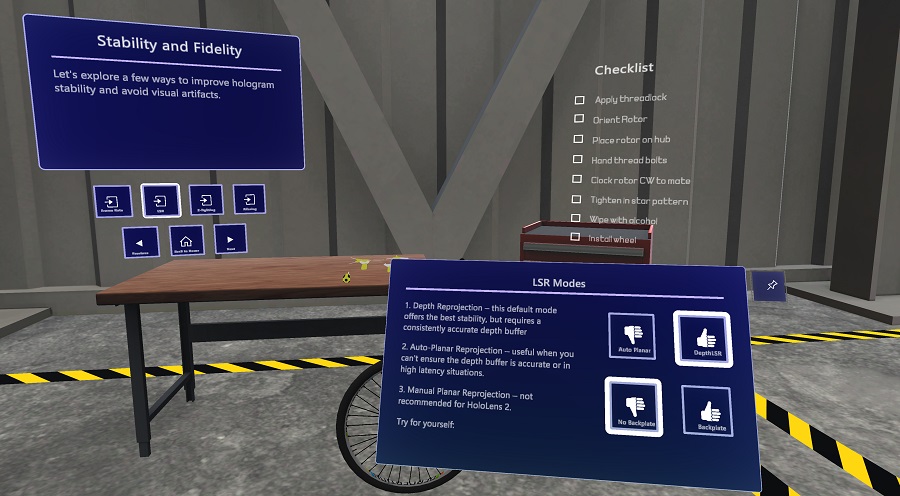
延遲階段重新產生 (LSR)
重新投影是用來穩定全像投影,當使用者移動其空間時。 試用應用程式這個部分所提供的不同重現選項,以查看全像投影品質的差異。
Z-fighting
當混合實境應用程式無法辨識哪一個物件位於另一個物件前面時,就會發生 Z 衝突。 您會注意到全像攝影物件的閃爍,因為它們會針對相同的 Z 深度值進行對抗。 藉由變更全像攝影物件的位置,在此案例中,體驗應用程式中 z 對抗的效果。

如需 z-fighting 的詳細資訊,請參閱Unity 的建議設定中的啟用深度緩衝區共用一文。
反別名
反鋸齒是一種技術,可用來在全像投影中的弧形線條和對角線上平滑邊緣。 在應用程式的這個部分中,體驗顯示文字和自行車輪輻上別名的影響。
3D 資產基本概念
在應用程式的首頁上,選取 [3D 資產基本概 念] 以探索如何將 3D 資產優化以符合畫面播放速率需求,同時維持高視覺逼真度。
我們將探索下列重要概念:
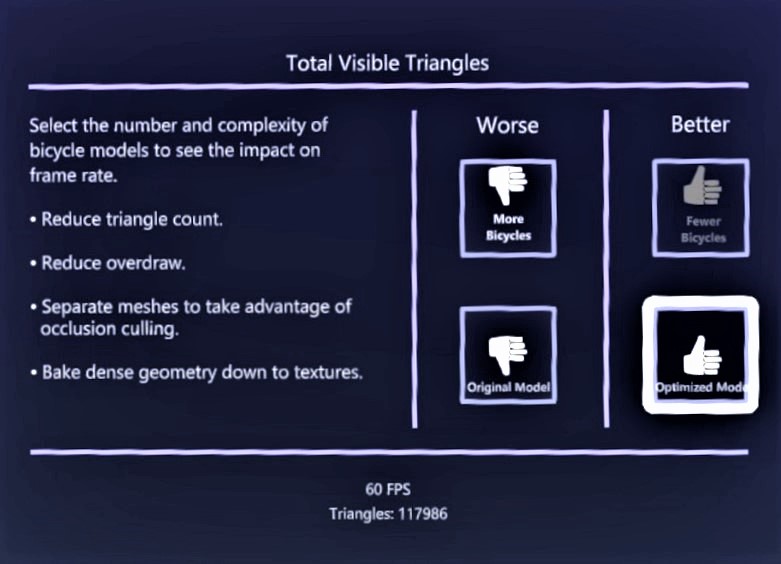
三角形計數
選取自行車模型的數目和複雜度,以根據 FPS 體驗視覺差異。
如需詳細資訊,請參閱 資產建立程式。
著色器傳遞
選取自行車數目和不同的著色器選項,以根據 FPS 體驗視覺差異。
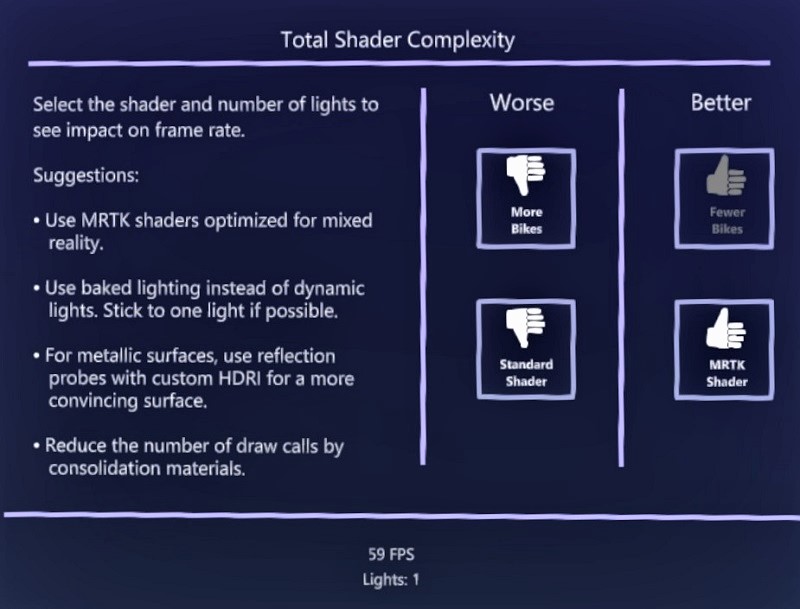
如需詳細資訊,請參閱 MRTK 標準著色器。
繪製呼叫
繪製呼叫是圖形卡的資源密集呼叫。 在應用程式的這個部分中,第一手體驗視覺差異,因為繪製呼叫數目會影響 FPS。
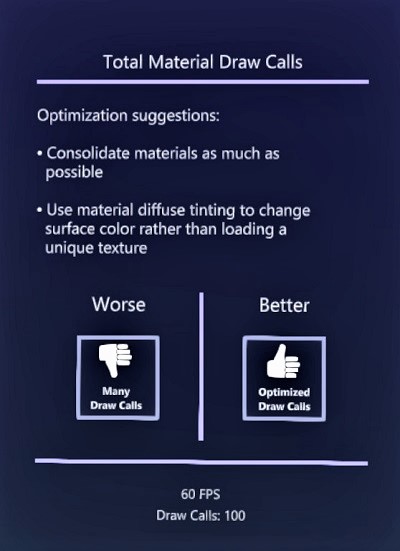
請參閱 CPU 到 GPU 效能建議。
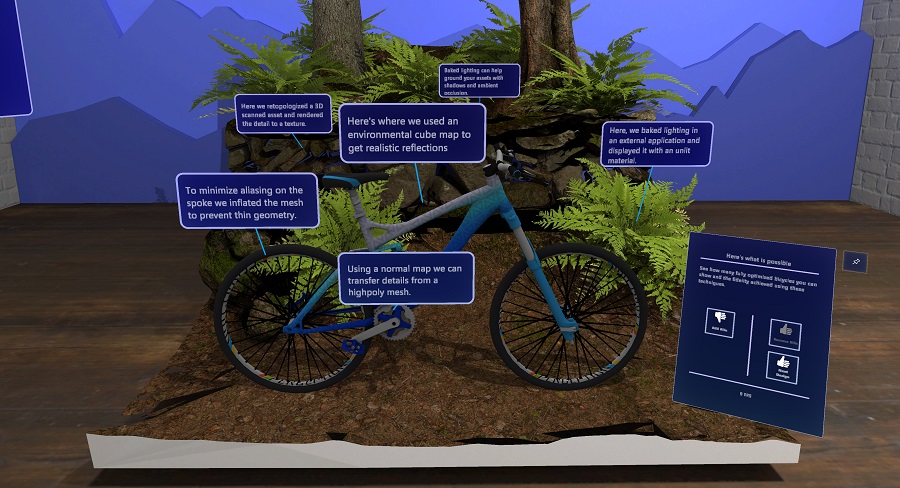
結局
在這裡,我們可以探索可顯示多少完整優化自行車,以及優化技術可能的精確度層級。
下一步
探索其他混合實境範例案例: