規劃求解概觀 - MRTK2
解算器是一些元件,可協助根據預先定義的演演算法計算物件的位置 & 方向。 例如,將物件放在使用者目前注視光線傳播點擊的表面上。
此外,規劃求解系統會決定性地定義這些轉換計算的作業順序,因為沒有可靠的方法可指定給 Unity 元件的更新順序。
解算器提供一系列的行為,以將物件附加至其他物件或系統。 另一個範例是標記物件,該對象會根據相機) 將滑鼠停留在使用者 (前。 規劃求解也可以附加至控制器和 物件,讓對象標記沿著控制器。 所有解算器都可以安全地堆疊,例如卷標行為 + 表面磁力 + 動量。
如何使用規劃求解
規劃求解系統包含三種文稿類別:
Solver:所有解算器衍生自的基底抽象類。 它提供狀態追蹤、平滑參數和實作、自動規劃求解系統整合,以及更新順序。SolverHandler:設定參照對象來追蹤 (例如:主要相機轉換、手部光線等 ) 、處理規劃求解元件的收集,並依適當順序執行更新它們。
第三個類別是求解器本身。 下列解算器提供基本行為的建置組塊:
Orbital:鎖定所參考物件的指定位置和位移。ConstantViewSize:縮放以維護相對於參考物件的檢視的常數大小。RadialView:將物件保留在參考物件所轉換的檢視圓錐內。Follow:將 物件保留在參考物件的一組使用者定義界限內。InBetween:將物件保留在兩個追蹤的對象之間。SurfaceMagnetism:將光線轉換成世界表面,並將對象對齊該表面。DirectionalIndicator:決定物件的位置和方向做為方向指標。 從 SolverHandler Tracked Target 的參考點,此指標會導向所提供的 DirectionalTarget。Momentum:套用加速/速度/摩擦,以模擬由其他求解器/元件移動之對象的動量和彈性。HandConstraint:限制物件在不會與 GameObject 與手部交集的區域中追蹤手部。 適用於手部限制的互動式內容,例如功能表等。此規劃求解旨在與 IMixedRealityHand 搭配運作,但也適用於 IMixedRealityController。HandConstraintPalmUp:衍生自 HandConstraint,但包含邏輯,以測試手掌是否在啟用前面向使用者。 此規劃求解僅適用於 IMixedRealityHand 控制器,而其他控制器類型,此規劃求解的行為就像其基類一樣。
若要使用規劃求解系統,只要將上述其中一個元件新增至 GameObject 即可。 由於所有解算器都需要 SolverHandler,因此 Unity 會自動建立一個。
注意
您可以在 SolverExamples.scene 檔案中找到如何使用解算器系統的範例。
如何變更追蹤參考
元件的 [追蹤目標類型] 屬性 SolverHandler 會定義所有解算器將用來計算其演算法的參考點。 例如,具有簡單SurfaceMagnetism元件的 實值類型Head會產生來自頭部的光線廣播,以及使用者注視的方向,以解決所點擊的表面。 屬性的 TrackedTargetType 可能值為:
- 前端 :參考點是主相機的轉換
- ControllerRay:參照
LinePointer點是控制器上的轉換 (,也就是動作控制器上的指標原點或手部控制器) 指向線條光線的方向TrackedHandedness使用 屬性來選取手部喜好設定 (,例如 Left、Right、Both)
- HandJoint:參考點是特定手部接合的轉換
TrackedHandedness使用 屬性來選取手部喜好設定 (,例如 Left、Right、Both)TrackedHandJoint使用屬性來判斷要使用的聯合轉換
- CustomOverride:從指派的參考點
TransformOverride
注意
針對 ControllerRay 和 HandJoint 類型,規劃求解處理程式會先嘗試提供左控制器/手轉換,如果前者無法使用,則為右側,除非 TrackedHandedness 屬性另有指定。
與每個 TrackedTargetType 相關聯的各種屬性 範例
範例
重要
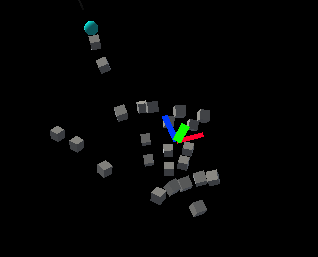
大部分的解算器會使用 所 SolverHandler提供之追蹤轉換目標的正向向量。 使用 手部聯合 追蹤的目標類型時,手部聯合的正向向量可能會指向手指,而不是透過手掌。 這取決於提供手部聯合數據的平臺。 針對輸入模擬和 Windows Mixed Reality,它是向上指向手掌 (的向上向量,也就是綠色向量向上,藍色向量是向前向量) 。
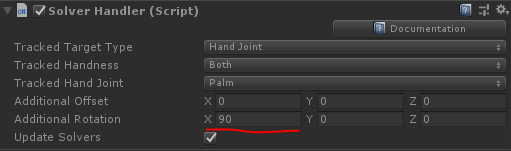
若要克服這個問題,請將 上的 SolverHandler[其他旋轉] 屬性更新為<90、0、0>。 這可確保提供給解算器的正向向量會指向手掌,向外向手。
或者,使用 控制器 Ray 追蹤的目標類型來取得類似行為來指向手部。
如何鏈結求解器
可以將多個 Solver 元件新增至相同的 GameObject,進而鏈結其演算法。 元件 SolverHandler 會處理更新相同 GameObject 上的所有解算器。 根據預設, SolverHandler Start 上的呼叫 GetComponents<Solver>() 會依照求解器出現在偵測器中的順序傳回。
此外,將 [已更新的鏈接轉換 ] 屬性設定為 true 會指示 Solver 將計算位置、方向、& 小數位數儲存到所有求解器可存取的中繼變數 (,也就是 GoalPosition) 。 若為 false,則會 Solver 直接更新 GameObject 的轉換。 藉由將轉換屬性儲存到媒介位置,其他求解器就能夠從中繼變數開始執行其計算。 這是因為 Unity 不允許更新 gameObject.transform,以堆疊在相同的框架內。
注意
開發人員可以直接設定 SolverHandler.Solvers 屬性來修改解算器的執行順序。
如何建立新的規劃求解器
所有解算器都必須繼承自抽象基類 。 Solver 規劃求解延伸模組的主要需求牽涉到 SolverUpdate 覆寫 方法。 在此方法中,開發人員應該將繼承 GoalPosition的、 GoalRotation 和 GoalScale 屬性更新為所需的值。 此外,運用作為取用者所需的參考框架通常很重要 SolverHandler.TransformTarget 。
下列程式代碼提供名為 的新規劃求解元件範例,將 InFront 附加物件 2m 放在 前面 SolverHandler.TransformTarget。 SolverHandler.TrackedTargetType如果 由取用者設定為 Head,則 SolverHandler.TransformTarget 會是相機轉換,因此此規劃求解會將附加的 GameObject 2m 放在使用者注視的每個畫面前面。
/// <summary>
/// InFront solver positions an object 2m in front of the tracked transform target
/// </summary>
public class InFront : Solver
{
...
public override void SolverUpdate()
{
if (SolverHandler != null && SolverHandler.TransformTarget != null)
{
var target = SolverHandler.TransformTarget;
GoalPosition = target.position + target.forward * 2.0f;
}
}
}
規劃求解實作指南
常見的規劃求解屬性
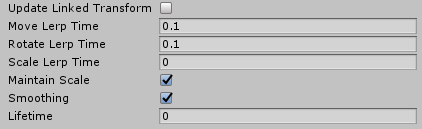
每個規劃求解元件都有一組相同的屬性,可控制核心規劃求解行為。
如果已啟用 Smoothing ,則規劃求解會隨著時間逐漸更新 GameObject 的轉換至計算值。 這項變更的速度取決於每個轉換元件的 LerpTime 屬性。 例如,較高的 MoveLerpTime 值會導致畫面之間的移動速度變慢。
如果已啟用 MaintainScale ,則規劃求解會利用GameObject的預設本機小數字數。
所有規劃求解元件繼承的通用屬性
軌道
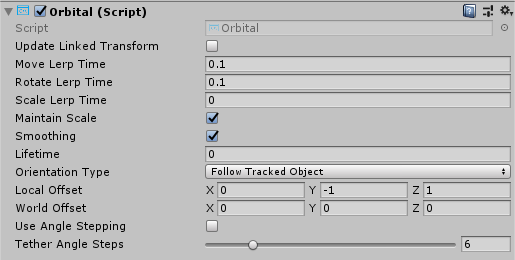
類別 Orbital 是沿著卷標的元件,其行為類似於太陽能系統中的行星。 此規劃求解可確保附加的 GameObject 繞著追蹤轉換的軌道。 因此,如果的 SolverHandler[追蹤目標類型] 設定為 Head,則 GameObject 會繞著套用固定位移的用戶頭部。
開發人員可以修改這個固定位移,將功能表或其他場景元件保留在眼部層級或用戶周圍的其他場景元件。 這是藉由修改 Local Offset 和 World Offset 屬性來完成。 Orientation Type 屬性會決定套用至物件的旋轉,如果它應該維持其原始旋轉,或一律面對相機或面對任何轉換正在驅動其位置等等。
Orbital 範例
RadialView
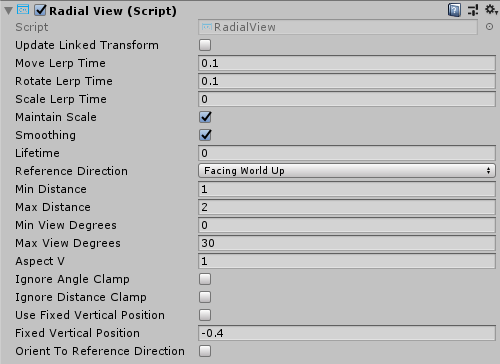
RadialView是另一個標記元件,會在用戶檢視的 frustum 內保留 GameObject 的特定部分。
Min & Max View Degrees 屬性會決定 GameObject 部分的大小一律在檢視中。
Min & 距離上限屬性會決定 GameObject 應該與使用者保持距離的程度。 例如,使用 最小距離 1m 的 GameObject 往前走,將 GameObject 推開,以確保它永遠不會比使用者更接近 1m。
一般而言,RadialView會與設定Head為 的追蹤目標類型搭配使用,讓元件遵循使用者的注視。 不過,此元件可以運作,以保留在任何追蹤目標類型的「檢視」中。
RadialView 範例
追隨
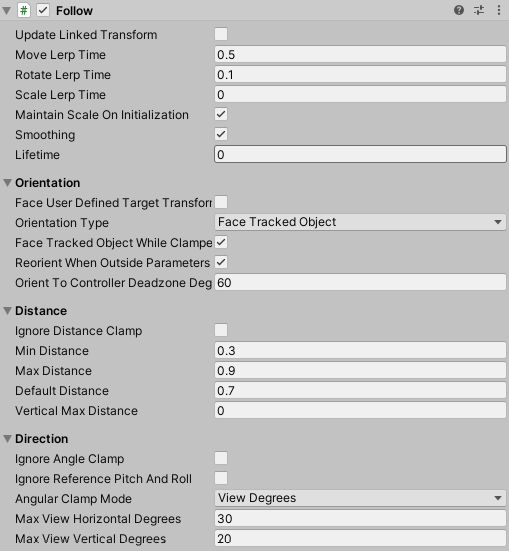
類別 Follow 會將專案放置在追蹤目標相對於其本機正向軸的 前面。 元素可以鬆散限制 (a.k.a.標籤) ,以便在追蹤的目標移至超出使用者定義的界限之前,不會追蹤它。
它的運作方式與RadialView規劃求解類似,具有其他控件來管理 最大水準 & 垂直檢視度,以及改變物件 方向 的機制。
追蹤屬性

遵循範例場景 (資產/MRTK/Examples/Demos/Solvers/Scenes/FollowSolverExample.unity)
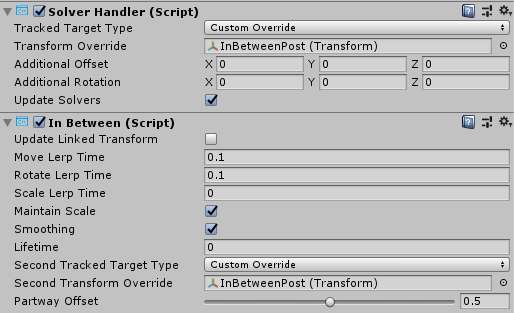
InBetween
類別 InBetween 會在兩個轉換之間保留附加的 GameObject。 這兩個轉換端點是由 GameObject 自己的 SolverHandler[追蹤目標類型 ] 和 InBetween 元件的 [第二個追蹤目標類型 ] 屬性所定義。 一般而言,這兩種類型都會設定為 CustomOverride ,並將產生的 SolverHandler.TransformOverride 和 InBetween.SecondTransformOverride 值設定為兩個追蹤的端點。
在運行時間,InBetween元件會根據第二個追蹤的目標類型和第二個轉換覆寫屬性建立另一個SolverHandler元件。
定義 PartwayOffset 物件在兩個轉換之間的行之間,應該將 0.5 放在半角、第一次轉換時為 1.0,而第二個轉換則為 0.0。
使用 InBetween 規劃求解在兩個轉換之間保留物件的範例
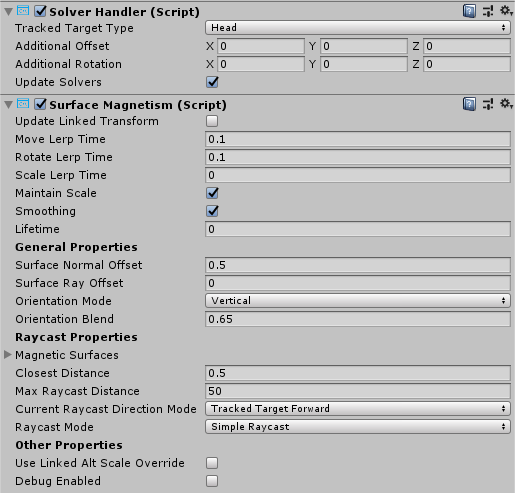
SurfaceMagnetism
的運作 SurfaceMagnetism 方式是針對一組表面的 LayerMask 執行光線傳播,並將 GameObject 放在該接觸點。
Surface 標準位移會將 GameObject 設定的距離放在距離表面的距離,距離表面的正常方向位於表面的命中點。
相反地, Surface Ray Offset 會將 GameObject 設定距離放在離表面遠的公尺,但相對於所執行光線傳播的方向。 因此,如果 raycast 是使用者的注視,GameObject 就會從表面的點擊點往相機更接近線條。
方向模式會決定要套用相對於介面上常態的旋轉類型。
- 無 - 未套用旋轉
- TrackedTarget - 物件將面對驅動光線廣播的追蹤轉換
- SurfaceNormal - 對象會根據介面上的點擊點正常對齊
- Blended - 對象會根據表面的點擊點正常對齊,並根據追蹤的轉換對向。
若要強制相關聯的 GameObject 以 None 以外的任何模式保持垂直,請啟用 [保留方向垂直]。
注意
當方向模式設定為 Blended 時,使用 Orientation Blend 屬性來控制旋轉因數之間的平衡。 0.0 的值會以 TrackedTarget 模式完全導向方向,而 1.0 的值則完全由 SurfaceNormal 驅動方向。
判斷可叫用哪些表面
將元件新增 SurfaceMagnetism 至 GameObject 時,如果有任何碰撞器,請務必考慮 GameObject 及其子系的圖層。 此元件的運作方式是執行各種類型的光線傳播,以判斷要「磁力」本身的介面。 如果規劃求解 GameObject 在 屬性SurfaceMagnetism所列MagneticSurfaces的其中一個圖層上有一個碰撞器,則光線傳播可能會自行點擊,導致 GameObject 附加至自己的碰撞器點。 您可以將主要 GameObject 和所有子系設定為 Ignore Raycast 圖層或修改 MagneticSurfaces LayerMask 陣列,以避免這種奇數行為。
相反地, SurfaceMagnetism GameObject 不會與屬性中 MagneticSurfaces 未列出的圖層表面衝突。 通常建議您將所有所需的表面放在專用層 (,也就是 Surfaces) ,並將 屬性設定 MagneticSurfaces 為僅此圖層。 使用 預設 或 所有專案 可能會導致UI元件或數據指標造成求解器。
最後,光線傳播將會忽略比屬性設定更 MaxRaycastDistance 遠的 SurfaceMagnetism 表面。
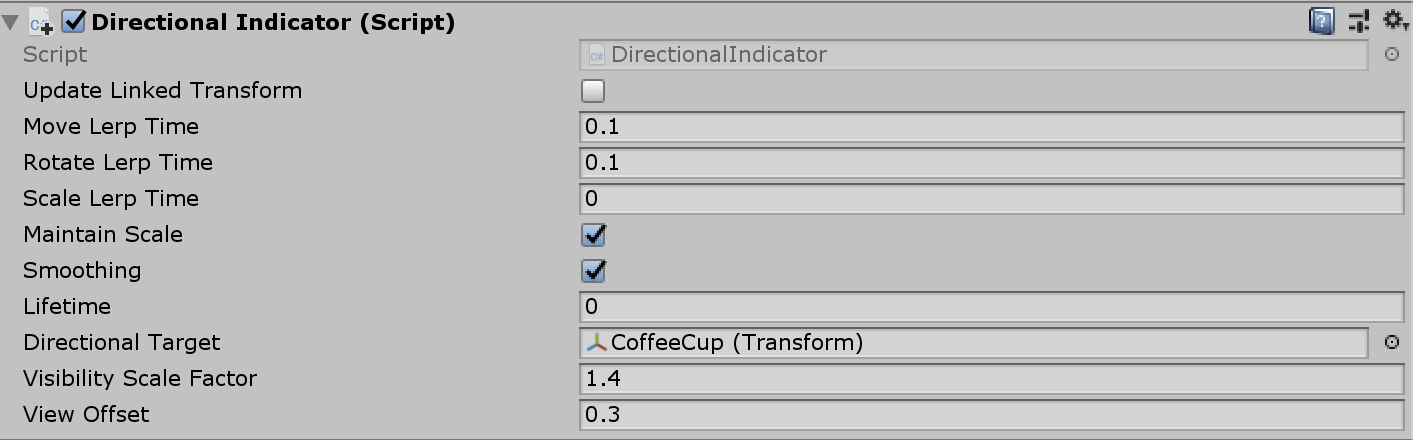
DirectionalIndicator
類別 DirectionalIndicator 是標記元件,會將本身導向至所需空間點的方向。
當的SolverHandler追蹤目標類型設定為 Head時,最常使用。 如此一來,具有規劃求解的 DirectionalIndicator UX元件會引導使用者查看所需的空間點。
所需的空間點是透過 方向目標 屬性來決定。
如果用戶可檢視方向目標,或 中 SolverHandler設定的任何參考框架,則此規劃求解會停用其下的所有 Renderer 元件。 如果無法檢視,則會在指標上啟用所有專案。
指標的大小會縮小使用者越接近,就是在其FOV中擷取 方向目標 。
最小指標小數位數 - 指針對象的最小小數字數
最大指標小數位數 - 指針對象的最大小數字數
可見度縮放因數 - 乘數以增加或減少FOV,以判斷 方向目標 點是否可檢視
檢視位移 - 從參照框架的觀點 (例如相機可能) ,此屬性會定義對象應該從檢視區中央到指標方向的距離。
方向指示器屬性
方向指標範例場景 (資產/MRTK/Examples/Demos/Solvers/Scenes/DirectionalIndicatorSolverExample.unity)
具有 HandConstraint 和 HandConstraintPalmUp 的手部功能表
此 HandConstraint 行為提供規劃求解,可將追蹤的物件限制在手部限制內容的區域安全 (,例如手部 UI、功能表等) 。 安全區域會被視為不會與手部交集的區域。 也包含名為 HandConstraintPalmUp 的HandConstraint衍生類別,以示範在手掌面向使用者時啟用規劃求解追蹤對象的常見行為。
如需使用手部條件約束規劃求解來建立手部功能表的範例,請參閱 [手部功能表] 頁面。
另請參閱
- Hand Tracking (手部追蹤)
- 目光