Hinweis
Für den Zugriff auf diese Seite ist eine Autorisierung erforderlich. Sie können versuchen, sich anzumelden oder das Verzeichnis zu wechseln.
Für den Zugriff auf diese Seite ist eine Autorisierung erforderlich. Sie können versuchen, das Verzeichnis zu wechseln.
In diesem Thema finden Sie detaillierte Anweisungen und Verfahren zum Messen der Touch Panning-Latenz (Verzögerung beim Verschieben per Touchscreen) gemäß der Hardwarezertifizierung für Windows 8.1 sowie zum Vorbereiten dieser Messungen. Es wird davon ausgegangen, dass Leser mit Touchscreens vertraut sind, das Konzept der Touchscreen-Latenz verstehen und grundlegendes Kenntnisse über Elektronik- und Softwareentwicklung haben.
Übersicht
Latenz ist das Ausmaß der im Touch Digitizer-System auftretenden zeitlichen Verzögerung. Touchdown-Latenz ist die Zeit zwischen dem Berühren des Bildschirms durch einen Finger oder Stift (Betätiger) und dem Zeitpunkt, an dem das Hostbetriebssystem den Kontakt empfängt (normalerweise über einen HID-Bericht). Die Panning-Latenz ist etwas komplizierter, da der Kontakt entlang eines kontinuierlichen Pfads bewegt wird, aber die entsprechenden Berichte in einzelnen Zeitintervallen ankommen. Daher wird die Panning-Latenz nur anhand einzelner Zeitintervalle definiert, für die gemeldete Touchdaten verfügbar sind. Das Messen der Panning-Latenz beschränkt sich darauf, die Zeitverzögerung zwischen dem Zeitpunkt der tatsächlichen Berührung und dem Zeitpunkt, zu dem das Betriebssystem das Touch-Ereignis empfängt, zu ermitteln.
Methodik
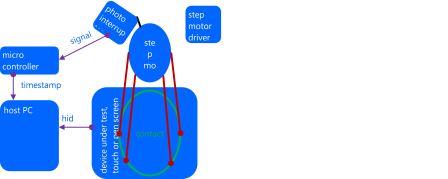
Dieser beschreibt die Vorbereitung und das Vorgehen zum Messen der Latenz eines Touch-Hardwaregeräts mithilfe eines Schrittmotors und einer Lichtschranke. Der Schrittmotor bewegt einen mechanischen Arm mit einem Betätiger, der einen menschlichen Finger simuliert. Der Auslöser zeichnet einen Kreis auf das getesteten Gerät und die Lichtschrankenschaltung erkennt, wann sich der Betätiger an einem bestimmten Kontrollpunkt befindet. Diese Informationen werden mithilfe eines Mikrocontrollers an den Hostcomputer gesendet und die Testanwendung berechnet die Latenz anhand des Zeitpunkts, an dem das Gerät ein Touch-Ereignis meldet und dem Zeitpunkt, zu dem der Betätiger tatsächlich Kontakt macht. Das folgende Diagramm zeigt das allgemeine Prinzip.
Hardwareanforderungen
In diesem Abschnitt werden die Hardwarekomponenten beschrieben, die zum Messen der Panning-Latenz erforderlich sind.
Schrittmotor und Lichtschranke
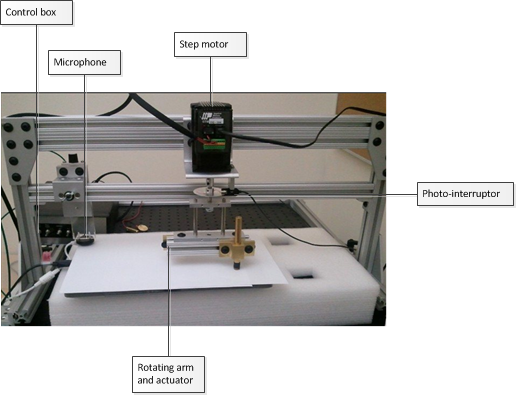
Die Messvorrichtung besteht aus einem Schrittmotor, einer Lichtschranke, einem drehbaren Arm mit Betätiger und einer Steuereinheit, die im Hintergrund der folgenden Abbildung sichtbar ist.
Die Steuereinheit verfügt über drei Steuerungsschalter und einen Netzschalter.
Motor: Schaltet den Schrittmotorarm ein und aus.
Calibrate: Wird für die Panning-Latenz nicht verwendet. Schalten Sie dies aus. (Wird nur für die Touchdown-Latenz verwendet.)
Mode: Schalten Sie zwischen Tach (bezieht sich auf die Lichtschranke, die für die Messung der Panning-Latenz verwendet wird) und Mic (Mikrofon, das für die Messung der Touchdown-Latenz verwendet wird).

Bei der Messung der Panning-Latenz sollten die anfänglichen Einstellungen wie folgt sein:
| Schaltername | State |
|---|---|
Leistung |
Aus |
Motorische Fähigkeiten |
Aus |
Calibrate |
Aus |
Modus |
Tach |
Schalten Sie die Steuereinheit ein, nachdem Sie den USB-Anschluss an den Computer angeschlossen haben. Das Anschließen per USB nach dem Einschalten des Steuerelementfelds kann zu einem unvorhersehbaren Zustand des Mikrocontrollers führen.
Schrittmotoreinstellungen
Der Schrittmotor kann auf verschiedene Weise programmiert werden. Standardmäßig ist der Schrittmotor so programmiert, dass er in einem automatisierten Kalibrierungsmodus läuft. (Dieser Modus wird ausführlicher im Abschnitt „Automatisierter Kalibrierungsmodus“ weiter unten im Dokument erläutert.) Der automatisierte Kalibrierungsmodus ist so konzipiert, dass Kalibrierungsfehler und Latenzvariationen durch manuelle Kalibrierung minimiert werden.
Während der Erfassungs- und Sammlungsphase läuft der Motor mit einer konstanten Geschwindigkeit von 0,75 Umdrehungen pro Sekunde. Die für die Erfassungs- und Sammlungsphasen verwendeten Schrittmotoreinstellungen sind wie folgt:
AC (Beschleunigung) = 0,167
DC (Verlangsamung) = 0,167
VE (Geschwindigkeit) = 0,75
Mit diesen Einstellungen dreht der Motor einmal alle 1,33 Sekunden.
Armlänge
Die Winkelgeschwindigkeit unterscheidet sich je nach Radius des Armes. Wenn beispielsweise der Radius des Kreises etwa 5 cm beträgt, beträgt die Geschwindigkeit ~25 cm pro Sekunde. Um das Testverfahren zu standardisieren, sollte die Armlänge, d. h. der Radius, 5 cm betragen, um eine Geschwindigkeit von 25 cm pro Sekunde zu erreichen. Eine Toleranz von ±1, also 24 bis 26 cm pro Sekunde, ist zulässig.
Bei kleineren Tablets mit Bildschirmdiagonale bis 10 Zoll beträgt der empfohlene Radius 3 cm statt 5 cm.
Armpositionierung
Idealerweise sollten Sie so viele Bereiche des Bildschirms wie möglich abdecken, indem Sie den Test mehrmals auf verschiedenen Bereichen des Bildschirms ausführen. In jedem Bereich des Digitizers wird eine Latenz unterhalb des Zielwerts von 15 ms erwartet.
Testen Sie das Gerät mit einer Tastatur: Wenn Sie ein Tabletgerät verwenden, benötigen Sie eine externe Tastatur, um die Testprozeduren abzuschließen.
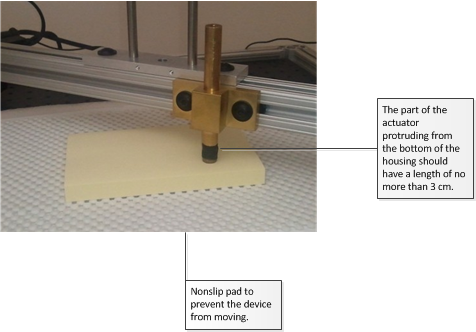
Platzieren Sie das Testgerät auf einer rutschfesten Oberfläche: Platzieren Sie das Testgerät so, dass es während des Tests nicht verschoben wird. Bei kleinen Geräten besteht eine einfache Lösung darin, sie auf einer Antirutschmatte zu platzieren, wie in der nachstehenden Abbildung dargestellt. Eine andere Möglichkeit besteht in einer Halterung, die das Gerät festhält.
Nivellieren Sie das Testgerät: Der Betätiger ist dafür ausgelegt, Beeinträchtigungen durch Schräglagen zu minimieren, die Nivellierung muss also nicht perfekt sein. Sie sollten jedoch sicherstellen, dass die Betätigeroberfläche (~9 mm Durchmesser) das Gerät einheitlich berührt und nicht nur auf einer Seite aufliegt.
Beenden Sie unnötige Prozesse auf dem Testgerät: Da Sie die Systemleistung messen, sollten Sie unnötige Prozesse auf dem Testgerät beenden.
Softwareanforderungen
Die erforderliche Software muss auf dem Microcontroller und dem Client installiert und konfiguriert werden. Wenn er als eigenständiges Gerät läuft, kopieren Sie stepmotor.exe, wlklogannotation.dll und WTTLog.dll in einen lokalen Ordner.
Testverfahren mit dem Triex-RA-Gerät
Das Testverfahren besteht aus drei Schritten: Kalibrierung, Erfassung und Sammlung. Bevor Sie den Test starten, müssen Sie das Gerät jedoch nivellieren. Der Sinn der Nivellierung besteht darin, die Ausrichtung des Geräts mit der des Motors abzugleichen. Wenn nicht ordnungsgemäß nivelliert wird, stellt der Betätiger keine guten Kontakte mit dem Digitizer her. Die vom Schrittmotor gezogenen Kreise werden unregelmäßig und wirken sich letztlich erheblich auf die Latenzzahlen aus. Es sind Verifizierungsmethoden enthalten, die den Test als fehlgeschlagen bewerten, wenn das Gerät nicht ordnungsgemäß nivelliert oder ausgerichtet ist.
Kalibrierung
Wenn Sie stepmotor.exe starten, wird ein leerer Bildschirm angezeigt. Drücken Sie die Leertaste, um die Kalibrierung zu starten. Der Zweck der Kalibrierung besteht darin, die gemeldete Position einer Berührung innerhalb einer akzeptablen Abweichung zu erkennen, wenn die Lichtschranke ausgelöst wird. Da die Kalibrierungsergebnisse die Latenzzahlen stark beeinflussen können, ist es wichtig, dass Sie sorgfältig kalibrieren.
Einrichtung
Verbinden Sie den Mikrocontroller mit dem Computer.
Aktivieren Sie den Netzschalter der Steuerungseinheit.
Schaltername State Leistung
Andererseits
Motorische Fähigkeiten
Aus
Calibrate
Aus
Modus
Tach
Stellen Sie sicher, dass der Motor-Schalter deaktiviert ist.
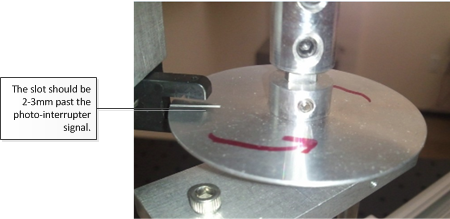
Stellen Sie sicher, dass die Lichtschranke nicht signalisiert (das Licht der Lichtschranke ist aus). Der Schlitz der Scheibe sollte ca. 2 – 3 mm nach dem Signalstrahl der Lichtschranke positioniert werden.
Für diese Positionierung gibt es zwei Gründe: Erstens zittert der Motorarm leicht, wenn Sie den Motor einschalten. Es muss vermieden werden, dass er deswegen den Strahl unterbricht und so das Signal der Lichtschranke auslöst. Zweitens: Wenn Sie ein automatisiertes Kalibrierungsskript ausführen, ist dies die Position, an der die Runde gestartet wird, und es muss sichergestellt werden, dass das Ende der Schleife (wenn die Kalibrierung beginnt) ordnungsgemäß ausgerichtet wird, sodass sie sich unter der Lichtschranke befindet. Auch wenn Sie manuell kalibrieren, ist dies immer noch eine gute Startposition, also müssen Sie nichts ändern.
Bewegen oder senken Sie den Arm erst, wenn Sie mit der Kalibrierungsphase beginnen.
Führen Sie stepmotor.exe aus. Wenn Sie das Programm über den Windows HLK-Controller ausführen, wählen Sie das Gerät und den Panning-Latenztest aus, um den Test zu starten.
Folgende Meldung wird angezeigt:
Drücken Sie die Leertaste, um den Kalibrierungsprozess zu starten.
Drücken Sie die Leertaste. Das Wort KALIBRIERUNG wird auf dem Bildschirm angezeigt.
Senken Sie den Betätiger auf die Oberfläche des Bildschirms.
Testschritte (automatisiert)
Schalten Sie den Motor ein. Der Schrittmotor läuft neun mal in einem Kalibrierungsmodus.
Am Ende des Kalibrierungsmodus hält er fünf Sekunden lang an. Folgen Sie den Anweisungen im Abschnitt Erfassung dieses Themas.
Testschritte (manuell)
Drehen Sie den Arm langsam in dieselbe Richtung wie die, in die der Motor ihn bewegt, wenn er eingeschaltet ist.
Verringern Sie die Geschwindigkeit fast bis zum vollständigen Anhalten, wenn die Nadel (oder das Loch) die Lichtschranke durchläuft. (Beachten Sie, dass die maximale Geschwindigkeit nicht 1 % der Erfassungs-/Sammlungsgeschwindigkeit überschreiten sollte. Wenn also die Erfassungs-/Sammlungsgeschwindigkeit 25 cm/s beträgt, sollte die Kalibrierungsgeschwindigkeit, wenn der Schlitz die Lichtschranke passiert, kleiner als 0,25 cm/s sein.)
Drehen Sie den Arm sorgfältig, sodass er die Lichtschranke durchläuft.
Wiederholen Sie die Schritte 1 bis 2 mindestens sechs Mal.
Wenn das Signal unterbrochen wird, sollten Sie beobachten, dass die Lichtschranke blinkt und das Testfenster die genaue Position des Bildschirms meldet, an dem der Betätiger einen Kontakt herstellt. Nachfolgend sehen Sie ein Beispielergebnis:
Touch Pointer Update count=0, x=508,y=110 Touch Pointer Update count=1, x=512,y=113
Erwartete Ergebnisse
Wenn die Kalibrierung erfolgreich ausgeführt wird, werden keine Fehlermeldungen angezeigt.
Erfassung
Während der Erfassungsphase werden die Geschwindigkeit des Schrittmotors und die Form des Kreises berechnet.
Einrichtung
Stellen Sie sicher, dass der Schlitz möglichst weit von der Lichtschranke entfernt ist.
Testschritte
Drücken Sie die Leertaste, und schalten Sie gleichzeitig den Motorschalter ein. Der Text auf dem Bildschirm sollte in ERFASSUNG geändert werden.
Lassen Sie das Gerät für ungefähr zehn Schleifen ausführen.
Drücken Sie erneut die LEERTASTE, um in den Sammlungsmodus zu wechseln.
Erwartete Ergebnisse
Der Bildschirm zeigt nun an, dass der Sammlungsmodus aktiv ist und listet die Erfassungsdaten auf. Er zeigt eine Liste der Zeiten und Geschwindigkeiten, die für jede Schleife berechnet wurden. Die ersten Schleifen können übersprungen werden, wenn der Schrittmotor gezittert und schlechte Ergebnisse geliefert hat. Ein Beispieltext lautet wie folgt:
[4]: t: 1.333 [s] v: 25.456 [cm/s]
Dies zeigt Folgendes:
[loop number]: t:<loop time in seconds> [s] v:<velocity> [cm/s]
Sammlung
Die Datensammlung stellt den letzten Schritt des Tests dar.
Einrichtung
Stellen Sie sicher, dass das Wort SAMMLUNG oben auf dem Bildschirm angezeigt wird. Wenn das Wort KALIBRIERUNG bleibt, nachdem Sie die Leertaste gedrückt haben, ist ein Fehler aufgetreten. Sie werden den Test erneut ausführen müssen.
Testschritte
Lassen Sie den Motor etwa zehn Schleifen ausführen.
Drücken Sie die LEERTASTE, um den Test abzuschließen.
Schalten Sie den Motorschalter aus.
Erwartete Ergebnisse
Ihnen wird angezeigt, ob der Test bestanden wurde oder nicht.

Testverfahren mit dem ITRI-RA-Gerät
Die Verwendung des Touch Panning-Latenztools mit dem ITRI-RA-Gerät unterscheidet sich geringfügig vom Ausführen des Tests mit dem Triex-RA-Gerät. Der eigentliche Test bleibt identisch und enthält denselben Satz von Schritten: Kalibrierung, Erfassung und Sammlung. Die Schritte zum Ausführen des Tests mit dem ITRI-Gerät sind wie folgt:
RA-Gehäuse

Beachten Sie, dass im Fall des ITRI-RA-Geräts der Kalibrierschalter drei Positionen hat: On, Off und Home, was die Mittelposition ist.
Zunächst sollten die Schalterpositionen wie folgt sein:
Schaltername State Leistung
Andererseits
Motorische Fähigkeiten
Aus
Calibrate
Aus (nach unten)
Modus
Verschieben
Nullen Sie das System, indem Sie die Schalter folgendermaßen umstellen und den Motorarm sich um 45 Grad drehen lassen. Wenn dies abgeschlossen ist, schalten Sie den Motor aus.
Schaltername State Leistung
Andererseits
Motorische Fähigkeiten
Aus
Calibrate
Home (Mitte)
Modus
Panning (oben)
Platzieren Sie den Testfinger auf dem Gerät und drücken Sie die Leertaste, um die Kalibrierungsphase zu starten. Die Schalter haben jetzt folgende Stellungen:
Schaltername State Leistung
Andererseits
Motorische Fähigkeiten
Andererseits
Calibrate
On (oben)
Modus
Panning (oben)
Lassen Sie den Test laufen, bis der Zählerwert höher als 17 ist, schalten Sie dann den Motor aus und schalten Sie den Calibrate-Schalter aus (niedrigste Position):
Schaltername State Leistung
Andererseits
Motorische Fähigkeiten
Aus
Calibrate
Off (unten)
Modus
Panning (oben)
Drücken Sie die Leertaste und schalten Sie den Motor für die Erfassungsphase wieder ein.
Nachdem der Bildschirm einen Zählerwert über 1999 anzeigt, drücken Sie die Leertaste. Die Testanzeige zeigt die Rundenzeit und Geschwindigkeit des Motors an. Warten Sie, bis die Kontaktinformationen in der Sammlungsphase für ungefähr zehn Runden gesammelt werden, und drücken Sie dann die Leertaste. An diesem Punkt ist das System fertig. Drücken Sie erneut die Leertaste und schalten Sie den Motor aus.
Analyse und Bericht
Analyse
Wenn Fehler bei der Kalibrierung oder Erfassung auftreten, schlägt der Test fehl, und Sie können Details für den Fehler im Bericht anzeigen. Es wird ein Fehler wie z. B. folgender angezeigt:
Warning multiple touch devices present.
Calibration failed: x11err=3.71 y11err=1.14 x22err=9.14 y22err=1.71
Acquisition failed: Circles are showing variations in pixel= 9.70
[135] 581 451 739 602 [199556137598] > 18 48
Bericht
Bestehen oder Fehlschlagen wird über das Windows HLK gemeldet. Wenn Sie den Test manuell ausführen, können Sie die TabletDigitizerOPK.wtl-Datei in WTT oder im Editor öffnen. Die durchschnittliche Panning-Latenz wird am Ende protokolliert. Die Ziellatenz ist gleich oder kleiner als 15 Millisekunden.
Automatisierter Kalibrierungsmodus
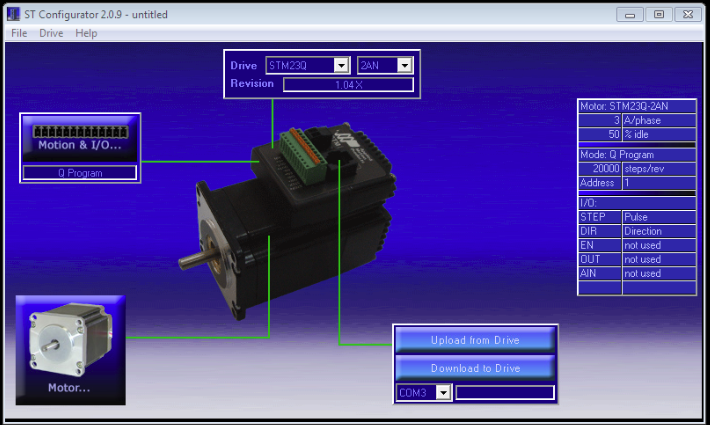
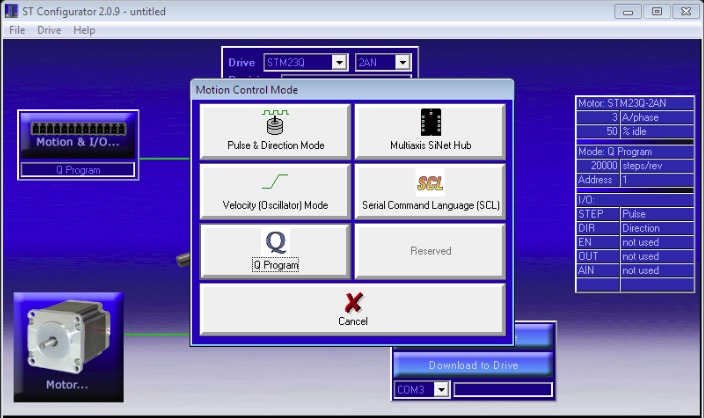
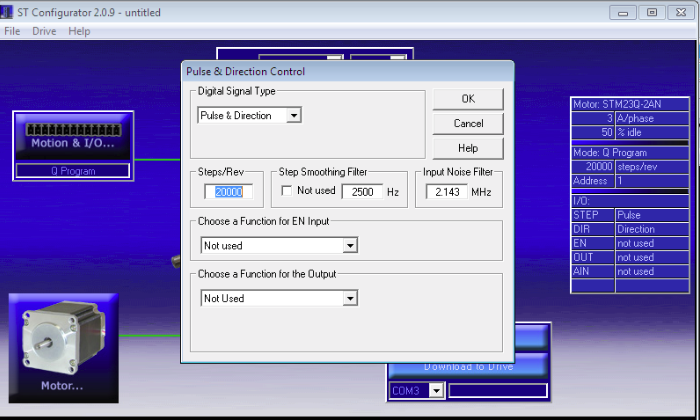
Der automatisierte Kalibrierungsmodus ist der Standardmodus für das RA-Tool. Wenn Sie das Skript ausführen, stellen Sie zunächst sicher, dass der Schrittmotor in den Q-Programmierereinstellungen auf 20000 Schritte pro Umdrehung festgelegt ist. Diese Konfiguration kann mithilfe des ST Configurator-Tools eingestellt werden. Wechseln Sie zu „Motion & I/O“ (Bewegung und E/A), und dann „Pulse & Direction Control“ (Puls und Richtungssteuerung).
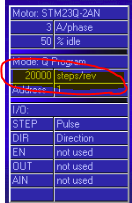
Stellen Sie sicher, dass die Einstellung „Steps/Rev“ (Schritte/Umdrehung) 20000 anzeigt.
Die Einstellungen auf der rechten Seite sollten auch den Steps/Rev-Wert anzeigen, der derzeit für den Schrittmotor festgelegt ist.
Wenn die Einstellungen korrekt sind, wird das Automatisierungsskript in drei aufeinander folgenden Modi ausgeführt:
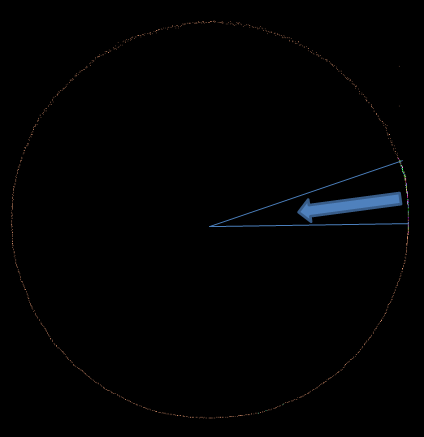
Kalibrierungsmodus: Wenn Sie den Motor zum ersten Mal aktivieren, ist dies der erste Modus, den er ausführt. Während des Kalibrierungsmodus dreht der Schrittmotor mit einer Geschwindigkeit von 0,75 Umdrehungen pro Sekunde (ca. 1,33 Sekunden pro Runde) um 339 Grad ab der Ausgangsposition. Dann stoppt er für 0,5 Sekunden, bevor er mit einer Geschwindigkeit von 0,0042 Umdrehungen pro Sekunde (die niedrigste mögliche Geschwindigkeit für Schrittmotor) um 21 Grad dreht. Während der Schrittmotor mit sehr niedriger Geschwindigkeit läuft, korreliert das Testprogramm (stepmotor.exe) die Positionen und Zeitstempel der gemeldeten Touchkontakte, wenn der Lichtschrankenstrahl unterbrochen wird.
Im folgenden Beispiel-Screenshot wird gezeigt, wie der Kreis aussehen wird. Im Bogenbereich, auf den der Pfeil zeigt, läuft der Schrittmotor mit langsamer Geschwindigkeit. Hier sollte das Signal der Lichtschranke ausgelöst werden. Es ist wichtig, die Ausgangsposition der Scheibe ordnungsgemäß auszurichten, sodass der Schlitz in der Scheibe etwa 2 – 3 mm nach der Lichtschranke ist.
Dieser Kalibrierungsbogen ist folgendermaßen ausgelegt:
VE-Parameter in Q-Programmer 0,0042 Durchschnittliche Länge des Kalibrierungssignalbogens
1,85 cm (basierend auf einem Umfang von 31,26 cm)
Durchschnittlicher Winkel des Kalibrierungssignals
0,37 Radian (21,20 Grad)
Durchschnittliche Kalibrierungssignalzeit
12,50 Sekunden (einschließlich 0,5 Sekunden Wartezeit beim Ändern der Geschwindigkeit)
Durchschnittliche Kalibrierungssignalgeschwindigkeit
Fünf Sekunden warten: Nach neun Kalibrierungsrunden wird der Motor fünf Sekunden lang angehalten. Während dieser Zeit muss die Leertaste gedrückt werden, um in den Erfassungsmodus zu wechseln.
Erfassungs-/Sammlungsmodus: Nach fünf Sekunden Wartezeit wird der Motor unendlich mit einer Geschwindigkeit von 0,75 Umdrehungen pro Sekunde (1,33 Sekunden pro Schleife) ausgeführt.
Problembehandlung
Kalibrierung
Während der Kalibrierung kann das Testprogramm die genaue Position eines Touch-Ereignisses nicht berechnen, wenn das Lichtschrankensignal ausgelöst wird. Es ist daher wichtig, dass Sie keine Latenz verursachen, indem Sie den Arm zu schnell drehen. Wenn ein Fehler auftritt, wird auf dem Bildschirm eine Fehlermeldung angezeigt. Zum Beispiel:
Calibration failed: x11err=3.71 y11err=1.14 x22err=9.14 y22err=1.71.
Halten Sie an und untersuchen Sie die Ursache, bevor Sie den Test neu starten. Es gibt einige häufige Gründe für Fehler. Sie treten auf, wenn das Testprogramm den Berührungspunkt nicht gut berechnen kann. Dies kann folgende Ursachen haben:
Sie haben den Betätiger zu schnell bewegt, als der Fotounterbrecher signalisiert hat.
Das Gerät wurde verschoben.
Beheben Sie diese Probleme, und versuchen Sie es erneut, bis Sie eine gute Kalibrierung erreichen. Beachten Sie auch Folgendes:
Drehen Sie niemals den Arm in die andere Richtung.
Bewegen Sie den Arm sehr sorgfältig, wenn Sie den Fotounterbrecher durchlaufen, um den Fehler und die Latenz zu minimieren, die Sie möglicherweise einbringen.
Es sollte immer zwei Signale geben, wenn die Lichtschranke unterbrochen wird. Das erste Signal tritt auf, wenn das Licht am Ende einer Kante durch den Schlitz dringt. Das zweite Signal tritt beim Blockieren des Lichts auf, nachdem es durch den offenen Schlitz gedrungen ist. Der Indexzähler ist nullbasiert. Nachdem zwei Ereignisse aufgetreten sind, sollte die der Zähler eine ungerade Zahl sein. Wenn die folgende Meldung angezeigt wird, wenn Sie gerade mit der Kalibrierung begonnen haben und nicht einmal den Arm gedreht haben, haben Sie wahrscheinlich den Arm (und somit die Scheibe) mindestens einmal um die Lichtschranke gedreht, was dazu führt, dass sie signalisiert hat. Dies bewirkt automatisch, dass die Kalibrierung fehlschlägt. Beenden Sie den Test sofort und starten Sie ihn neu.
Touch Pointer Update count=0, x=0, y=0
Erfassung
Wenn die Erfassung fehlschlägt, wird eine Fehlermeldung angezeigt, die einer der folgenden ähnelt:
ERROR: Acquisition failed: Loop times not consistent > 6.3
ERROR: Acquisition failed: Circles are showing too many variations in pixels Rcm_error=0.5 xPixelErr=20 yPixelErr=20
Der erste Fehlertyp wird generiert, wenn der durchschnittliche Unterschied zwischen Rundenzeiten mehr als fünf Millisekunden beträgt. Der zweite Fehlertyp tritt auf, wenn die Kreise nicht als perfekte Kreise gezeichnet werden und daher zu Pixelabweichungen führen, die größer als fünf Pixel sind. Häufige Ursachen für dieses Verhalten:
Ein falsch nivelliertes oder kalibriertes Gerät.
Das Gerät wurde verschoben.
Die Schrittmotorgeschwindigkeit ist nicht konsistent. (Dies ist keine wahrscheinliche Erklärung, da es sich um ein etabliertes, weitverwendetes Gerät handelt. Dennoch ist es möglich, dass der Motor in Ihrem bestimmten Gerät defekt ist.)
Sammlung
Bei der Sammlung sollten wenige Probleme auftreten, wenn die Kalibrierungs- und Erfassungsschritte erfolgreich waren. Die meisten Fehler sind auf externe Faktoren zurückzuführen, z. B. Verschieben des Geräts, andere Prozesse, die das Testprogramm beeinträchtigen, oder ein Fehler im eigentlichen Gerät. Es können die folgenden drei häufigen Probleme auftreten:
Problem 1: Interferenz durch elektromagnetische Felder
Es kann ein Fehler durch die Wirkung der elektromagnetischen Kraft ergeben, die vom Schrittmotor erzeugt wird. Je nach Gerät kann dies verschiedene Auswirkungen haben, z. B. die Generierung falscher Berührungspunkte. Die Lösung für das Problem besteht darin, einen gute Erdung herzustellen.
Problem 2: Andere Prozesse unterbrechen das Testprogramm
Wenn ein anderer Prozess den Testprozess unterbricht, macht dies in der Regel das Testergebnis durch negative Auswirkungen auf die Latenznummern unbrauchbar.
Sie können dieses Problem diagnostizieren, indem Sie die Intervalle der Lichtschrankensignale vergleichen. Überprüfen Sie die Datei csignal.txt, die die Zeitstempel der Lichtschrankensignale enthält. Die zweite Spalte zeigt die Systemzeitstempel und die dritte Spalte zeigt die Zeitstempel des Mikrocontrollers. Zum Beispiel:
[ 0: 0] 431506434557 538485264317
[ 1: 10] 431506447610 538485343495
[ 2: 1333] 431508166028 538495929302
[ 3: 1343] 431508178968 538496008565
[ 4: 1797] 431508769804 538499651185
[ 5: 1803] 431508776386 538499652266
[ 6: 2665] 431509897168 538506594116
[ 7: 2675] 431509910127 538506673294
[ 8: 3998] 431511628522 538517258922
[ 9: 4008] 431511641481 538517338232
[10: 5331] 431513359910 538527923775
[11: 5342] 431513372973 538528003038
sfirst = 0
Der letzte Eintrag in der Datei zeigt den Index der ersten gültigen Signalsequenz an. Eine „gültige Signalsequenz“ bezieht sich auf den Anfang der Signalsequenzen, nachdem das System stabil wurde. Zwischen Erfassung und Sammlung schreibt das Testprogramm die Erfassungsergebnisse in Protokolldateien, und je nach Leistung des Systems kann es einige Zeit dauern, bis es stabil wird. Im obigen Beispiel war das erste Signal gültig, sodass Sie mit dem Vergleichen der Zeitstempelintervalle beginnen können.
Sie ermitteln die Zeitstempelintervalle, indem Sie den Unterschied zwischen den beiden geradzahlig nummerierten Zeitstempeln notieren, z. B. 0, 2, 4, 6 usw. Wie in der folgenden Tabelle gezeigt, unterscheiden sich die Signale 4 und 6 deutlich von anderen Signalintervallen. Daher wissen wir, dass während dieser Zeit ein anderer Prozess den Test unterbrochen hat. In normalen Fällen sollte der Unterschied geringer als 1 % sein.
| Index | Zeitstempel | Intervall |
|---|---|---|
0 |
431506434557 |
|
2 |
431492585219 |
1731471 |
4 |
431494316516 |
603776 |
6 |
431496047748 |
1127364 |
8 |
431497779297 |
1731354 |
10 |
431499509508 |
1731388 |
12 |
431501240620 |
1731288 |
Problem 3: Änderungen der Samplingrate
Wenn ein Gerät seine Samplingrate ändert, tritt eine erhebliche Abweichung in den Latenzergebnissen auf. Sie können dieses Problem diagnostizieren, indem Sie die Samplingraten während Erfassung und Sammlungs vergleichen.
Sie können externe Tools verwenden, um die Samplingrate eines Geräts vor und nach dem Einschalten des Motors zu messen. Eine weitere Methode besteht darin, die Protokolle zu analysieren, die von stepmotor.exe generiert werden.
Öffnen Sie Acquisition.txt.
Verwenden Sie die Zeitstempel (letzte Spalte) der ersten und letzten Zeile (letzte Spalte):
581 660 709 602 199501901480 581 805 512 602 199554132317Berechnen Sie die Samplingrate der Erfassung wie folgt:
(Last timestamp - first timestamp) /number of samples (rows)Öffnen Sie Collection.txt.
Verwenden Sie die Zeitstempel (letzte Spalte) der ersten und letzten Zeile (letzte Spalte):
581 822 423 602 [199554407006] 581 288 164 602 [199594255626]Berechnen Sie die Samplingrate der Sammlung wie folgt:
(Last timestamp - first timestamp) /number of samples (rows)
Wenn sich die zwei Werte um mehr als 2 % unterscheiden, sind die Sammlungsdaten nicht zuverlässig und sollten die Ursache untersuchen.
Weiterer Support
Wenn zusätzlicher Support erforderlich ist, wenden Sie sich an einen der folgenden zertifizierten Testgerät-Anbieter:
Triex Technologies, Inc.
+1 (206) 940-0943
Industrial Technology Research Institute
+886 (03) 5743887