Hinweis
Für den Zugriff auf diese Seite ist eine Autorisierung erforderlich. Sie können versuchen, sich anzumelden oder das Verzeichnis zu wechseln.
Für den Zugriff auf diese Seite ist eine Autorisierung erforderlich. Sie können versuchen, das Verzeichnis zu wechseln.
In diesem letzten Abschnitt wird erläutert, wie Sie eine einfache UWP-App mit einer GUI erstellen, um die Webcam zu streamen und Objekte zu erkennen, indem Sie unser YOLO-Modell mit Windows ML auswerten.
Erstellen einer UWP-App in Visual Studio
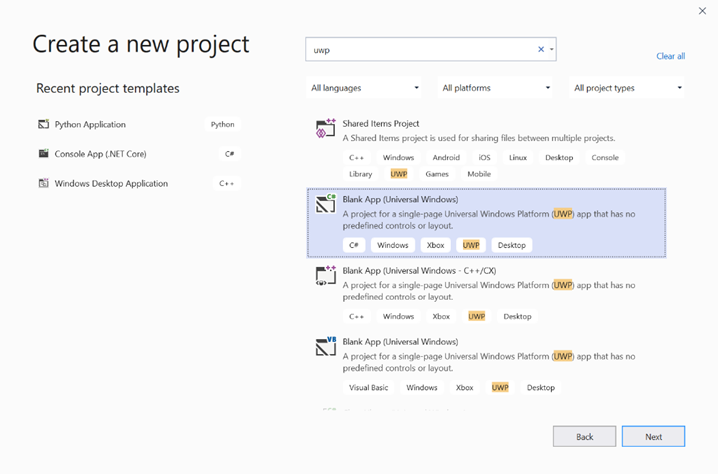
- Öffnen Sie Visual Studio, und wählen Sie die Option "
Create a new project." zum Suchen nach UWP und wählen Sie dann "Blank App (Universal Windows)" aus.
- Konfigurieren Sie auf der nächsten Seite Ihre Projekteinstellungen, indem Sie dem Projekt einen Namen und einen Speicherort zuweisen. Wählen Sie dann ein Ziel und eine Mindestversion des Betriebssystems Ihrer App aus. Um Windows ML-APIs zu verwenden, müssen Sie X verwenden, oder Sie können das NuGet-Paket auswählen, um die Unterstützung für X zu unterstützen. Wenn Sie sich für die Verwendung des NuGet-Pakets entschieden haben, folgen Sie diesen Anweisungen [link].
Aufrufen von Windows ML-APIs zum Auswerten des Modells
Schritt 1: Verwenden Sie den Machine Learning Code Generator, um Wrapperklassen für Windows ML-APIs zu generieren.
Schritt 2: Ändern Sie den generierten Code in der generierten .cs Datei. Die endgültige Datei sieht wie folgt aus:
using System;
using System.Collections.Generic;
using System.Threading.Tasks;
using Windows.Media;
using Windows.Storage;
using Windows.Storage.Streams;
using Windows.AI.MachineLearning;
namespace yolodemo
{
public sealed class YoloInput
{
public TensorFloat input_100; // shape(-1,3,416,416)
}
public sealed class YoloOutput
{
public TensorFloat concat_1600; // shape(-1,-1,-1)
}
public sealed class YoloModel
{
private LearningModel model;
private LearningModelSession session;
private LearningModelBinding binding;
public static async Task<YoloModel> CreateFromStreamAsync(IRandomAccessStreamReference stream)
{
YoloModel learningModel = new YoloModel();
learningModel.model = await LearningModel.LoadFromStreamAsync(stream);
learningModel.session = new LearningModelSession(learningModel.model);
learningModel.binding = new LearningModelBinding(learningModel.session);
return learningModel;
}
public async Task<YoloOutput> EvaluateAsync(YoloInput input)
{
binding.Bind("input_1:0", input.input_100);
var result = await session.EvaluateAsync(binding, "0");
var output = new YoloOutput();
output.concat_1600 = result.Outputs["concat_16:0"] as TensorFloat;
return output;
}
}
}
Bewertet jedes Videobild, um Objekte zu erkennen und Begrenzungsrahmen zu zeichnen.
- Fügen Sie die folgenden Bibliotheken zum mainPage.xaml.cs hinzu.
using System.Threading.Tasks;
using Windows.Devices.Enumeration;
using Windows.Media;
using Windows.Media.Capture;
using Windows.Storage;
using Windows.UI;
using Windows.UI.Xaml.Media.Imaging;
using Windows.UI.Xaml.Shapes;
using Windows.AI.MachineLearning;
- Fügen Sie die folgenden Variablen in
public sealed partial class MainPage : Page.
private MediaCapture _media_capture;
private LearningModel _model;
private LearningModelSession _session;
private LearningModelBinding _binding;
private readonly SolidColorBrush _fill_brush = new SolidColorBrush(Colors.Transparent);
private readonly SolidColorBrush _line_brush = new SolidColorBrush(Colors.DarkGreen);
private readonly double _line_thickness = 2.0;
private readonly string[] _labels =
{
"<list of labels>"
};
- Erstellen Sie eine Struktur für die Formatierung der Erkennungsergebnisse.
internal struct DetectionResult
{
public string label;
public List<float> bbox;
public double prob;
}
- Erstellen Sie ein Comparer-Objekt, das zwei Objekte vom Typ Box vergleicht. Diese Klasse wird verwendet, um begrenzende Rahmen um die erkannten Objekte zu zeichnen.
class Comparer : IComparer<DetectionResult>
{
public int Compare(DetectionResult x, DetectionResult y)
{
return y.prob.CompareTo(x.prob);
}
}
- Fügen Sie die folgende Methode hinzu, um den Webcamstream des Geräts zu initialisieren und mit der Verarbeitung jedes Frames zu beginnen, um Objekte zu erkennen.
private async Task InitCameraAsync()
{
if (_media_capture == null || _media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.Shutdown || _media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.NotStreaming)
{
if (_media_capture != null)
{
_media_capture.Dispose();
}
MediaCaptureInitializationSettings settings = new MediaCaptureInitializationSettings();
var cameras = await DeviceInformation.FindAllAsync(DeviceClass.VideoCapture);
var camera = cameras.FirstOrDefault();
settings.VideoDeviceId = camera.Id;
_media_capture = new MediaCapture();
await _media_capture.InitializeAsync(settings);
WebCam.Source = _media_capture;
}
if (_media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.NotStreaming)
{
await _media_capture.StartPreviewAsync();
WebCam.Visibility = Visibility.Visible;
}
ProcessFrame();
}
- Fügen Sie die folgende Methode hinzu, um jeden Frame zu verarbeiten. Diese Methode ruft EvaluateFrame und DrawBoxes auf, die wir in einem späteren Schritt implementieren werden.
private async Task ProcessFrame()
{
var frame = new VideoFrame(Windows.Graphics.Imaging.BitmapPixelFormat.Bgra8, (int)WebCam.Width, (int)WebCam.Height);
await _media_capture.GetPreviewFrameAsync(frame);
var results = await EvaluateFrame(frame);
await DrawBoxes(results.ToArray(), frame);
ProcessFrame();
}
- Erstellen Sie einen neuen Sigmoid-Float
private float Sigmoid(float val)
{
var x = (float)Math.Exp(val);
return x / (1.0f + x);
}
- Erstellen Sie einen Schwellenwert zum ordnungsgemäßen Erkennen von Objekten.
private float ComputeIOU(DetectionResult DRa, DetectionResult DRb)
{
float ay1 = DRa.bbox[0];
float ax1 = DRa.bbox[1];
float ay2 = DRa.bbox[2];
float ax2 = DRa.bbox[3];
float by1 = DRb.bbox[0];
float bx1 = DRb.bbox[1];
float by2 = DRb.bbox[2];
float bx2 = DRb.bbox[3];
Debug.Assert(ay1 < ay2);
Debug.Assert(ax1 < ax2);
Debug.Assert(by1 < by2);
Debug.Assert(bx1 < bx2);
// determine the coordinates of the intersection rectangle
float x_left = Math.Max(ax1, bx1);
float y_top = Math.Max(ay1, by1);
float x_right = Math.Min(ax2, bx2);
float y_bottom = Math.Min(ay2, by2);
if (x_right < x_left || y_bottom < y_top)
return 0;
float intersection_area = (x_right - x_left) * (y_bottom - y_top);
float bb1_area = (ax2 - ax1) * (ay2 - ay1);
float bb2_area = (bx2 - bx1) * (by2 - by1);
float iou = intersection_area / (bb1_area + bb2_area - intersection_area);
Debug.Assert(iou >= 0 && iou <= 1);
return iou;
}
- Implementieren Sie die folgende Liste, um die im Frame erkannten aktuellen Objekte nachzuverfolgen.
private List<DetectionResult> NMS(IReadOnlyList<DetectionResult> detections,
float IOU_threshold = 0.45f,
float score_threshold=0.3f)
{
List<DetectionResult> final_detections = new List<DetectionResult>();
for (int i = 0; i < detections.Count; i++)
{
int j = 0;
for (j = 0; j < final_detections.Count; j++)
{
if (ComputeIOU(final_detections[j], detections[i]) > IOU_threshold)
{
break;
}
}
if (j==final_detections.Count)
{
final_detections.Add(detections[i]);
}
}
return final_detections;
}
- Implementieren Sie die folgende Methode.
private List<DetectionResult> ParseResult(float[] results)
{
int c_values = 84;
int c_boxes = results.Length / c_values;
float confidence_threshold = 0.5f;
List<DetectionResult> detections = new List<DetectionResult>();
this.OverlayCanvas.Children.Clear();
for (int i_box = 0; i_box < c_boxes; i_box++)
{
float max_prob = 0.0f;
int label_index = -1;
for (int j_confidence = 4; j_confidence < c_values; j_confidence++)
{
int index = i_box * c_values + j_confidence;
if (results[index] > max_prob)
{
max_prob = results[index];
label_index = j_confidence - 4;
}
}
if (max_prob > confidence_threshold)
{
List<float> bbox = new List<float>();
bbox.Add(results[i_box * c_values + 0]);
bbox.Add(results[i_box * c_values + 1]);
bbox.Add(results[i_box * c_values + 2]);
bbox.Add(results[i_box * c_values + 3]);
detections.Add(new DetectionResult()
{
label = _labels[label_index],
bbox = bbox,
prob = max_prob
});
}
}
return detections;
}
- Fügen Sie die folgende Methode hinzu, um die Felder um die objekte zu zeichnen, die im Rahmen erkannt wurden.
private async Task DrawBoxes(float[] results, VideoFrame frame)
{
List<DetectionResult> detections = ParseResult(results);
Comparer cp = new Comparer();
detections.Sort(cp);
IReadOnlyList<DetectionResult> final_detetions = NMS(detections);
for (int i=0; i < final_detetions.Count; ++i)
{
int top = (int)(final_detetions[i].bbox[0] * WebCam.Height);
int left = (int)(final_detetions[i].bbox[1] * WebCam.Width);
int bottom = (int)(final_detetions[i].bbox[2] * WebCam.Height);
int right = (int)(final_detetions[i].bbox[3] * WebCam.Width);
var brush = new ImageBrush();
var bitmap_source = new SoftwareBitmapSource();
await bitmap_source.SetBitmapAsync(frame.SoftwareBitmap);
brush.ImageSource = bitmap_source;
// brush.Stretch = Stretch.Fill;
this.OverlayCanvas.Background = brush;
var r = new Rectangle();
r.Tag = i;
r.Width = right - left;
r.Height = bottom - top;
r.Fill = this._fill_brush;
r.Stroke = this._line_brush;
r.StrokeThickness = this._line_thickness;
r.Margin = new Thickness(left, top, 0, 0);
this.OverlayCanvas.Children.Add(r);
// Default configuration for border
// Render text label
var border = new Border();
var backgroundColorBrush = new SolidColorBrush(Colors.Black);
var foregroundColorBrush = new SolidColorBrush(Colors.SpringGreen);
var textBlock = new TextBlock();
textBlock.Foreground = foregroundColorBrush;
textBlock.FontSize = 18;
textBlock.Text = final_detetions[i].label;
// Hide
textBlock.Visibility = Visibility.Collapsed;
border.Background = backgroundColorBrush;
border.Child = textBlock;
Canvas.SetLeft(border, final_detetions[i].bbox[1] * 416 + 2);
Canvas.SetTop(border, final_detetions[i].bbox[0] * 416 + 2);
textBlock.Visibility = Visibility.Visible;
// Add to canvas
this.OverlayCanvas.Children.Add(border);
}
}
- Nachdem wir nun die notwendige Infrastruktur behandelt haben, ist es an der Zeit, die Bewertung selbst zu integrieren. Diese Methode wertet das Modell anhand des aktuellen Frames aus, um Objekte zu erkennen.
private async Task<List<float>> EvaluateFrame(VideoFrame frame)
{
_binding.Clear();
_binding.Bind("input_1:0", frame);
var results = await _session.EvaluateAsync(_binding, "");
Debug.Print("output done\n");
TensorFloat result = results.Outputs["Identity:0"] as TensorFloat;
var shape = result.Shape;
var data = result.GetAsVectorView();
return data.ToList<float>();
}
- Unsere App muss irgendwie starten. Fügen Sie eine Methode hinzu, die den Webcamdatenstrom und die Modellauswertung beginnt, wenn der Benutzer die
GoSchaltfläche drückt.
private void button_go_Click(object sender, RoutedEventArgs e)
{
InitModelAsync();
InitCameraAsync();
}
- Fügen Sie eine Methode zum Aufrufen von Windows ML-APIs zum Auswerten des Modells hinzu. Zuerst wird das Modell aus dem Speicher geladen, und dann wird eine Sitzung erstellt und an den Speicher gebunden.
private async Task InitModelAsync()
{
var model_file = await StorageFile.GetFileFromApplicationUriAsync(new Uri("ms-appx:///Assets//Yolo.onnx"));
_model = await LearningModel.LoadFromStorageFileAsync(model_file);
var device = new LearningModelDevice(LearningModelDeviceKind.Cpu);
_session = new LearningModelSession(_model, device);
_binding = new LearningModelBinding(_session);
}
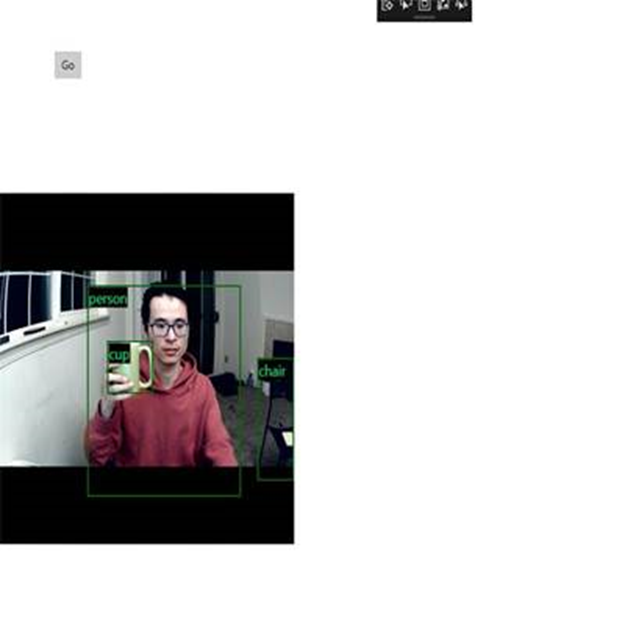
Starten der Anwendung
Sie haben jetzt erfolgreich eine Echtzeit-Objekterkennungsanwendung erstellt! Wählen Sie die Run Schaltfläche auf der oberen Leiste von Visual Studio aus, um die App zu starten. Die App sollte wie folgt aussehen.
Zusätzliche Ressourcen
Weitere Informationen zu themen, die in diesem Lernprogramm erwähnt werden, finden Sie in den folgenden Ressourcen:
- Windows ML-Tools: Erfahren Sie mehr Tools wie das Windows ML-Dashboard, WinMLRunner und den mglen Windows ML-Codegenerator.
- ONNX-Modell: Erfahren Sie mehr über das ONNX-Format.
- Windows ML-Leistung und Arbeitsspeicher: Erfahren Sie mehr zum Verwalten der App-Leistung mit Windows ML.
- Referenz zur Windows Machine Learning-API: Erfahren Sie mehr über drei Bereiche von Windows ML-APIs.