Azure Kinect DK
A Microsoft developer kit and peripheral device with advanced artificial intelligence sensors for sophisticated computer vision and speech models.
290 questions
This browser is no longer supported.
Upgrade to Microsoft Edge to take advantage of the latest features, security updates, and technical support.
' cx='32' cy='32' r='32' /%3E%3Ctext x='50%25' y='55%25' dominant-baseline='middle' text-anchor='middle' fill='%23FFF' %3EDC%3C/text%3E%3C/svg%3E)
Hello,
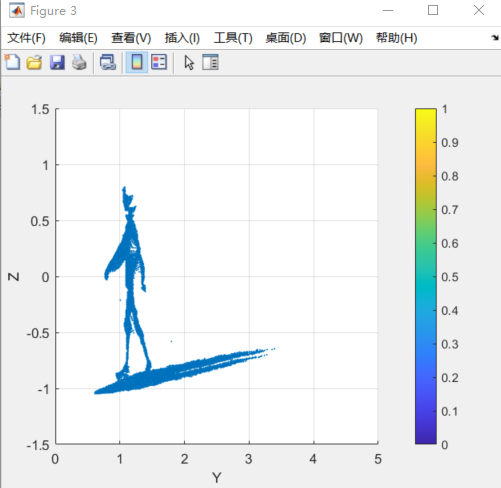
The point cloud is tilted, and the bottom is the floor, and you can see that the floor and the person are tilted.
How we can solve this problem?
Thank you.
' cx='32' cy='32' r='32' /%3E%3Ctext x='50%25' y='55%25' dominant-baseline='middle' text-anchor='middle' fill='%23FFF' %3EQ%3C/text%3E%3C/svg%3E)
Hello @dongjiang cao Welcome to Microsoft Q&A Platform and thanks for your query. Community SME's on this topic or our team will review your scenario and circle back at the possible earliest time.
' cx='32' cy='32' r='32' /%3E%3Ctext x='50%25' y='55%25' dominant-baseline='middle' text-anchor='middle' fill='%23FFF' %3EQM%3C/text%3E%3C/svg%3E)
The depth camera is pointed 6 deg down relative to the color camera.
https://learn.microsoft.com/en-us/azure/kinect-dk/coordinate-systems
You can use the IMU to determine the physical angle of the camera to determine the angle of the camera to the floor and make the necessary coordinate adjustments. Alternatively you can do floor detection and make the necessary coordinate adjustments.
' cx='32' cy='32' r='32' /%3E%3Ctext x='50%25' y='55%25' dominant-baseline='middle' text-anchor='middle' fill='%23FFF' %3EJM%3C/text%3E%3C/svg%3E)
You all have mis-stated the use of the IMU: According to the documentation, the IMU is a RATE GYRO ... that is it provides the rate of change with regard to the angle measured. One can integrate the changes over time to determine the change in pose of the Kinect; but to know the absolute angle one requires knowledge of the initial state which is not known from the IMU itself.
Re the downward angle of the Depth Camera: My reading of the documentation is that while the Depth camera is physically pointed down that nevertheless the SDK presents the depth camera in the same plane as the RGB. Which point is correct ?
@JAMES MORGENSTERN you can use the 3 accelerometers to measure the gravity vector and thus calculate the angle of the camera to the floor
@Quentin Miller well, useful thought. here is my confusion then: the Kinect is oriented pointing down, that is the Z axis is perpendicular to the floor and xy plane is parallel to the floor. The accelerometer readouts are [from your Kinect SDK viewer] : X=9.8, Y=-.2, Z=0.
Since Z is in the direction of the gravity vector wouldnt I expect Z=9.8m/s/s and not the X accelerometer ?.
@JAMES MORGENSTERN well that is most weird. Just checked my Azure Kinect. Laid flat (tripod mount touching table) on the edge of a table (chin hanging over the edge) I am seeing Z=-9.8. I get X as 9.8 if the camera is face down (glass touching table) on the table.
https://learn.microsoft.com/en-us/azure/kinect-dk/coordinate-systems#gyroscope-and-accelerometer