Near Mode: What it is (and isn’t)
There has been a lot of speculation on what near mode is since we announced it. As I mentioned in the original post, the Kinect for Windows device has new firmware which enables the depth camera to see objects as close as 50 centimeters in front of the device without losing accuracy or precision, with graceful degradation down to 40 centimeters.
The lenses on the Kinect for Windows sensor are the same as the Kinect for Xbox 360 sensor, so near mode does not change the field of view as some people have been speculating. As some have observed, the Kinect for Xbox 360 sensor was already technically capable of seeing down 50 centimeters – but with the caveat “as long as the light is right”.
That caveat turned out to be a pretty big caveat. The Kinect for Windows team spent many months developing a way to overcome this so the sensor would properly detect close up objects in more general lighting conditions. This resulted not only in the need for new firmware, but changes to the way the devices are tested on the manufacturing line. In addition to allowing the sensor to see objects as close as 40 centimeters, these changes make the sensor less sensitive to more distant objects: when the sensor is in near mode, it has full accuracy and precision for objects 2 meters away, with graceful degradation out to 3 meters. Here is a handy chart one of our engineers made that shows the types of depth values returned by the runtime:
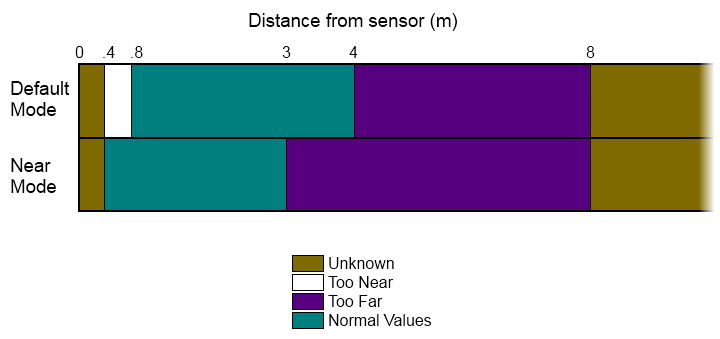 In Beta 2, for an object 800-4000 millimeters from the sensor the runtime would return the depth value, and the runtime returned a 0 regardless if the detected depth was unknown, too near or too far. Our version 1.0 runtime will return depth values if an object is in the above cyan zone. If the object is in the purple, brown or white zones, the runtime will return a distinct value indicating the appropriate zone.
In Beta 2, for an object 800-4000 millimeters from the sensor the runtime would return the depth value, and the runtime returned a 0 regardless if the detected depth was unknown, too near or too far. Our version 1.0 runtime will return depth values if an object is in the above cyan zone. If the object is in the purple, brown or white zones, the runtime will return a distinct value indicating the appropriate zone.
Additionally, in version 1.0 of the runtime, near mode will have some skeletal support, although not full 20-joint skeletal tracking (ST). The below table outlines the differences between the default mode and near mode:
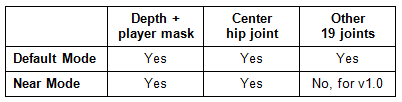
We believe that near mode, with its operational envelope of 40 centimeters to 3 meters, will enable many new classes of applications. While full 20-joint ST will not be supported in near mode with version 1.0 of the runtime, we will be working hard to support ST in near mode in the future!
Craig Eisler
General Manager, Kinect for Windows