Note
Access to this page requires authorization. You can try signing in or changing directories.
Access to this page requires authorization. You can try changing directories.
A 'Big ' Challenge for groups of programmers has been created by Nonki. We are recruiting during August for development in September.
In summary the challenge is to create a marionette puppet in Small Basic, here is an extract of the challenge:
"create a marionette (or puppet) per group which can be moved by user interaction"
If you fancy working on this in a group effort, whatever your programming level, then add a post to the Small Basic Big Challenge Thread. Working in a group can make learning programming more fun.
This blog outlines some ideas for the physics part of the challenge which could be a bit tricky, other aspects of the challenge not addressed here include:
- marionette (or puppet) graphics
- user interface design
- user control
Physical Principals
Basically, a marionette will consist of limbs connected together. We can say that each limb will have a certain length (L) and perhaps a mass (M). The limbs could all have equal mass or have a mass dependent on the limb size in some way.
The limbs are connected at joints (or nodes), so each node has one or more limbs connected to it.
The simplest analogy is to think of the limbs as connected springs to help calculate their movements.
Here are some physical principals.
- When the marionette is stationary, the force on each node is zero in all directions.
- The limbs connected to a node exert a force down (+Y) proportional to the limb mass.
- If the limbs are stretched beyond their natural length then they are in tension and exert a force proportion to the extension in a direction to contract the limb.
- If the limbs are compressed below their natural length then they are in compression and may exert a force proportional to the compression in a direction to extend the limb.
- Strings connected to limbs only act in tension (strings cannot push something, they only pull).
Node Forces
Here is a schematic picture of a node at (X,Y) connected to 3 limbs.

The natural length of the limbs are shown in blue (L1, L2 and L3)
Limbs 1 and 2 are stretched beyond this length by E1 and E2, while limb 3 is compressed by distance C3.
- The force exerted on the central node by limb1 is proportional to E1/L1 in a direction away from the node.
- The force exerted on the central node by limb2 is proportional to E2/L2 in a direction away from the node.
- The force exerted on the central node by limb3 is proportional to C3/L3 in a direction towards the node. This compressive force term is not used for strings, and may optionally also be omitted for limbs.
Each force vector can be resolved into X and Y components, and added separately with a contribution to each node from its connected limbs.
- Assume the node is at (X,Y) and the far end of limb1 is at (X1,Y1), the a vector in the direction of the limb away from the node is (X1-X,Y1-Y), so the force vector for this limb on the node is proportional to (X1-X,Y1-Y) * E1 / L1. Note that the length of the vector (X1-X,Y1-Y) is L1+E1, the length of the stretched or extended limb (Lext).
- Additionally, there is a gravity force down (positive Y direction) on the node proportional to the mass of the connected limbs.
- The gravity and limb stretching forces will need to be suitably scaled to provide smooth movement. Scaling will just be fixed numbers that multiply the forces or gravity terms.
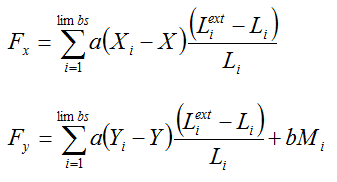
Where a and b are scaling factors and Lext is the extended (or compressed) length of a limb. If compression is not used, then only terms where Lext > L are included.
Animation Scheme
The exact physics isn't that critical, just the basic principals.
- If the limbs are too 'stiff' with large forces (large scaling factor a) the scheme may oscillate or be unstable, if the limbs are too 'springy' they may stretch unrealistically far - its a balance to what 'looks good'.
- If the gravity forces are too large (large scaling factor b) then the limbs may be stretched too far, if the gravity forces are too weak then the marionette will tend to float about and not fall realistically as it is moved.
The net force vectors (Fx,Fy) for each node are calculated, then used to move the nodes towards stationary (zero net force) positions. We can move the nodes by an amount proportional to the net forces and their directions, then recalculate everything with the updated node positions.
 , where c is another scaling factor.
, where c is another scaling factor.
In some cases, stability may be improved by averaging (Fx,Fy) from one step to the next to reduce oscillation about a zero force solution.
If the scheme forces are well scaled, then after a few steps the marionette nodes will be balanced with zero net force, until we move the strings. The top of the strings are fixed positions and are moved only by the user in some way.

Comments
Anonymous
August 26, 2014
Wow, thank you, LitDev! Very enlightening!Anonymous
August 27, 2014
The concept of limb pieces stretching and compressing, while not impossible, is not standard in a marionette. What one will expect to see is a pendulum effect with decay over time as the limbs are pulled into motion by the strings.Anonymous
August 28, 2014
The comment has been removedAnonymous
August 20, 2015
I just added rain to litdevs prototype: smallbasic.com/programAnonymous
September 23, 2015
Thanks Jibba Jabba!Anonymous
October 18, 2016
demo.puppets.lifeCheers