Note
Access to this page requires authorization. You can try signing in or changing directories.
Access to this page requires authorization. You can try changing directories.
Azure Kinect body tracking can track multiple human bodies at the same time. Each body includes an ID for temporal correlation between frames and the kinematic skeleton. The number of bodies detected in each frame can be acquired using k4abt_frame_get_num_bodies().
Joints
Joint position and orientation are estimates relative to the global depth sensor frame of reference. The position is specified in millimeters. The orientation is expressed as a normalized quaternion.
Joint coordinates
The position and orientation of each joint form its own right-handed joint coordinate system. All joint coordinate systems are absolute coordinate systems in the depth camera 3D coordinate system.
Note
The choice of flipped axis orientation for corresponding joints across the two sides of the body is intended to simplify mirror movement e.g. raise both arms by +20 degrees, which is common with commercial avatars, game engines, and rendering software.
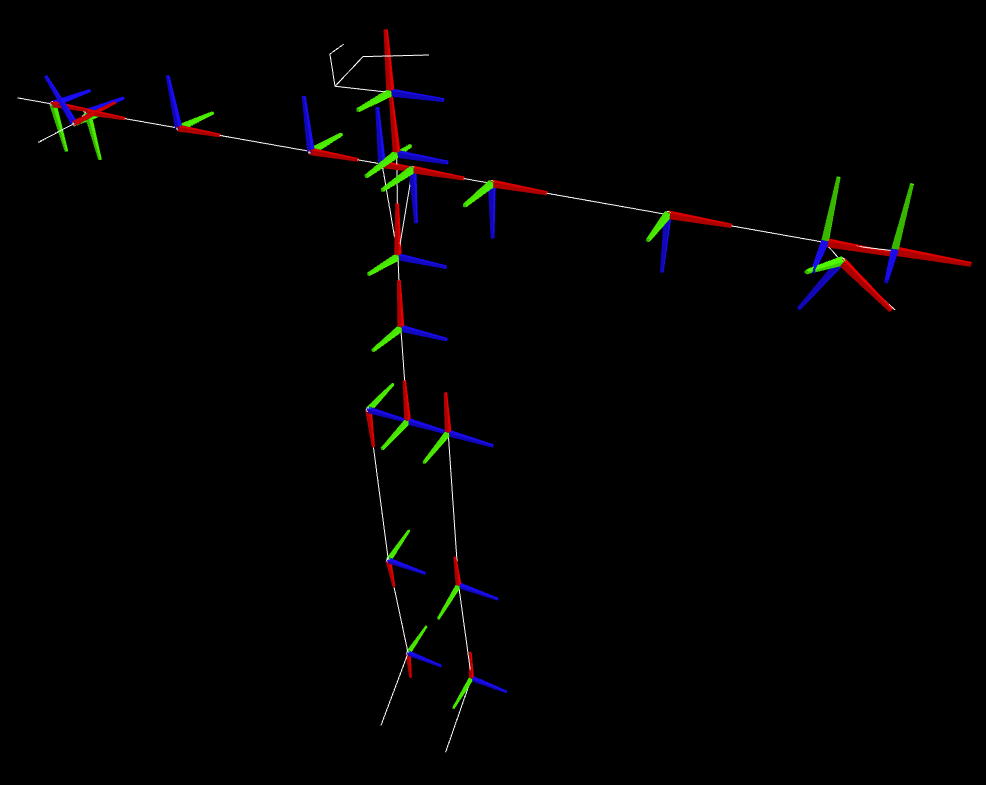
Legend: | x-axis = red | y-axis = green | z-axis = blue |
Note
The visual output of the k4abt_simple_3d_viewer.exe tool is mirrored.
Joint hierarchy
A skeleton includes 32 joints with the joint hierarchy flowing from the center of the body to the extremities. Each connection (bone) links the parent joint with a child joint. The figure illustrates the joint locations and connection relative to the human body.
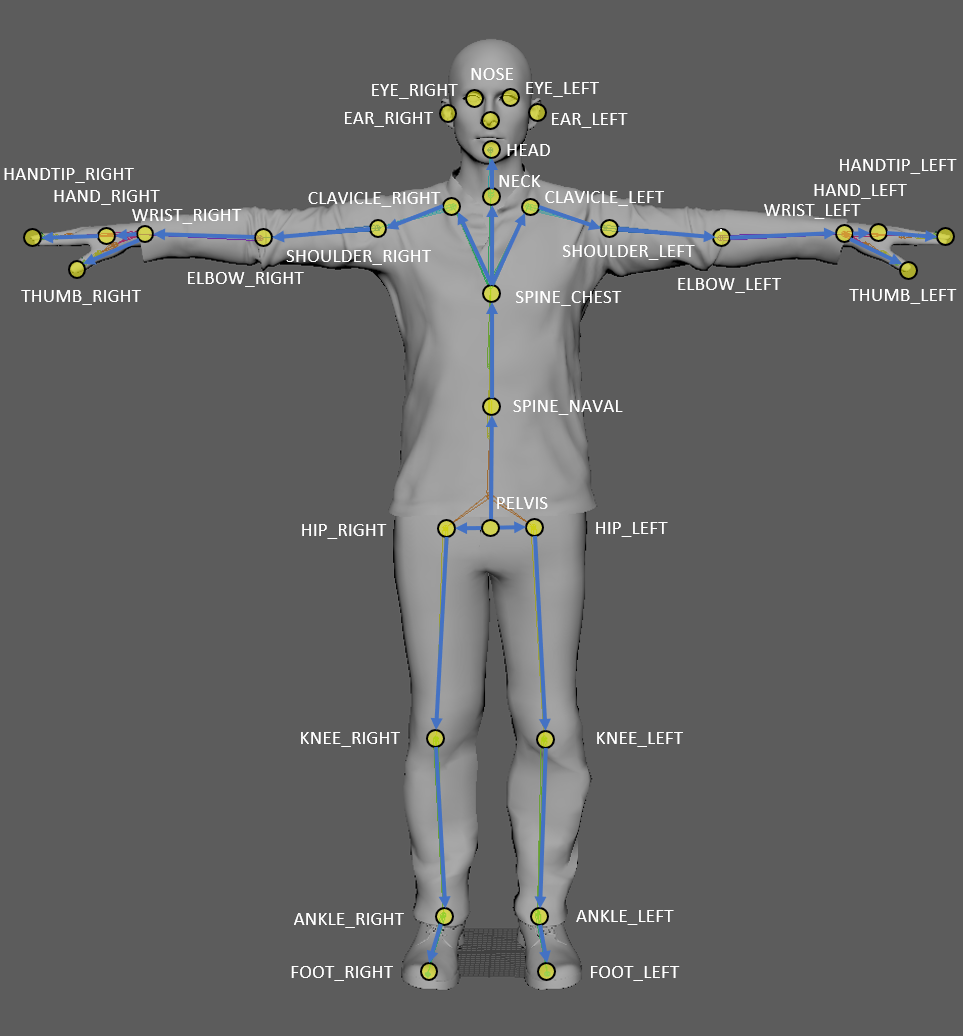
The following table enumerates the standard joint connections.
| Index | Joint name | Parent joint |
|---|---|---|
| 0 | PELVIS | - |
| 1 | SPINE_NAVAL | PELVIS |
| 2 | SPINE_CHEST | SPINE_NAVAL |
| 3 | NECK | SPINE_CHEST |
| 4 | CLAVICLE_LEFT | SPINE_CHEST |
| 5 | SHOULDER_LEFT | CLAVICLE_LEFT |
| 6 | ELBOW_LEFT | SHOULDER_LEFT |
| 7 | WRIST_LEFT | ELBOW_LEFT |
| 8 | HAND_LEFT | WRIST_LEFT |
| 9 | HANDTIP_LEFT | HAND_LEFT |
| 10 | THUMB_LEFT | WRIST_LEFT |
| 11 | CLAVICLE_RIGHT | SPINE_CHEST |
| 12 | SHOULDER_RIGHT | CLAVICLE_RIGHT |
| 13 | ELBOW_RIGHT | SHOULDER_RIGHT |
| 14 | WRIST_RIGHT | ELBOW_RIGHT |
| 15 | HAND_RIGHT | WRIST_RIGHT |
| 16 | HANDTIP_RIGHT | HAND_RIGHT |
| 17 | THUMB_RIGHT | WRIST_RIGHT |
| 18 | HIP_LEFT | PELVIS |
| 19 | KNEE_LEFT | HIP_LEFT |
| 20 | ANKLE_LEFT | KNEE_LEFT |
| 21 | FOOT_LEFT | ANKLE_LEFT |
| 22 | HIP_RIGHT | PELVIS |
| 23 | KNEE_RIGHT | HIP_RIGHT |
| 24 | ANKLE_RIGHT | KNEE_RIGHT |
| 25 | FOOT_RIGHT | ANKLE_RIGHT |
| 26 | HEAD | NECK |
| 27 | NOSE | HEAD |
| 28 | EYE_LEFT | HEAD |
| 29 | EAR_LEFT | HEAD |
| 30 | EYE_RIGHT | HEAD |
| 31 | EAR_RIGHT | HEAD |