Note
Access to this page requires authorization. You can try signing in or changing directories.
Access to this page requires authorization. You can try changing directories.
As an option, the driver for a general-purpose I/O (GPIO) controller can provide support for GPIO interrupts. To support GPIO interrupts, a GPIO controller driver implements a set of callback functions to manage these interrupts. The driver includes pointers to these callback functions in the registration packet that the driver supplies when it registers itself as a client of GPIO framework extension (GpioClx). For more information about this registration packet, see GPIO_CLIENT_REGISTRATION_PACKET.
As a rule, a GPIO controller that is an integrated part of a System on a Chip (SoC) chip has memory-mapped hardware registers that can be directly accessed by the processor in the SoC chip. However, a separate GPIO controller device might be connected externally to the SoC chip through a serial bus, as shown in the following diagram.
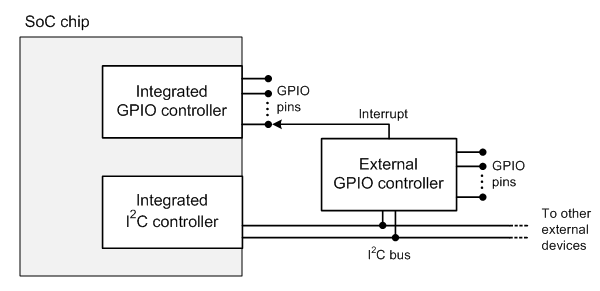
In this diagram, the external GPIO controller is connected to an I²C bus. This bus is controlled by an I²C bus controller that is an integrated part of the SoC chip. The interrupt request line from the external GPIO controller is connected to a pin on the integrated GPIO controller. The GpioClx DDI can accommodate both the integrated GPIO controller and the external GPIO controller in this example.
If a GPIO controller device is memory-mapped, the GPIO controller driver can directly access the controller's hardware registers at DIRQL. However, if the GPIO controller is serially connected, the GPIO controller driver can access the hardware registers only at IRQL = PASSIVE_LEVEL, as discussed in Passive-Level ISRs.
The driver for a GPIO controller that has memory-mapped hardware registers should set the MemoryMappedController flag bit in the device information that the driver provides to GpioClx. Otherwise, GpioClx assumes that the hardware registers are not memory-mapped, and that the driver can access these registers only at IRQL = PASSIVE_LEVEL. For more information about this flag bit, see CONTROLLER_ATTRIBUTE_FLAGS.
GpioClx implements an interrupt service routine (ISR) to service interrupt requests from the GPIO controller. This ISR calls the following interrupt-related callback functions:
CLIENT_ClearActiveInterrupts CLIENT_MaskInterrupts CLIENT_QueryActiveInterrupts CLIENT_QueryEnabledInterrupts CLIENT_UnmaskInterrupt These functions are called at either DIRQL or PASSIVE_LEVEL, depending on whether the ISR in GpioClx runs at DIRQL or PASSIVE_LEVEL. The ISR calls these functions at DIRQL if MemoryMappedController = 1, and at PASSIVE_LEVEL if MemoryMappedController = 0. In either case, the ISR automatically serializes its callbacks so that a call to one of these functions does not occur in the middle of a call to another of these functions.
The GPIO framework extension calls the following interrupt-related callback functions only at PASSIVE_LEVEL, regardless of whether the MemoryMappedController flag is set:
CLIENT_DisableInterrupt CLIENT_EnableInterrupt If the MemoryMappedController flag is not set, all of the interrupt-related callback functions are called at PASSIVE_LEVEL. GpioClx automatically serializes calls to these functions so that a call to one of these functions does not occur in the middle of a call to another of these functions.
However, if the MemoryMappedController flag is set, the CLIENT_EnableInterrupt and CLIENT_DisableInterrupt functions must explicitly synchronize their interrupt enable and disable operations to the GpioClx ISR, which calls the other four interrupt-related callback functions at DIRQL.
Typically, the other CLIENT_Xxx callback functions (whose names do not contain "Interrupt") do not perform interrupt-related processing and, therefore, do not need to synchronize to the GpioClx ISR. However, if any of these functions are called at PASSIVE_LEVEL and contain code that accesses interrupt settings that are accessed by interrupt-related functions at DIRQL, this code must be synchronized to the ISR.
To support interrupt synchronization, GpioClx implements a set of interrupt locks. A callback function that runs at PASSIVE_LEVEL can call the GPIO_CLX_AcquireInterruptLock method to acquire an interrupt lock, and call the GPIO_CLX_ReleaseInterruptLock method to release the lock. When the function holds the interrupt lock, the GpioClx ISR cannot run, and this ISR cannot call any interrupt-related callback function. To enable GPIO interrupts to be handled in a timely way, the driver should hold the interrupt lock for no longer than is necessary.
For more information, see Interrupt Synchronization for GPIO Controller Drivers.