Soft Real-Time on Windows IoT Enterprise
Windows 10 soft real-time is a new feature with Windows 10 IoT Enterprise, version 21H2 that allows device makers to introduce soft real-time capabilities on their devices.
This real-time behavior is introduced through 4 key settings:
CPU isolation: migrates the system-level disturbances off of the isolated CPUs, reducing potential jitter to the user's real-time application
Custom ISR/DPC pinning on isolated CPUs: All hardware interrupts are routed to the system and non-real-time cores but by writing a Custom ISR/DPC driver you can route your device specific interrupts to the real-time cores.
Priority inheritance for mutexes: This setting ensures the highest priority thread is executed, even in complex multi-threaded scenarios.
Up to 16 RT thread priority levels: This allows the programmer to divvy up resources among real-time tasks to ensure the most important ones get executed first.
What is a Real-Time Operating System?
When running a program, a normal operating system gives deterministic results but allows for a nondeterministic time to complete a task. In a real-time operating system both the results of program execution and the time taken to get those results are (at least partially) deterministic.
Hard Real-Time vs. Soft Real-Time
A hard real-time operating system is one where the time taken is deterministic to an exact moment. These operating systems are deployed in use cases where failure to get results on time represents a total system failure. Examples include micro-controllers within a car engine or airplane, printers, laser cutters, etc. Azure Real-Time OS is an example of such an OS.
A soft real-time operating system is one where there is a small window of time for program completion rather than a precise moment due to a bit of jitter from the operating system. Soft real-time systems, though less precise, can be run on multiple cores and impose fewer restrictions on applications. This is the type of real-time performance that you can expect from Windows 10 IoT Enterprise after using this guide.
When do I need Real-Time Performance?
Real-time performance is not necessarily faster performance. It is just predictable performance. If you want better overall system performance – soft real-time might not be your best route to achieving it. However, if you have a real-world constraint (such as a calculation that must be performed before a robot’s environment changes or a motor that must be activated before a conveyor belt moves along) then soft real-time might be what you need.
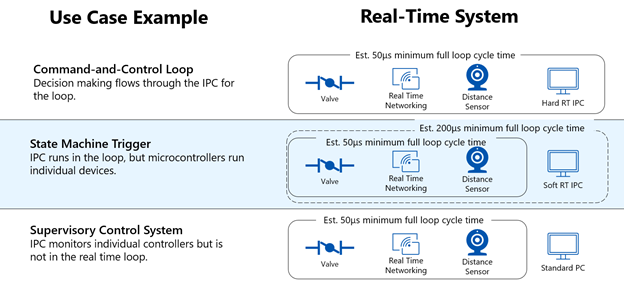
Soft real-time devices are more often used within a broader control loop to trigger behaviors from a state machine. Smaller hard real-time control loops sit within the broader loop and operate on independent micro-controllers until the soft real-time machine provides an input to change their behavior. Many command-and-control loops have strenuous cycle time demands and need to use a hard real-time device in the loop for direct control.