Nota:
El acceso a esta página requiere autorización. Puede intentar iniciar sesión o cambiar directorios.
El acceso a esta página requiere autorización. Puede intentar cambiar los directorios.
Mientras un flujo de grabación de audio está en el estado de ejecución, el rol del controlador de puerto WaveRT es mínimo. Como se muestra en el diagrama siguiente, durante el proceso de grabación, el dispositivo de audio captura datos de audio y lo escribe en el búfer cíclico. A continuación, el motor de audio lee estos datos del búfer. Esta actividad no requiere ninguna intervención del controlador de puerto. En otras palabras, los datos de audio fluyen directamente entre el hardware de audio y la aplicación en modo de usuario sin que los componentes de software del modo kernel se toquen.
En el diagrama siguiente, el registro y las posiciones de lectura avanzan continuamente de izquierda a derecha a medida que el flujo fluye a través del búfer. Cuando el registro o la posición de lectura alcanzan el final del búfer, se ajusta al inicio del búfer.
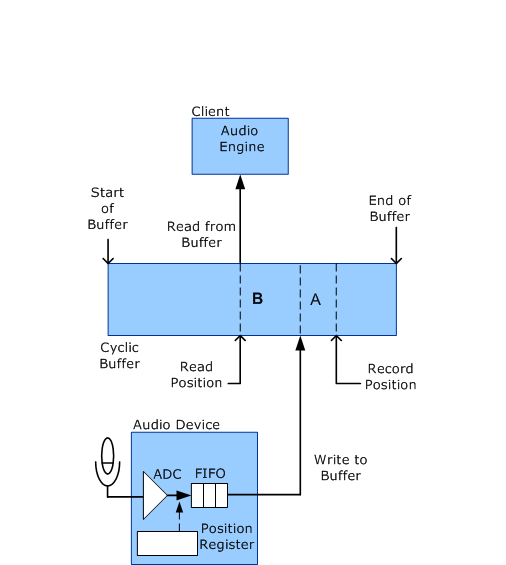
El diagrama anterior identifica la posición del registro como la ubicación del búfer del ejemplo que el dispositivo de audio está grabando actualmente (capturando desde el micrófono a través del convertidor analógico a digital o ADC). Tenga en cuenta que la posición del registro es la ubicación futura del búfer en la que el dispositivo de audio escribe la muestra después de pasar a través del FIFO. La posición de lectura es la posición del búfer desde la que el motor de audio lee el siguiente ejemplo.
La latencia desde el momento en que el dispositivo de audio captura una muestra de audio en el ADC hasta que el cliente lee simplemente es la separación entre las posiciones de registro y lectura. Esta separación es la suma de los siguientes orígenes de latencia (marcados como A y B en el diagrama):
Latencia A: después de capturar datos del ADC, el dispositivo de audio almacena los datos en un FIFO de hardware hasta que pueda escribir los datos en el búfer cíclico.
Latencia B: después de que el dispositivo de audio escriba datos en el búfer cíclico, los datos residen en el búfer hasta que el cliente lee los datos.
El cliente no tiene control sobre la latencia A, que depende completamente del hardware. Un FIFO típico podría almacenar aproximadamente 64 muestras del ADC. Sin embargo, el cliente controla la latencia B. Hacer que la latencia B sea demasiado grande introduce retrasos innecesarios en el sistema, pero si es demasiado pequeña, presenta el riesgo de leer datos demasiado pronto, antes de que el dispositivo de audio escriba en el búfer.
Aunque el cliente puede configurar un temporizador para activar periódicamente su subproceso de lectura de búfer, este método no logra la latencia más pequeña. Para reducir aún más la latencia, el cliente puede configurar el dispositivo de audio para generar una notificación de hardware cada vez que el dispositivo termine de escribir un nuevo bloque de datos de captura en el búfer. En este caso, el subproceso de cliente se activa mediante notificaciones de hardware en lugar de mediante un temporizador.
Al hacer que el dispositivo de audio notifique al motor de audio periódicamente, el cliente puede reducir la latencia a niveles que de otra manera no serían alcanzables.
El cliente (normalmente el motor de audio) puede obtener un resumen de los retrasos que el dispositivo de audio contribuye a la latencia de la transmisión mediante el envío de una solicitud KSPROPERTY_RTAUDIO_HWLATENCY al controlador de puerto WaveRT.
Después de que el cliente determine la cantidad de separación que se debe mantener entre las posiciones de registro y lectura, el cliente supervisa los cambios en la posición de registro para determinar cuánto debe retrasarse la posición de lectura. En Windows Server 2008 y sistemas operativos posteriores, el cliente envía un KSPROPERTY_AUDIO_POSITION o una solicitud de propiedad KSPROPERTY_RTAUDIO_POSITIONREGISTER para determinar la posición del registro. El último método de solicitud es más eficaz porque permite al cliente leer la posición del registro directamente sin la transición a una rutina en modo kernel para la información.