Nota
El acceso a esta página requiere autorización. Puede intentar iniciar sesión o cambiar directorios.
El acceso a esta página requiere autorización. Puede intentar cambiar los directorios.
La estructura KSAUDIO_MICROPHONE_COORDINATES especifica el tipo y las coordenadas de un solo micrófono en la matriz de micrófonos.
Sintaxis
typedef struct {
USHORT usType;
SHORT wXCoord;
SHORT wYCoord;
SHORT wZCoord;
SHORT wVerticalAngle;
SHORT wHorizontalAngle;
} KSAUDIO_MICROPHONE_COORDINATES, *PKSAUDIO_MICROPHONE_COORDINATES;
Miembros
usType
Especifica el tipo de micrófono en uso en esta ubicación de coordenadas. El valor de este miembro es uno de los KSMICARRAY_MICTYPE valores de enumeración que se muestran en la tabla siguiente.
| Valor | Tipo de micrófono |
|---|---|
| KSMICARRAY_MICTYPE_OMNIDIRECTIONAL | Omni directional |
| KSMICARRAY_MICTYPE_SUBCARDIOID | Sub cardioid |
| KSMICARRAY_MICTYPE_CARDIOID | Cardioide |
| KSMICARRAY_MICTYPE_SUPERCARDIOID | Super cardioid |
| KSMICARRAY_MICTYPE_HYPERCARDIOID | Hyper cardioid |
| KSMICARRAY_MICTYPE_8SHAPED | Con forma de 8 |
| KSMICARRAY_MICTYPE_VENDORDEFINED | 0x0F |
Si el micrófono es de tipo KSMICARRAY_MICTYPE_VENDORDEFINED, el valor debe establecerse en 0x0F. Además, los bits más significativos definirán aún más el tipo de micrófono.
wXCoord
Especifica la coordenada X firmada del micrófono, en milímetros. Los valores aceptables oscilan entre -32768 y 32767, ambos incluidos.
wYCoord
Especifica la coordenada Y firmada del micrófono, en milímetros. Los valores aceptables oscilan entre -32768 y 32767, ambos incluidos.
wZCoord
Especifica la coordenada Z firmada del micrófono, en milímetros. Los valores aceptables oscilan entre -32768 y 32767, ambos incluidos.
wVerticalAngle
Especifica un valor entre -15708 y +15708. Cuando se divide entre 10 000, proporciona una medida de ángulo radian.
wHorizontalAngle
Especifica un valor entre -31416 y +31416. Cuando se divide entre 10 000, proporciona una medida de ángulo radian.
Observaciones
Para comprender mejor las descripciones de wHorizontalAngle y wVerticalAngle, considere el siguiente diagrama:
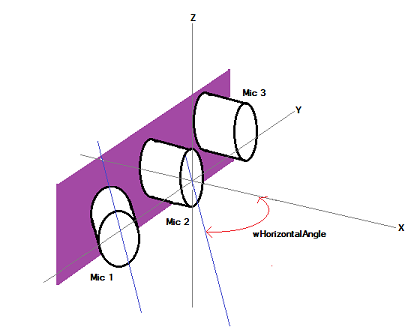
Deje que x ser el eje que apunta desde el centro de la matriz de micrófonos hacia la ubicación más probable del usuario, es decir, perpendicular a la pantalla. Positivo está hacia el usuario, negativo está detrás de la pantalla. Deje que y por el eje horizontal perpendicular al eje X, es decir, desde la izquierda de la pantalla a la derecha. Positivo es el derecho del usuario; negativo es a la izquierda del usuario. Deje que z ser el eje vertical.
Ahora supongamos que hay tres micrófonos en la matriz, como se muestra en el diagrama anterior. Además, supongamos que uno de los micrófonos (Mic 1) apunta en una dirección horizontal que no es paralela al eje X, como se indica en la línea central azul a través de Mic 1. Ahora, cuando imaginas una línea que se ejecuta a través del origen (0,0,0) del sistema de coordenadas (x,y,z) y es paralela a la línea central de Mic 1, encontrarás que hay un ángulo horizontal entre el eje X positivo y la proyección de la línea central del micrófono en el plano x-y. Este ángulo se representa mediante wHorizontalAngle.
Si uno de los micrófonos, por ejemplo, Mic 1, se coloca hacia abajo o se eleva, este micrófono también tendría un ángulo vertical entre su línea central y la proyección de su línea central en el plano x-y. Este ángulo se representa mediante wVerticalAngle.
Para obtener más información sobre cómo procesar una matriz de micrófonos en Windows, consulte las notas del producto compatibilidad con la matriz de micrófonos en Windows.
Requisitos
| Requisito | Valor |
|---|---|
| encabezado de | ksmedia.h (incluya Ksmedia.h) |