predicción de Motion-Compensated
Bloquear predicción compensada por movimiento (MCP) es el tipo de predicción implementada por DirectX VA. Este tipo de predicción es lo que proporciona a la familia MPEG y H.26x de códecs la ventaja sobre los métodos de codificación de fotogramas de fotogramas puros, como JPEG. DirectX VA no implementa tipos de predicción compensada por movimiento que no sean predicciones basadas en bloques.
En la predicción compensada por movimiento, los datos previamente transmitidos y descodificados sirven como predicción de los datos actuales. La diferencia entre la predicción y los valores de datos actuales reales es el error de predicción. El error de predicción codificada se agrega a la predicción para obtener la representación final de los datos de entrada. Después de agregar el error de predicción codificada al MCP, la imagen final descodificada se usa en el MCP para generar imágenes codificadas posteriores.
Este bucle recursivo se interrumpe ocasionalmente por varios tipos de restablecimientos que son específicos del elemento que se va a predecir. Los restablecimientos se describen mediante la semántica del proceso de descodificación. (Por ejemplo, los vectores de movimiento y las predicciones de coeficiente se restablecen en los límites del segmento, mientras que toda la cadena de predicción de fotogramas temporales se restablece mediante un marco intra-refresh).
En la ilustración siguiente se muestra el flujo de señal para la predicción compensada por movimiento.
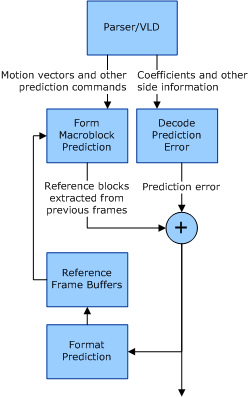
Los pasos necesarios para la codificación de predicción compensada por movimiento de imágenes son los siguientes:
Los bloques de referencia se extraen de fotogramas descodificados previamente y se modifican según lo especificado por la selección de modo codificado y los vectores de movimiento y otros comandos de predicción para formar la predicción de cada bloque de imagen.
La diferencia transformada entre el bloque de datos de entrada actual y la predicción se aproxima lo más cerca posible dentro de la velocidad de bits disponible por el codificador, y el resultado se envía como error de predicción codificada.
La predicción y el error de predicción inverso se suman para formar un bloque de imagen reconstruido.
El bloque de imagen reconstruido se almacena en un búfer de fotogramas de referencia que se usará para la predicción de imágenes posteriores.
Este proceso continúa de nuevo en el paso 1.
Los vectores de movimiento, los coeficientes dcT y otros datos que no forman parte directa del proceso mcp también emplean la predicción para hacer que la forma transmitida de los datos sea más compacta. Estas instancias de predicción se ejecutan en el procesador de CPU del host o en la unidad de descodificación bitstream/variable-length-descodificación.
Comentarios
Próximamente: A lo largo de 2024 iremos eliminando gradualmente GitHub Issues como mecanismo de comentarios sobre el contenido y lo sustituiremos por un nuevo sistema de comentarios. Para más información, vea: https://aka.ms/ContentUserFeedback.
Enviar y ver comentarios de