Nota:
El acceso a esta página requiere autorización. Puede intentar iniciar sesión o cambiar directorios.
El acceso a esta página requiere autorización. Puede intentar cambiar los directorios.
Nota:
Los tutoriales de Mixed Reality Academy se diseñaron con HoloLens (primera generación) y Mixed Reality cascos inmersivos en mente. Por lo tanto, creemos que es importante dejar estos tutoriales en su lugar para los desarrolladores que siguen buscando orientación en el desarrollo para esos dispositivos. Estos tutoriales no se actualizan con los conjuntos de herramientas más recientes o las interacciones que se usan para HoloLens 2. Se mantienen para seguir trabajando en los dispositivos compatibles. Habrá una nueva serie de tutoriales que se publicarán en el futuro que muestran cómo desarrollar para HoloLens 2. Este aviso se actualiza con un vínculo a esos tutoriales cuando se publican.
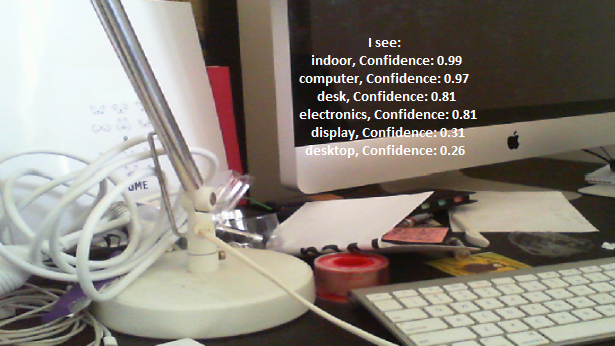
En este curso, aprenderá a reconocer el contenido visual dentro de una imagen proporcionada mediante las funcionalidades de Azure Computer Vision en una aplicación de realidad mixta.
Los resultados del reconocimiento se muestran como etiquetas descriptivas. Puede usar este servicio sin necesidad de entrenar un modelo de aprendizaje automático. Si la implementación requiere el entrenamiento de un modelo de aprendizaje automático, consulte MR y Azure 302b.
Microsoft Computer Vision es un conjunto de API diseñadas para proporcionar a los desarrolladores procesamiento y análisis de imágenes (con información de retorno), mediante algoritmos avanzados, todo desde la nube. Los desarrolladores cargan una dirección URL de imagen o imagen y los algoritmos de API de Microsoft Computer Vision analizan el contenido visual, en función de las entradas elegidas por el usuario, que luego pueden devolver información, incluida la identificación del tipo y la calidad de una imagen, la detección de caras humanas (devolver sus coordenadas) y el etiquetado o la categorización de imágenes. Para obtener más información, visite la página Azure Computer Vision API.
Después de completar este curso, tiene una aplicación HoloLens de realidad mixta, que puede:
- Con el gesto De pulsar, la cámara de HoloLens captura una imagen.
- La imagen se envía al servicio de API de Azure Computer Vision.
- Los objetos reconocidos aparecen en un grupo de interfaz de usuario simple situado en la escena de Unity.
En la aplicación, depende de usted cómo integrar los resultados con el diseño. Este curso está diseñado para enseñarle a integrar un servicio de Azure con el proyecto de Unity. Es su trabajo usar los conocimientos que obtiene de este curso para mejorar la aplicación de realidad mixta.
Compatibilidad con dispositivos
| Curso | (/previous-versions/mixed-reality/hololens-1/hololens1-hardware)HoloLens | Cascos envolventes |
|---|---|---|
| MR y Azure 302: Computer vision | ✔️ | ✔️ |
Nota:
Aunque este curso se centra principalmente en HoloLens, también puede aplicar lo que aprenda en este curso a Windows Mixed Reality cascos envolventes (VR). Dado que los cascos envolventes (VR) no tienen cámaras accesibles, necesita una cámara externa conectada a su PC. A medida que sigues con el curso, verás notas sobre los cambios que puedas necesitar para admitir cascos envolventes (VR).
Requisitos previos
Nota:
Este tutorial está diseñado para desarrolladores que tienen experiencia básica con Unity y C#. Además, los requisitos previos y las instrucciones escritas de este documento representan lo que se prueba y se comprueba en el momento de escribir (mayo de 2018). Usted es libre de usar el software más reciente, como se muestra en el artículo instalar las herramientas , aunque no se debe suponer que la información de este curso coincide perfectamente con lo que encuentra en el software más reciente de lo que se muestra a continuación.
Se recomienda el siguiente hardware y software para este curso:
- Un equipo de desarrollo, compatible con Windows Mixed Reality para el desarrollo de cascos envolventes (VR)
- Windows 10 Fall Creators Update (o posterior) con el modo desarrollador habilitado
- El SDK de Windows 10 más reciente
- Unity 2017.4
- Visual Studio 2017
- Auriculares envolventes Windows Mixed Reality (VR) o Microsoft HoloLens con el modo desarrollador habilitado
- Una cámara conectada a su PC (para el desarrollo de auriculares envolventes)
- Acceso a Internet para la configuración de Azure y la recuperación de Computer Vision API
Antes de empezar
- Para evitar problemas al compilar este proyecto, se recomienda crear el proyecto mencionado en este tutorial en una carpeta raíz o casi raíz (las rutas de acceso de carpeta largas pueden causar problemas en tiempo de compilación).
- Configure y pruebe HoloLens. Si necesita soporte técnico para configurar HoloLens, asegúrese de visitar el artículo configuración de HoloLens.
- Es una buena idea realizar la calibración y el ajuste de sensores al empezar a desarrollar una nueva aplicación HoloLens (a veces puede ayudar a realizar esas tareas para cada usuario).
Para obtener ayuda sobre calibración, siga este vínculo al artículo Calibración de HoloLens.
Para obtener ayuda sobre la optimización de sensores, siga este vínculo al artículo Optimización de sensores de HoloLens.
Capítulo 1: Portal de Azure
Para usar el servicio de API de Computer Vision en Azure, debe configurar una instancia del servicio para que esté disponible para la aplicación.
En primer lugar, inicie sesión en el portal de Azure.
Nota:
Si aún no tiene una cuenta de Azure, debe crear una. Si sigue este tutorial en una situación de aula o laboratorio, pida ayuda a su instructor o a uno de los responsables para configurar la nueva cuenta.
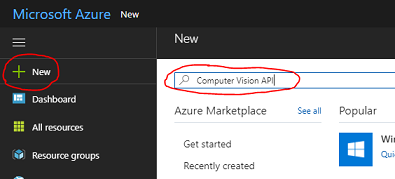
Una vez que haya iniciado sesión, haga clic en Nuevo en la esquina superior izquierda, busque Computer Vision API y haga clic en Entrar.
Nota:
La palabra Nuevo podría reemplazarse por Crear un recurso en portales más recientes.
La nueva página proporciona una descripción del servicio de API de Computer Vision. En la parte inferior izquierda de la página, seleccione el botón Crear para crear una asociación con este servicio.
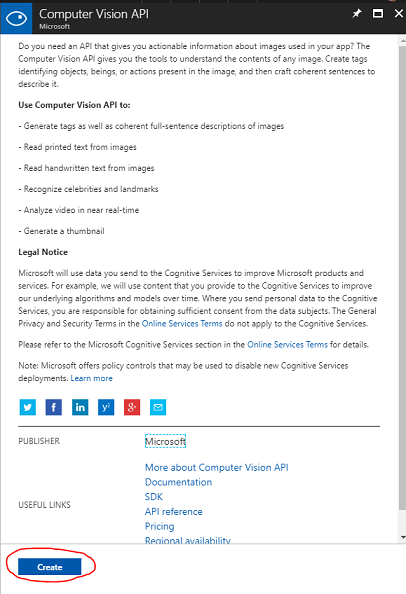
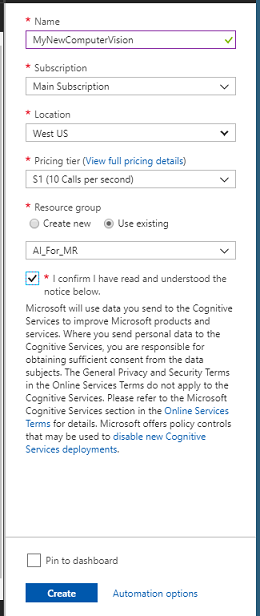
Una vez que seleccione Crear:
Inserte el nombre deseado para la instancia de servicio.
Seleccione una suscripción.
Seleccione el plan de tarifa adecuado para usted, si es la primera vez que crea un servicio de API de Computer Vision, debería estar disponible un nivel gratuito (denominado F0).
Elija un grupo de recursos o cree uno nuevo. Un grupo de recursos proporciona una manera de supervisar, controlar el acceso, aprovisionar y administrar la facturación de una colección de recursos Azure. Se recomienda mantener todos los servicios de Azure asociados a un único proyecto (por ejemplo, estos laboratorios) en un grupo de recursos común.
Si desea obtener más información sobre Azure grupos de recursos, visite el artículo del grupo de recursos.
Determine la ubicación del grupo de recursos (si va a crear un nuevo grupo de recursos). La ubicación sería ideal en la región donde se ejecutaría la aplicación. Algunos recursos Azure solo están disponibles en determinadas regiones.
También debe confirmar que comprende los Términos y condiciones aplicados a este Servicio.
Haga clic en Crear.
Una vez que seleccione Crear, tendrá que esperar a que se cree el servicio, lo que puede tardar un minuto.
Aparece una notificación en el portal una vez creada la instancia del servicio.

Haga clic en la notificación para explorar la nueva instancia de servicio.
Haga clic en el botón Ir al recurso de la notificación para explorar la nueva instancia de servicio. Se le llevará a la nueva instancia de servicio de API de Computer Vision.
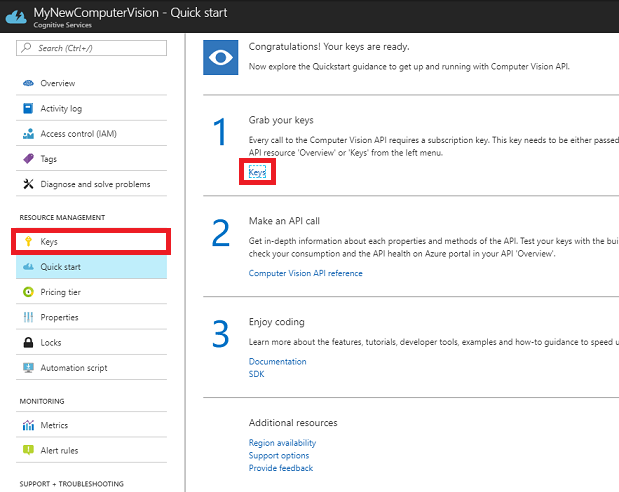
En este tutorial, la aplicación debe realizar llamadas al servicio, lo que se realiza mediante la clave de suscripción del servicio.
En la página Inicio rápido, del servicio de API de Computer Vision, vaya al primer paso, Tome las claves y haga clic en Claves (también puede hacerlo haciendo clic en el hipervínculo azul Claves, ubicado en el menú de navegación de servicios, que se indica mediante el icono de clave). Revela las claves de servicio.
Tome una copia de una de las claves mostradas, ya que la necesitará más adelante en el proyecto.
Volver a la página Inicio rápido y, desde allí, capturar el punto de conexión. Tenga en cuenta que el suyo puede ser diferente, en función de la región (que, si es así, debe realizar un cambio en el código más adelante). Realice una copia de este punto de conexión para usarlo más adelante:
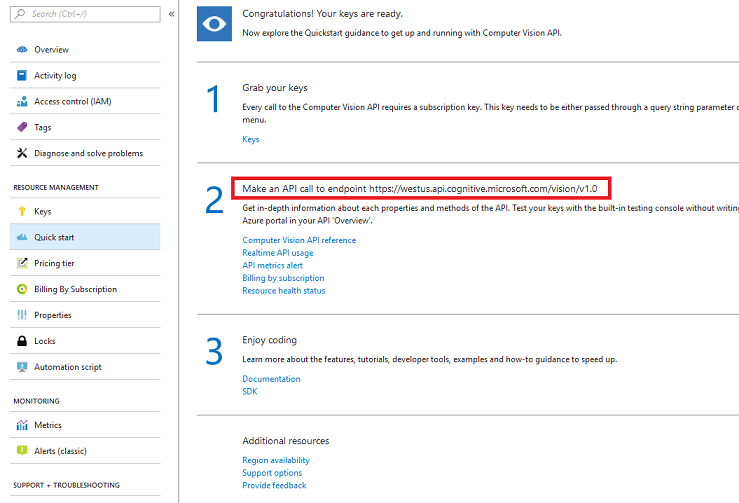
Sugerencia
Puede comprobar cuáles son los distintos puntos de conexión aquí.
Capítulo 2: Configuración del proyecto de Unity
A continuación se muestra una configuración típica para desarrollar con realidad mixta y, como tal, es una buena plantilla para otros proyectos.
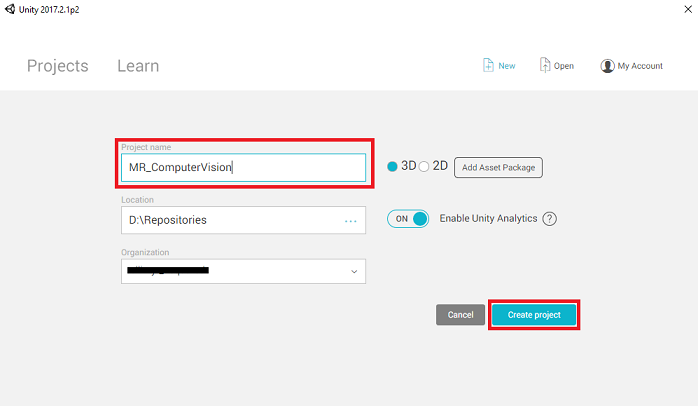
Abra Unity y haga clic en Nuevo.
Ahora debe proporcionar un nombre de proyecto de Unity. Insertar MR_ComputerVision. Asegúrese de que el tipo de proyecto está establecido en 3D. Establezca la ubicación en algún lugar adecuado para usted (recuerde que es mejor estar más cerca de los directorios raíz). A continuación, haga clic en Crear proyecto.
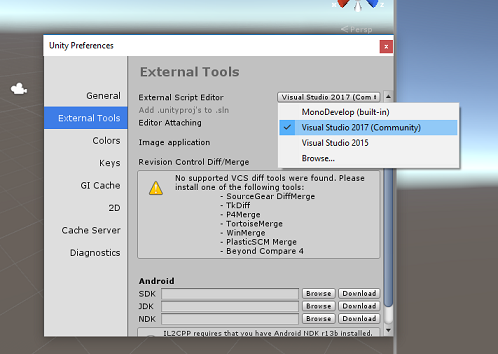
Con Unity abierto, merece la pena comprobar que el Editor de scripts predeterminado está establecido en Visual Studio. Vaya a Editar > preferencias y, a continuación, en la nueva ventana, vaya a Herramientas externas. Cambie el Editor de scripts externos a Visual Studio 2017. Cierre la ventana Preferencias .
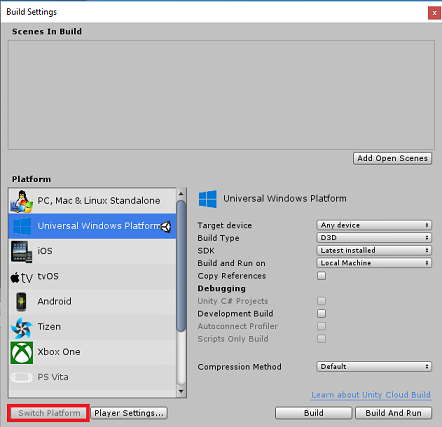
A continuación, vaya a > Configuración de compilación de archivos y seleccione Plataforma universal de Windows y haga clic en el botón Cambiar plataforma para aplicar la selección.
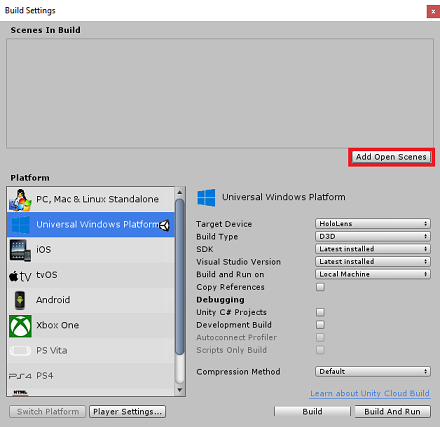
Mientras sigue en > Configuración de compilación de archivos y asegúrese de que:
El dispositivo de destino está establecido en HoloLens
Para los cascos envolventes, establezca Dispositivo de destino en Cualquier dispositivo.
Tipo de compilación se establece en D3D
El SDK está establecido en Latest installed (Instalación más reciente)
La versión de Visual Studio está establecida en Última instalación
Compilación y ejecución se establecen en Máquina local
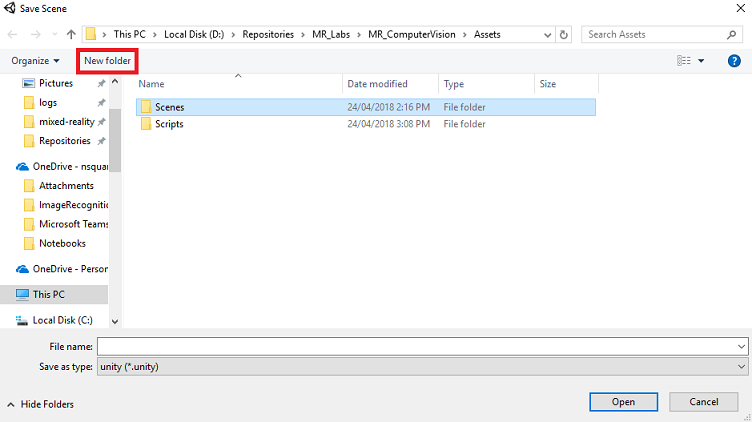
Guarde la escena y agréguela a la compilación.
Seleccione Agregar escenas abiertas. Aparece una ventana de guardado.
Cree una nueva carpeta y cualquier escena futura y, a continuación, seleccione el botón Nueva carpeta , para crear una nueva carpeta, asígnele el nombre Escenas.
Abra la carpeta Escenas recién creada y, a continuación, en el campo Nombre de archivo: texto, escriba MR_ComputerVisionScene y, a continuación, haga clic en Guardar.
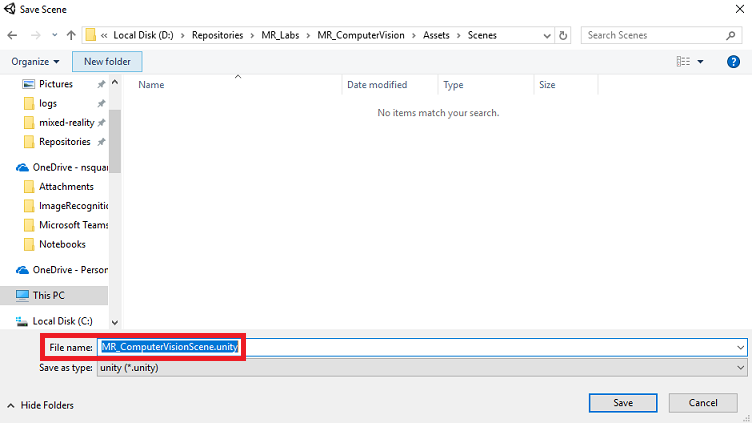
Tenga en cuenta que debe guardar las escenas de Unity en la carpeta Activos , ya que deben estar asociadas con el proyecto de Unity. Crear la carpeta de escenas (y otras carpetas similares) es una forma típica de estructurar un proyecto de Unity.
La configuración restante, en Configuración de compilación, debe dejarse como predeterminada por ahora.
En la ventana Configuración de compilación , haga clic en el botón Configuración del reproductor y se abrirá el panel relacionado en el espacio donde se encuentra el Inspector .
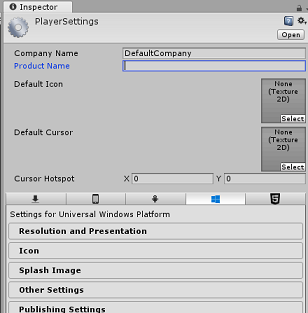
En este panel, es necesario comprobar algunos valores:
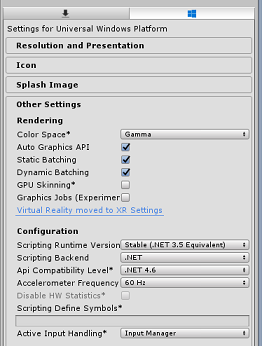
En la pestaña Otras configuraciones :
La versión del entorno de ejecución de scripting debe ser estable (equivalente a .NET 3.5).
El back-end de scripting debe ser .NET
El nivel de compatibilidad de API debe ser .NET 4.6
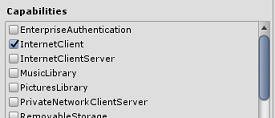
En la pestaña Configuración de publicación , en Funcionalidades, compruebe lo siguiente:
InternetClient
Webcam
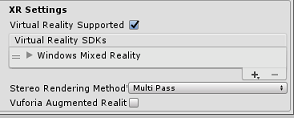
Más abajo en el panel, en Configuración de XR (que se encuentra debajo de Configuración de publicación), marque Realidad virtual compatible y asegúrese de que se agrega el SDK de Windows Mixed Reality.
De nuevo en Configuración de compilación, Los proyectos de C# de Unity ya no están atenuados; active la casilla situada junto a ella.
Cierre la ventana Configuración de compilación.
Guarde la escena y el proyecto (ARCHIVO > GUARDAR ESCENA /ARCHIVO > GUARDAR PROYECTO).
Capítulo 3: Configuración de la cámara principal
Importante
Si desea omitir el componente Configuración de Unity del curso y continuar directamente en el código, no dude en descargar .unitypackage, importarlo en el proyecto como un paquete personalizado y, a continuación, continuar desde el capítulo 5.
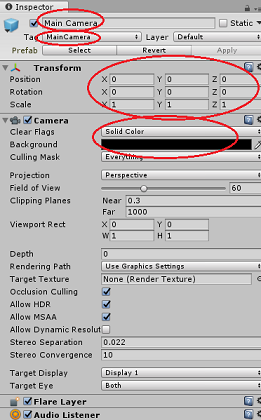
En el panel Jerarquía, seleccione la cámara principal.
Una vez seleccionado, podrá ver todos los componentes de la cámara principal en el panel inspector.
El objeto Camera debe denominarse Cámara principal (tenga en cuenta la ortografía).
La etiqueta de cámara principal debe establecerse en MainCamera (tenga en cuenta la ortografía).
Asegúrese de que la posición de transformación está establecida en 0, 0, 0.
Establezca Clear Flags en Color sólido (omita los auriculares envolventes).
Establezca el color de fondo del componente de cámara en Negro, Alfa 0 (código hexadecimal: #00000000) (omitir para casco envolvente).
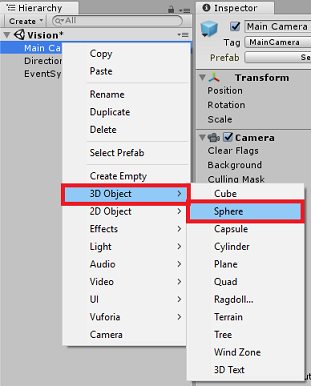
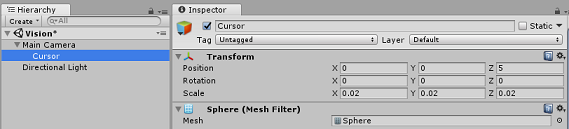
A continuación, debe crear un objeto "Cursor" simple adjunto a la cámara principal, lo que le ayuda a colocar la salida del análisis de imágenes cuando se ejecuta la aplicación. Este cursor determina el punto central del foco de la cámara.
Para crear el cursor:
En el panel Jerarquía, haga clic con el botón derecho en la cámara principal. En Objeto 3D, haga clic en Esfera.
Cambie el nombre de Sphere a Cursor (haga doble clic en el objeto Cursor o presione el botón de teclado "F2" con el objeto seleccionado) y asegúrese de que se encuentra como elemento secundario de la cámara principal.
En el panel Jerarquía, haga clic con el botón izquierdo en el cursor. Con el cursor seleccionado, ajuste las siguientes variables en el panel Inspector:
Establezca la posición de transformación en 0, 0, 5
Establezca escala en0.02, 0.02, 0.02
Capítulo 4: Configuración del sistema de etiquetas
Una vez capturada una imagen con la cámara de HoloLens, esa imagen se envía a la instancia de API Service de Azure Computer Vision para su análisis.
Los resultados de ese análisis son una lista de objetos reconocidos denominados Etiquetas.
Las etiquetas se usan (como texto 3D en el espacio mundial) para mostrar estas etiquetas en la ubicación en la que se tomó la foto.
En los pasos siguientes se muestra cómo configurar el objeto Label .
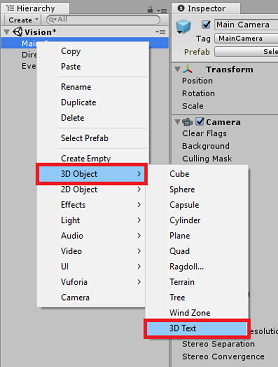
Haga clic con el botón derecho en cualquier lugar del panel Jerarquía (la ubicación no importa en este momento), en Objeto 3D, agregue un texto 3D. Asígnele el nombre LabelText.
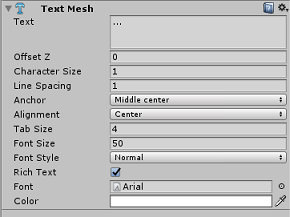
En el panel Jerarquía, haga clic con el botón izquierdo en LabelText. Con labeltext seleccionado, ajuste las siguientes variables en el panel Inspector:
- Establezca la posición en 0,0,0
- Establezca escala en0.01, 0.01, 0.01
- En el componente Text Mesh:
- Reemplace todo el texto de Text por "..."
- Establecer el delimitador en Centro intermedio
- Establecer la alineación en el centro
- Establecer el tamaño de tabulación en 4
- Establecer el tamaño de fuente en 50
- Establezca color en#FFFFFFFF
Arrastre LabelText desde el Panel de jerarquía hasta la Carpeta de recursos, dentro del Panel de proyecto. Hace que LabelText sea un objeto Prefab, de modo que se pueda crear una instancia en el código.
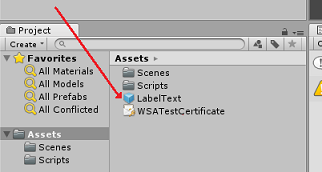
Debe eliminar LabelText del Panel de jerarquía para que no se muestre en la escena de apertura. Como ahora es un objeto prefabricado, al que se llama para instancias individuales desde la carpeta Activos, no es necesario mantenerlo dentro de la escena.
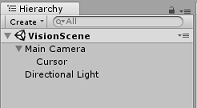
La estructura final del objeto en el panel Jerarquía debe ser similar a la que se muestra en la siguiente imagen:
Capítulo 5: Creación de la clase ResultsLabel
El primer script que debe crear es la clase ResultsLabel , que es responsable de:
- Crear las etiquetas en el espacio mundial adecuado, en relación con la posición de la cámara.
- Mostrar las etiquetas del análisis de imágenes.
Para crear esta clase:
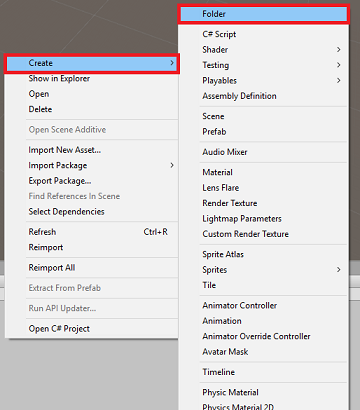
Haga clic con el botón derecho en el Panel del proyecto y luego en Crear > carpeta. Asigne a la carpeta el nombre Scripts.
Con la carpeta Scripts creada, haga doble clic en ella para abrirla. A continuación, en esa carpeta, haga clic con el botón derecho y seleccione Crear > y, después, Script de C#. Asigne al script el nombre ResultsLabel.
Haga doble clic en el nuevo script ResultsLabel para abrirlo con Visual Studio.
Dentro de la clase Class, inserte el código siguiente en la clase ResultsLabel :
using System.Collections.Generic; using UnityEngine; public class ResultsLabel : MonoBehaviour { public static ResultsLabel instance; public GameObject cursor; public Transform labelPrefab; [HideInInspector] public Transform lastLabelPlaced; [HideInInspector] public TextMesh lastLabelPlacedText; private void Awake() { // allows this instance to behave like a singleton instance = this; } /// <summary> /// Instantiate a Label in the appropriate location relative to the Main Camera. /// </summary> public void CreateLabel() { lastLabelPlaced = Instantiate(labelPrefab, cursor.transform.position, transform.rotation); lastLabelPlacedText = lastLabelPlaced.GetComponent<TextMesh>(); // Change the text of the label to show that has been placed // The final text will be set at a later stage lastLabelPlacedText.text = "Analysing..."; } /// <summary> /// Set the Tags as Text of the last Label created. /// </summary> public void SetTagsToLastLabel(Dictionary<string, float> tagsDictionary) { lastLabelPlacedText = lastLabelPlaced.GetComponent<TextMesh>(); // At this point we go through all the tags received and set them as text of the label lastLabelPlacedText.text = "I see: \n"; foreach (KeyValuePair<string, float> tag in tagsDictionary) { lastLabelPlacedText.text += tag.Key + ", Confidence: " + tag.Value.ToString("0.00 \n"); } } }Asegúrese de guardar los cambios en Visual Studio antes de volver a Unity.
De nuevo en el Editor de Unity, haga clic y arrastre la clase ResultsLabel desde la carpeta Scripts hasta el objeto Cámara principal del Panel de jerarquía.
Haga clic en la cámara principal y examine el Panel de inspectores.
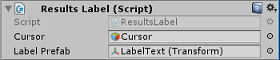
Observa que desde el script que acaba de arrastrar a la cámara, hay dos campos: Cursor y Etiqueta prefabricada.
Arrastre el objeto denominado Cursor desde el Panel de jerarquía a la ranura denominada Cursor, como se muestra en la siguiente imagen.
Arrastre el objeto denominado LabelText desde la carpeta Assets del Panel del proyecto hasta la ranura denominada Label Prefab, como se muestra en la siguiente imagen.
Capítulo 6: Creación de la clase ImageCapture
La siguiente clase que va a crear es la clase ImageCapture . Esta clase es responsable de:
- Capturar una imagen mediante la cámara de HoloLens y almacenarla en la carpeta de aplicaciones.
- Captura de gestos de pulsación del usuario.
Para crear esta clase:
Vaya a la carpeta Scripts que creó anteriormente.
Haga clic con el botón derecho dentro de la carpeta Crear > script de C#. Llame al script ImageCapture.
Haga doble clic en el nuevo script ImageCapture para abrirlo con Visual Studio.
Agregue los siguientes espacios de nombres a la parte superior del archivo:
using System.IO; using System.Linq; using UnityEngine; using UnityEngine.XR.WSA.Input; using UnityEngine.XR.WSA.WebCam;A continuación, agregue las siguientes variables dentro de la clase ImageCapture, encima del método Start():
public static ImageCapture instance; public int tapsCount; private PhotoCapture photoCaptureObject = null; private GestureRecognizer recognizer; private bool currentlyCapturing = false;La variable tapsCount almacena el número de gestos de pulsación capturados por el usuario. Este número se usa en la nomenclatura de las imágenes capturadas.
Ahora es necesario agregar código para los métodos Awake() y Start(). Se les llama cuando la clase se inicializa:
private void Awake() { // Allows this instance to behave like a singleton instance = this; } void Start() { // subscribing to the HoloLens API gesture recognizer to track user gestures recognizer = new GestureRecognizer(); recognizer.SetRecognizableGestures(GestureSettings.Tap); recognizer.Tapped += TapHandler; recognizer.StartCapturingGestures(); }Implemente un controlador al que se llame cuando se produzca un gesto de pulsación.
/// <summary> /// Respond to Tap Input. /// </summary> private void TapHandler(TappedEventArgs obj) { // Only allow capturing, if not currently processing a request. if(currentlyCapturing == false) { currentlyCapturing = true; // increment taps count, used to name images when saving tapsCount++; // Create a label in world space using the ResultsLabel class ResultsLabel.instance.CreateLabel(); // Begins the image capture and analysis procedure ExecuteImageCaptureAndAnalysis(); } }El método TapHandler() incrementa el número de pulsaciones capturadas del usuario y usa la posición cursor actual para determinar dónde colocar una nueva etiqueta.
A continuación, este método llama al método ExecuteImageCaptureAndAnalysis() para comenzar la funcionalidad principal de esta aplicación.
Una vez que se captura y almacena una imagen, se llama a los siguientes controladores. Si el proceso se realiza correctamente, el resultado se pasa al VisionManager (que aún no ha creado) para su análisis.
/// <summary> /// Register the full execution of the Photo Capture. If successful, it will begin /// the Image Analysis process. /// </summary> void OnCapturedPhotoToDisk(PhotoCapture.PhotoCaptureResult result) { // Call StopPhotoMode once the image has successfully captured photoCaptureObject.StopPhotoModeAsync(OnStoppedPhotoMode); } void OnStoppedPhotoMode(PhotoCapture.PhotoCaptureResult result) { // Dispose from the object in memory and request the image analysis // to the VisionManager class photoCaptureObject.Dispose(); photoCaptureObject = null; StartCoroutine(VisionManager.instance.AnalyseLastImageCaptured()); }A continuación, agregue el método que usa la aplicación para iniciar el proceso de captura de imágenes y almacenar la imagen.
/// <summary> /// Begin process of Image Capturing and send To Azure /// Computer Vision service. /// </summary> private void ExecuteImageCaptureAndAnalysis() { // Set the camera resolution to be the highest possible Resolution cameraResolution = PhotoCapture.SupportedResolutions.OrderByDescending((res) => res.width * res.height).First(); Texture2D targetTexture = new Texture2D(cameraResolution.width, cameraResolution.height); // Begin capture process, set the image format PhotoCapture.CreateAsync(false, delegate (PhotoCapture captureObject) { photoCaptureObject = captureObject; CameraParameters camParameters = new CameraParameters(); camParameters.hologramOpacity = 0.0f; camParameters.cameraResolutionWidth = targetTexture.width; camParameters.cameraResolutionHeight = targetTexture.height; camParameters.pixelFormat = CapturePixelFormat.BGRA32; // Capture the image from the camera and save it in the App internal folder captureObject.StartPhotoModeAsync(camParameters, delegate (PhotoCapture.PhotoCaptureResult result) { string filename = string.Format(@"CapturedImage{0}.jpg", tapsCount); string filePath = Path.Combine(Application.persistentDataPath, filename); VisionManager.instance.imagePath = filePath; photoCaptureObject.TakePhotoAsync(filePath, PhotoCaptureFileOutputFormat.JPG, OnCapturedPhotoToDisk); currentlyCapturing = false; }); }); }
Advertencia
En este momento, verá que aparece un error en el Panel de consola del Editor de Unity. Se debe a que el código hace referencia a la clase VisionManager , que creará en el siguiente capítulo.
Capítulo 7: Llamada a Azure y análisis de imágenes
El último script que debe crear es la clase VisionManager .
Esta clase es responsable de:
- Carga de la imagen más reciente capturada como una matriz de bytes.
- Enviar la matriz de bytes a la instancia de api service de Azure Computer Vision para su análisis.
- Recibir la respuesta como una cadena JSON.
- Deserialización de la respuesta y paso de las etiquetas resultantes a la clase ResultsLabel .
Para crear esta clase:
Haga doble clic en la carpeta Scripts para abrirlo.
Haga clic con el botón derecho dentro de la carpeta Scripts y haga clic en Crear > script de C#. Asigne al script el nombre VisionManager.
Haga doble clic en el nuevo script para abrirlo con Visual Studio.
Actualice los espacios de nombres para que sean los mismos que los siguientes, en la parte superior de la clase VisionManager :
using System; using System.Collections; using System.Collections.Generic; using System.IO; using UnityEngine; using UnityEngine.Networking;En la parte superior del script, dentro de la clase VisionManager (encima del método Start(), ahora debe crear dos clases que representen la respuesta JSON deserializada de Azure:
[System.Serializable] public class TagData { public string name; public float confidence; } [System.Serializable] public class AnalysedObject { public TagData[] tags; public string requestId; public object metadata; }
Nota:
Las clases TagData y AnalysedObject deben tener el atributo [System.Serializable] agregado antes de la declaración para poder deserializarse con las bibliotecas de Unity.
En la clase VisionManager, debe agregar las siguientes variables:
public static VisionManager instance; // you must insert your service key here! private string authorizationKey = "- Insert your key here -"; private const string ocpApimSubscriptionKeyHeader = "Ocp-Apim-Subscription-Key"; private string visionAnalysisEndpoint = "https://westus.api.cognitive.microsoft.com/vision/v1.0/analyze?visualFeatures=Tags"; // This is where you need to update your endpoint, if you set your location to something other than west-us. internal byte[] imageBytes; internal string imagePath;
Advertencia
Asegúrese de insertar la clave de autenticación en la variable authorizationKey . Habrá anotado su clave de autenticación al principio de este curso, capítulo 1.
Advertencia
La variable visionAnalysisEndpoint puede diferir de la especificada en este ejemplo. El oeste de EE. UU. hace referencia estrictamente a las instancias de servicio creadas para la región Oeste de EE. UU. Actualícelo con la dirección URL del punto de conexión; Estos son algunos ejemplos de cómo podría ser:
- Oeste de Europa:
https://westeurope.api.cognitive.microsoft.com/vision/v1.0/analyze?visualFeatures=Tags - Sudeste asiático:
https://southeastasia.api.cognitive.microsoft.com/vision/v1.0/analyze?visualFeatures=Tags - Este de Australia:
https://australiaeast.api.cognitive.microsoft.com/vision/v1.0/analyze?visualFeatures=Tags
Ahora es necesario agregar código para Awake.
private void Awake() { // allows this instance to behave like a singleton instance = this; }A continuación, agregue la corrutina (con el método de flujo estático debajo), que obtiene los resultados del análisis de la imagen capturada por la clase ImageCapture .
/// <summary> /// Call the Computer Vision Service to submit the image. /// </summary> public IEnumerator AnalyseLastImageCaptured() { WWWForm webForm = new WWWForm(); using (UnityWebRequest unityWebRequest = UnityWebRequest.Post(visionAnalysisEndpoint, webForm)) { // gets a byte array out of the saved image imageBytes = GetImageAsByteArray(imagePath); unityWebRequest.SetRequestHeader("Content-Type", "application/octet-stream"); unityWebRequest.SetRequestHeader(ocpApimSubscriptionKeyHeader, authorizationKey); // the download handler will help receiving the analysis from Azure unityWebRequest.downloadHandler = new DownloadHandlerBuffer(); // the upload handler will help uploading the byte array with the request unityWebRequest.uploadHandler = new UploadHandlerRaw(imageBytes); unityWebRequest.uploadHandler.contentType = "application/octet-stream"; yield return unityWebRequest.SendWebRequest(); long responseCode = unityWebRequest.responseCode; try { string jsonResponse = null; jsonResponse = unityWebRequest.downloadHandler.text; // The response will be in Json format // therefore it needs to be deserialized into the classes AnalysedObject and TagData AnalysedObject analysedObject = new AnalysedObject(); analysedObject = JsonUtility.FromJson<AnalysedObject>(jsonResponse); if (analysedObject.tags == null) { Debug.Log("analysedObject.tagData is null"); } else { Dictionary<string, float> tagsDictionary = new Dictionary<string, float>(); foreach (TagData td in analysedObject.tags) { TagData tag = td as TagData; tagsDictionary.Add(tag.name, tag.confidence); } ResultsLabel.instance.SetTagsToLastLabel(tagsDictionary); } } catch (Exception exception) { Debug.Log("Json exception.Message: " + exception.Message); } yield return null; } }/// <summary> /// Returns the contents of the specified file as a byte array. /// </summary> private static byte[] GetImageAsByteArray(string imageFilePath) { FileStream fileStream = new FileStream(imageFilePath, FileMode.Open, FileAccess.Read); BinaryReader binaryReader = new BinaryReader(fileStream); return binaryReader.ReadBytes((int)fileStream.Length); }Asegúrese de guardar los cambios en Visual Studio antes de volver a Unity.
De vuelta en el Editor de Unity, haga clic y arrastre las clases VisionManager e ImageCapture desde la carpeta Scripts hasta el objeto Cámara principal del panel Jerarquía.
Capítulo 8: Antes de la construcción
Para realizar una prueba exhaustiva de la aplicación, debe transferirla localmente a HoloLens. Antes de hacerlo, asegúrese de que:
- Todas las opciones mencionadas en el capítulo 2 se establecen correctamente.
- Todos los scripts se adjuntan al objeto Main Camera .
- Todos los campos del Panel principal del inspector de cámara se asignan correctamente.
- Asegúrese de insertar la clave de autenticación en la variable authorizationKey .
- Asegúrese de que también comprueba el punto de conexión en el script de VisionManager y que se alinea con su región (este documento usa oeste de forma predeterminada).
Capítulo 9: Compilación de la solución para UWP y transferencia local de la aplicación
Ahora se completa todo lo necesario para la sección Unity de este proyecto, por lo que es el momento de compilarlo desde Unity.
Vaya a Configuración de compilación Configuración - del archivo > Configuración de compilación....
En la ventana Configuración de compilación , haga clic en Compilar.
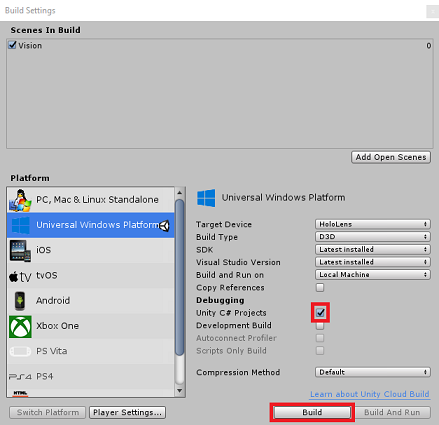
Si aún no lo ha hecho, marque Proyectos de C# de Unity.
Haga clic en Compilar. Unity inicia una ventana de Explorador de archivos en la que debe crear y, a continuación, seleccionar una carpeta en la que compilar la aplicación. Cree esa carpeta ahora y asígnele el nombre App. A continuación, con la carpeta Aplicación seleccionada, presione Seleccionar carpeta.
Unity comienza a compilar el proyecto en la carpeta App .
Una vez que Unity termina de compilar (puede tardar algún tiempo), se abre una ventana Explorador de archivos en la ubicación de la compilación (compruebe la barra de tareas, ya que puede que no aparezca siempre encima de las ventanas, pero le notifica la adición de una nueva ventana).
Capítulo 10: Implementación en HoloLens
Para implementar en HoloLens:
Necesita la dirección IP de HoloLens (para la implementación remota) y para asegurarse de que HoloLens está en modo de desarrollador. Para hacerlo:
- Mientras usa holoLens, abra la configuración.
- Vaya a Network & Internet > Wi-Fi > Opciones avanzadas
- Anote la dirección IPv4 .
- A continuación, vuelva a Configuración y, a continuación, a Actualizar & seguridad > para desarrolladores.
- Establezca el modo de desarrollador activado.
Vaya a la nueva compilación de Unity (la carpeta Aplicación ) y abra el archivo de solución con Visual Studio.
En Configuración de la solución, seleccione Depurar.
En plataforma de soluciones, seleccione x86, Máquina remota.
Vaya al menú Compilar y haga clic en Implementar solución para transferir localmente la aplicación a HoloLens.
La aplicación debería aparecer ahora en la lista de aplicaciones instaladas en HoloLens, ¡lista para iniciarse!
Nota:
Para realizar la implementación en cascos envolventes, establezca la Plataforma de soluciones en Máquina local y establezca La configuración en Depurar, con x86 como plataforma. A continuación, implemente en la máquina local, con el menú Compilar y seleccione Implementar solución.
La aplicación de API Computer Vision finalizada
Enhorabuena, ha creado una aplicación de realidad mixta que aprovecha la API de Azure Computer Vision para reconocer objetos del mundo real y mostrar la confianza de lo que se ve.
Ejercicios de bonificación
Ejercicio 1
Al igual que usó el parámetro Tags (como se muestra en el punto de conexión usado en VisionManager), amplíe la aplicación para detectar otra información; echa un vistazo a qué otros parámetros tiene acceso a HERE.
Ejercicio 2
Muestre los datos Azure devueltos, de una manera más conversacional y legible, quizás ocultando los números. Como si un bot estuviera hablando con el usuario.