Nota
El acceso a esta página requiere autorización. Puede intentar iniciar sesión o cambiar directorios.
El acceso a esta página requiere autorización. Puede intentar cambiar los directorios.
- información general
- arquitectura de perfil de modelo de mapa de gamut
- generación de del límite de gama
- la de esquema GMMP
- los elementos de esquema GMMP
- gamutMapModel
- los algoritmos de línea base gmMP
-
alinear los ejes neutros
- diferencia mínima de color (MinCD)
- BasicPhoto
- información general
- caso de de shell de una sola gama
- de mejora negra
- caso de shells de doble gama
- Razones para los cambios de las recomendaciones CIE TC8-03
- de asignación de Hue
-
descripción de límites de gamut y algoritmos de shell de gamut
- triangulación del límite de gamut
- elementos de línea de límite
- operación de gama: CheckGamut
- plano de hue completo: intersección
- operación de gama: checkGamut (continuación)
- de asignación mínima de diferencia de color
- de suavizado de hue
- establecer los elementos principales y los secundarios en la descripción del límite de gamut
- Establecer el eje neutro en la descripción del límite de gama
- temas relacionados
Visión general
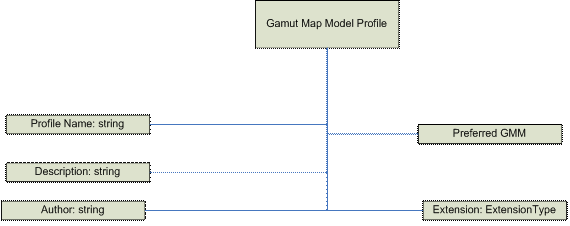
Este esquema se usa para especificar el contenido de un perfil de modelo de mapa de gama (GMMP). Los algoritmos de línea base asociados se describen en el tema siguiente.
El esquema GMMP básico consta de información de encabezado común, una referencia opcional a un complemento modelo de mapa de gamut preferido y etiquetas de extensión.
Además, GMMP proporciona información explícita sobre el modelo de mapa de gamut de destino y proporciona una directiva en el modelo de asignación de gamut de reserva de línea base para usarlo si el modelo de destino no está disponible. El esquema puede incluir información de extensión privada, pero no incluirá ninguna otra información extraña.
Arquitectura del perfil del modelo de mapa de gamut
El muestreo del espacio de colorante del dispositivo de salida se realiza iterando a través de los colorantes de 0,0 a 1,0 con un paso fraccionario, acumulando todas las combinaciones de cada colorante en cada paso y, a continuación, convirtiéndolas del espacio de color del dispositivo al espacio de apariencia de color mediante el método DM::D eviceToColorimetricColors seguido del método CAM::ColorimetricToAppearanceColors. A continuación se muestra un ejemplo de cómo se hace para RGB.
For (red= 0.0; red <= 1.0; red += redStep) {
For (green = 0.0; green <= 1.0; green += greenStep) {
For (blue = 0.0; blue <= 1.0; blue += blueStep) {
Colorants[0] = red; colorants[1] = green; colorants[2] = blue;
pRGBDM->DeviceToColorimetricColors(1, colorants, &XYZ);
pCAM->ColorimetricToAppearanceColors(1, &XYZ, &JCh);
}
}
}
Generación del límite de gamut
Hay tres componentes para el límite de la gama: las principales, las muestras neutras y los shells. Las principales se generan tomando las principales del dispositivo y aplicando la transformación DeviceToColorimetric/ColorimetricToAppearance. Las muestras neutras se generan mediante el muestreo del espacio de coloración del dispositivo en el área neutra y la aplicación de la misma transformación. Para tres dispositivos coloreados (RGB o CMY), las muestras neutras se definen como tener todos los colorantes iguales, por ejemplo, R == G == B. Para CMYK, las muestras neutras se definen como tener C == M == Y == 0.
Los factores que influyen en los datos usados para crear el límite de la gama son los ejemplos de datos (solo dispositivos de línea base) y las condiciones de visualización. El tamaño del paso usado para realizar el muestreo completo del espacio de colorante (para monitores y para shells creíbles) es una constante interna y no está disponible para la manipulación externa. Cambiar las condiciones de visualización cambia el comportamiento del modelo de apariencia de color (CAM) y modifica la forma del límite de la gama, por lo que debe generar un límite de gama asociado al perfil de condiciones de visualización. Si se usan datos de ejemplo, como en el caso de impresoras de línea base y dispositivos de captura, las muestras tendrán mucho impacto en la forma de la gama de referencia y afectarán al comportamiento del propio modelo.
En el caso de los dispositivos de entrada, como cámaras y escáneres, se usan diferentes muestreos para generar el shell de referencia y el shell creíble. El shell de referencia se genera a partir de las medidas usadas para inicializar el modelo de dispositivo. El shell creíble se genera de forma similar a la ilustración anterior de los dispositivos de salida. La diferencia es que cuando se introduce un destino típico, no se obtienen valores totalmente saturados (donde R, G o B = 255). Debe extrapolar el uso del modelo de dispositivo para calcular esos valores.
Esquema GMMP
<?xml version="1.0" encoding="UTF-8"?>
<xs:schema
xmlns:gmm="http://schemas.microsoft.com/windows/2005/02/color/GamutMapModel"
xmlns:wcs="http://schemas.microsoft.com/windows/2005/02/color/WcsCommonProfileTypes"
targetNamespace="http://schemas.microsoft.com/windows/2005/02/color/GamutMapModel"
xmlns:xs="http://www.w3.org/2001/XMLSchema"
elementFormDefault="qualified"
attributeFormDefault="unqualified"
blockDefault="#all"
version="1.0">
<xs:annotation>
<xs:documentation>
Gamut Map Model profile schema.
Copyright (C) Microsoft. All rights reserved.
</xs:documentation>
</xs:annotation>
<xs:import namespace="http://schemas.microsoft.com/windows/2005/02/color/WcsCommonProfileTypes" />
<xs:element name="GamutMapModel">
<xs:complexType>
<xs:sequence>
<xs:element name="ProfileName" type="wcs:MultiLocalizedTextType"/>
<xs:element name="Description" type="wcs:MultiLocalizedTextType" minOccurs="0"/>
<xs:element name="Author" type="wcs:MultiLocalizedTextType" minOccurs="0"/>
<xs:element name="DefaultBaselineGamutMapModel">
<xs:simpleType>
<xs:restriction base="xs:string">
<xs:enumeration value="HPMinCD_Absolute"/>
<xs:enumeration value="HPMinCD_Relative"/>
<xs:enumeration value="SGCK"/>
<xs:enumeration value="HueMap"/>
</xs:restriction>
</xs:simpleType>
</xs:element>
<xs:element name="PlugInGamutMapModel" minOccurs="0">
<xs:complexType>
<xs:sequence>
<xs:any namespace="##other" processContents="skip"
minOccurs="0" maxOccurs="unbounded" />
</xs:sequence>
<xs:attribute name="GUID" type="wcs:GUIDType" use="required"/>
</xs:complexType>
</xs:element>
</xs:sequence>
<xs:attribute name="ID" type="xs:string" use="optional" />
</xs:complexType>
</xs:element>
</xs:schema>
Elementos de esquema GMMP
GamutMapModel
Este elemento es una secuencia de los siguientes sub elementos:
- Cadena ProfileName,
- DefaultBaselineGamutMapModel,
- Cadena de descripción opcional,
- Cadena de autor opcional,
- PlugInGamutMap opcional y
- ExtensionType opcional.
condiciones de validación : cada sub-elemento se valida por su propio tipo.
Namespace
xmlns:gmm="http://schemas.microsoft.com/windows/2005/02/color/GamutMapModel"
targetNamespace="http://schemas.microsoft.com/windows/2005/02/color/GamutMapModel"
Versión
Versión "1.0" con la primera versión de Windows Vista.
condiciones de validación : 1.0 en Windows Vista. Las versiones <2.0 también son válidas para admitir cambios no importantes en el formato.
Documentación
Esquema de perfil de modelo de mapa de gamut.
Copyright (C) Microsoft. Todos los derechos reservados.
condiciones de validación : cada sub-elemento se valida por su propio tipo.
Tipo DefaultBaselineGamutMapModel
Tipo UINT
Valores de enumeración:
- "MinCD\_Absolute" "MinCD\_Relative" "SIG\_KNEE" "HueMap"
condiciones de validación : los valores deben coincidir con una de las enumeraciones anteriores.
PlugInGamutMapType
Este elemento es una secuencia de un GUID GUIDType y cualquier sub elementos.
condiciones de validación : el GUID se usa para coincidir con el GUID de la DLL de PlugIn de GMM. Hay un máximo de 100 000 subelementos personalizados.
ExtensionType
Este elemento es una secuencia opcional de cualquier sub elementos.
condiciones de validación : puede haber un máximo de 100 000 subelementos.
Algoritmos de línea base de GMMP
Alineación de los ejes neutros
La mayoría de los algoritmos de asignación de gama tienen un objetivo de asignar el eje neutro del dispositivo de origen al eje neutro del dispositivo de destino: es decir, blanco va a blanco, negro a negro y gris a gris. Esto se aborda en parte mediante el escalado de la ligereza de los colores de origen para que coincida con el intervalo de luz del dispositivo de destino. Pero eso no soluciona completamente el problema.
Es una propiedad física de la mayoría de los dispositivos de imágenes que la cromática del blanco del dispositivo no coincide exactamente con la cromática del dispositivo negro. Por ejemplo, el monitor blanco depende de la suma de las cromáticas y las luminarias relativas de las tres principales, mientras que el monitor negro depende de la reflectancia de la superficie de visualización. El blanco de la impresora depende de la cromática del papel, mientras que la impresora negra depende de la tinta o el tóner utilizado. Un modelo de apariencia que asigna el blanco del dispositivo exactamente al eje neutro del espacio de apariencia (cromática exactamente igual a cero) no asignará el dispositivo negro al eje neutro. Dado que el ojo es más sensible a las diferencias cromáticas a medida que aumenta la luz, los grises medio se representarán como aún más cromáticos que el negro del dispositivo. (La figura 1 muestra la curvatura de los ejes neutros en dos dimensiones. De hecho, los ejes neutros forman una curva más compleja en tres dimensiones).
Aunque el CAM predice que estos colores neutros del dispositivo aparecerán cromáticos, los observadores reales parecen compensar esto. La mayoría de las personas no consideran que estos valores neutros del dispositivo sean cromáticos. Para la mayoría de los modelos de asignación de gamut, por lo tanto, debe seguir asignando neutrales de origen a los neutros del dispositivo.
Para asignar neutrales de origen a neutrales del dispositivo, ajuste los límites de gama de origen y destino y cada píxel al aplicar el algoritmo de asignación de gama. En primer lugar, ajuste cada valor en el color de origen para que el eje neutro del dispositivo de origen en el color de origen caiga directamente en el eje neutro del espacio de apariencia. (Vea el lado izquierdo de la figura 1). A continuación, ajuste la descripción del límite de gama del dispositivo de destino para que cada color del eje neutro del dispositivo de destino en el color de límite de gama del dispositivo de destino caiga directamente en el eje neutro del espacio de apariencia. (Vea el lado derecho de la figura 1).
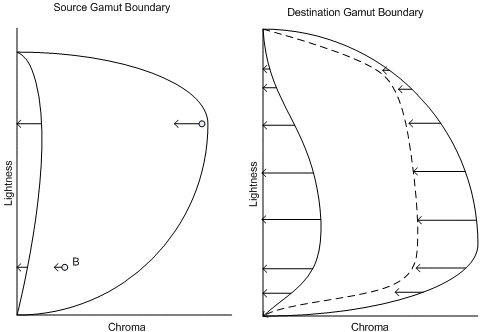
Figura 1 : Alineación de los ejes neutros ilustrados. Izquierda: ajuste los puntos de origen en relación con el eje neutro del dispositivo de origen. Derecho: ajuste la descripción del límite de gama de destino en relación con la descripción del límite de gama de destino.
Tenga en cuenta que ajusta cada valor de píxel de origen en relación con el eje neutro en ese valor de ligereza. Esto garantiza que los neutrales del dispositivo de origen caerán en el eje neutro del modelo de apariencia. También se desplazan todos los demás colores en esa ligereza por la misma cantidad, de modo que no haya discontinuidades en la representación de la gama de origen. Tienes que cambiar por diferentes cantidades en diferentes niveles de luz, ya que los neutrales del dispositivo de origen no se representan como igual de cromáticos en los diferentes niveles de luz. Claramente, esto no es una transformación trivial.
Controlar los valores del dispositivo de destino es un poco más complicado. Inicialmente, ajusta todo el límite de gama de destino de forma similar, pero en relación con el eje neutro del dispositivo de destino. Esto se ilustra en la figura 1 del lado derecho. Ese ajuste garantiza que los valores grises de origen se asignarán a los valores grises de destino. Este es el espacio en el que funcionan los algoritmos de asignación de la gama.
Sin embargo, este espacio no describe con precisión el comportamiento verdadero del dispositivo de destino. Debe invertir la asignación antes de que los colores asignados a la gama se entreguen al modelo de apariencia y al modelo de dispositivo de destino. Se desplazan todos los valores asignados por lo contrario del desplazamiento aplicado anteriormente al eje neutro del dispositivo de destino. Esto asigna el eje neutro de destino al valor representado originalmente por el CAM. Hace lo mismo para el límite de la gama y todos los valores intermedios.
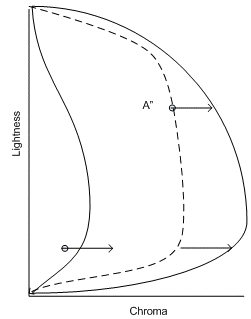
Figura 2 : Deshacer la alineación del eje neutro del dispositivo de destino
Diferencia mínima de color (MinCD)
Diferencias mínimas de color (MinCD) Versiones relativas y absolutas, equivalentes a la intención colorimétrica ICC.
Nota
El MinCD GMM es adecuado para asignar gráficos y arte de línea que contiene colores de "logotipo" (colores puntuales), degradados de color de logotipo con algunos colores fuera de gama y para la fase final de transformaciones de corrección. Aunque el MinCD GMM podría usarse para imágenes fotográficas que están completamente dentro de la gama de destino, no se recomienda para la representación general de imágenes fotográficas. La asignación de colores fuera de gama a colores en la superficie de la gama de destino puede dar lugar a artefactos no deseados, como irregularidades de tono o cromáticas en degradados suaves que cruzan el límite de la gama. BasicPhoto se recomienda para imágenes fotográficas. Si una imagen fotográfica o contona requiere una asignación de gama distinta de BasicPhoto, la alternativa debe ser crear un complemento GMM que implemente esa asignación, en lugar de usar MinCD.
Los colores en la gama se dejan sin cambios. Para los colores fuera de la gama, la luz y el cromático se ajustan al encontrar el punto en la gama de destino que tiene la distancia de color mínima desde los puntos de entrada fuera de la gama. La distancia de color se calcula en el espacio JCh. Sin embargo, se pondera la distancia en ligereza (J) y la distancia en cromática (C) o matiz (h) de forma diferente. Una función de peso dependiente del cromático se utiliza para la distancia en ligereza para que el peso sea más pequeño para un cromático pequeño y mayor para un cromático grande hasta que se alcance un cromático umbral, después del cual el peso permanece a 1, es decir, el mismo peso que la distancia en cromática o matiz. Esto sigue el uso recomendado para CMC y CIEDE2000. Hay dos variantes: colorimétrica relativa y colorimétrica absoluta.
colorimétrica relativa: Primero, alinee los ejes neutros de origen y destino, tal como se ha descrito anteriormente. A continuación, recorte el color de origen ajustado al límite de gama de destino ajustado. (Vea la figura 4. Asignación cromática a lo largo de la ligereza constante). Reajuste los valores del dispositivo de destino como se ha descrito anteriormente. En el caso de un límite de gama de destino monocromático, el recorte cromático significa que el valor cromático (C) se establece en cero (0,0).
Colorimetric Absoluto: Es similar a la colorimétrica relativa, pero sin la alineación del eje neutro de origen y destino. El valor de origen se recorta directamente en el eje neutro de destino. Tenga en cuenta que si los límites de gama de origen y destino son monocromáticos, el comportamiento es idéntico a la variante colorimétrica relativa; es decir, se realiza la alineación de ejes neutros y, a continuación, el cromático se recorta a cero. Esto garantiza que se alcance una salida razonable incluso si los medios y colorantes son significativamente diferentes.
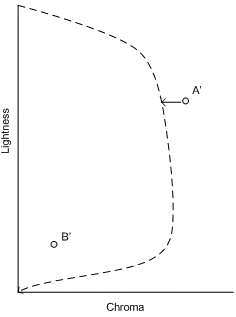
Figura 3: Recorte de MinCD en la gama ajustada
BasicPhoto
Visión general
BasicPhoto: equivalente a la intención preferida de icc, pictorial o perceptual.
Este algoritmo es una variante de la asignación de luz sigmoidal dependiente del cromático y el escalado de rodillas cusp (SGCK) descrito por CIE TC8-03 en CIE156:2004. Este algoritmo variant admite descriptores de límite de gama (GBD) con shells de doble gama; es decir, GBD con un shell de referencia y un shell creíble. El algoritmo SGCK, que originalmente asume solo un shell de gama en el GBD, se basa en el algoritmo de SIG_KNEE (Braun 1999), que incorpora la asignación de luz sigmoidal y el escalado de función de rodilla propuesto por Braun y Fairchild (1999), combinado con la dependencia cromática de GCUSP (Morovic, 1998). Mantiene constante de tono percibido, por ejemplo, ángulo de tono en Jab corregido por matiz, y usa un escalado de luz sigmoidal genérico (independiente de la imagen), que se aplica de forma dependiente de la cromática y un 90 % de función de rodilla cromática. La variante se escala a lo largo de líneas de ligereza constante.
El caso de shell de una sola gama
Resulta útil revisar el algoritmo en el caso de que los GBD de origen y destino solo tengan un shell de gama. En este caso, el algoritmo consta de los siguientes cálculos.
En primer lugar, realice la asignación de ligereza inicial con la fórmula siguiente:
 (1)
(1)
donde Jₒ es la ligera original y JR es la luz de reproducción.
 (2)
(2)
Cuando el límite de la gama de origen es monocromo, el valor cromático será cero para el límite monocromo debido a la alineación del eje neutro. Esto dará como resultado el caso degenerado en el que C es igual a cero. En este caso, p C se establece en 1.
pC es un factor de ponderación dependiente de la cromática (Morovic, 1998) que depende del cromático del color original, C y JS son el resultado de la luz original que se asigna mediante una función sigmoidal.
Para calcular JS (Braun y Fairchild, 1999), una tabla de búsqueda unidimensional (LUT) entre los valores de luz original y de reproducción se configura primero sobre la base de una función normal acumulativa discreta (S).
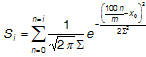 (3)
(3)
donde x ₀ y S son la media y desviación estándar de la distribución normal respectivamente y i = 0,1,2... m,m es el número de puntos utilizados en el LUT. Si es el valor de la función normal acumulativa para i /m percent. Los parámetros dependen de la ligereza del punto negro de la gama de reproducción y se pueden interpolar desde la tabla 1. Para obtener más información sobre cómo calcular estos parámetros, consulte Braun y Fairchild (1999, p. 391).
minOut de J
5.0
10.0
15,0
20.0
x ₀
53.7
56.8
58.2
60.6
S
43.0
40.0
35,0
34,5
tabla 1: Cálculo del parámetro de compresión BasicPhoto lightness
Para usar S como asignación de luz LUT (S LUT ) primero debe normalizarse en el intervalo de luz de [0,100]. A continuación, los datos normalizados se escalan en el intervalo dinámico del dispositivo de destino, como se muestra en la ecuación 4, donde Jmin\ Out y Jmax\ Out son los valores de ligereza del punto negro y el punto blanco del medio de reproducción, respectivamente.
 (4)
(4)
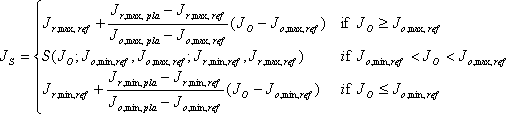
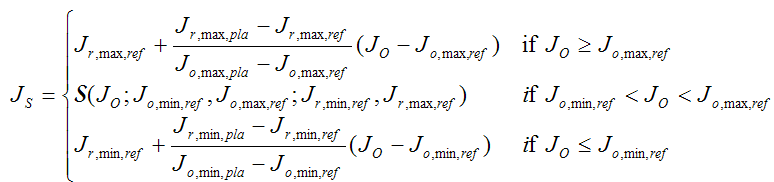
En este punto, los valores J S se pueden obtener de la LUT de S mediante la interpolación entre los puntos de m de correspondientes J O y J S que contiene y usando la siguiente ecuación como entrada.
 (5)
(5)
J minIn es el valor de ligereza del punto negro del medio original, J maxIn es el valor de ligereza del punto blanco del medio original y J O es la ligereza original. Para una referencia posterior, puede indicarlo S la función sigmoidal definida de la manera que acaba de definir, como se muestra en la figura 4 siguiente.
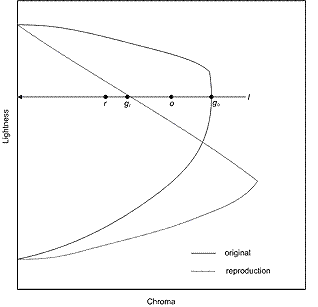
Figura 4: Asignación cromática a lo largo de la ligereza constante
En segundo lugar, si el límite de la gama de destino es cromático, comprima el cromático a lo largo de líneas de ligereza constante (l) y realice la compresión como se indica a continuación.
 (6)
(6)
donde d representa la distancia desde E en l;g representa el límite de gama media; r representa la reproducción; y o la figura 5 original.
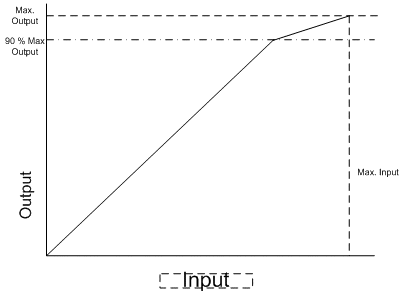
Figura 5: Compresión cromática y ligera en BasicPhoto
Si el límite de la gama de destino es monocromo, el valor cromático se recorta a cero.
En tercer lugar, use un clip minCD (descrito anteriormente) para eliminar cualquier error residual.
Mejora negra
El algoritmo anterior se puede modificar para mejorar el negro cuando el destino es un dispositivo de impresora. El problema tiene que ver con la elección de JminOut, que normalmente no se corresponde con el color más oscuro que puede producir una impresora.
Más concretamente, el color con mayor densidad, obtenido colocando 100% tintas (o cobertura máxima posible, si la limitación de GCR/tinta está en vigor), normalmente no es "neutral" en el espacio de apariencia de color. Vea la figura 6. En otras palabras, si se usa la ligereza mínima neutra para el dispositivo de destino, el escalador de ligereza construido se asignará a una ligereza mínima que no es la densidad más alta que la impresora puede lograr. Considere el caso de uso adicional del monitor a la impresora. El monitor negro, R=G=B=0, se imprimirá como no la densidad más alta. El impacto en la calidad de la imagen es que hay una falta de profundidad y contraste.
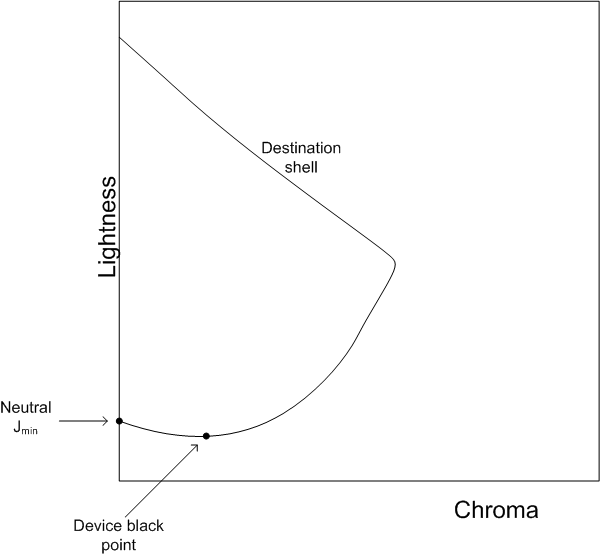
figura 6: el punto negro del dispositivo puede ser más oscuro que la luminosidad mínima neutra.
Supongamos que el destino "punto negro del dispositivo" es Jkakbk/JkCkh k. Si C k no es cero, el punto negro del dispositivo no es neutro en relación con CAM02. Si utiliza J k para el destino "ligereza mínima neutra" en la construcción del escalador de ligereza; es decir, establecer
JminOut = Jk
y aplíquelo al shell de gama de origen, obtendrá la configuración que se muestra en la figura 7. En la figura, el plano de matiz corresponde a h k.
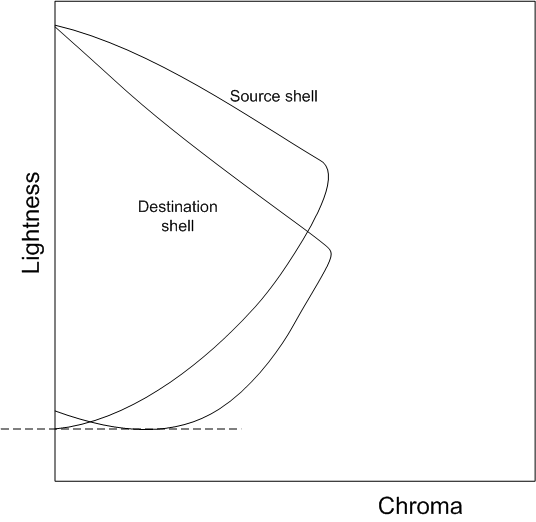
Figura 7 : Geometría mediante el escalador de luz modificado con el punto negro del dispositivo de destino
Para permitir que el algoritmo de compresión cromática posterior continúe, desea alinear las ligerezas máximas y mínimas en los shells de origen y destino. Esto se puede lograr ajustando el shell de destino entre J neutralMin y J k cambiando puntos a la izquierda. Además, esta transformación debe aplicarse en todo el espacio Jab, no solo el plano de matiz correspondiente a h k.
La transformación es

En la figura 8 se muestra el efecto de la transformación.
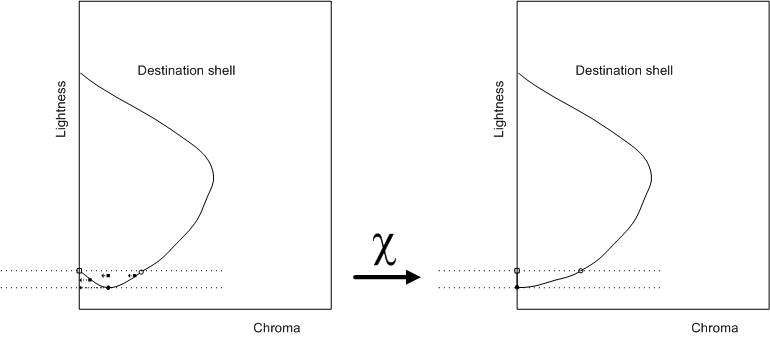
Figura 8 : Geometría mediante el escalador de luz modificado con el punto negro del dispositivo de destino
Después de aplicar el algoritmo de compresión cromática habitual, el punto debe ser "desplazado hacia atrás", es decir, la transformación inversa debe aplicarse para obtener el color asignado final.
El caso de shells de doble gama
El objetivo es generalizar SIG_KNEE para el shell de una sola gama en caso de que el dispositivo de origen GBD o el DISPOSITIVO de destino GBD tenga una estructura de dos shells. El shell interno se llamará el Shell de referencia, mientras que el shell externo se denominará Shell Desaperible. Desea tener en cuenta los siguientes casos.
(a) Tanto el GBD de origen como el GBD de destino tienen una estructura de dos shells.
(b) El GBD de origen tiene una estructura de dos shells; el GBD de destino solo tiene un shell.
(c) El GBD de origen solo tiene un shell; el GBD de destino tiene una estructura de dos shells.
(d) Tanto el GBD de origen como el GBD de destino tienen solo un shell.
El caso (d) es el caso del shell de una sola gama que se ha analizado anteriormente. En los casos (a), (b) y (c), puede generalizar el escalado de la ligereza para usar la información adicional de la estructura de doble shell. En los casos (b) y (c) en los que el origen o el destino tienen solo un shell, se introduce un "shell de referencia inducido", que se analizará en una sección posterior, "Shell de referencias inducidas". El algoritmo general de dos shells se describirá para mayúsculas y minúsculas (a). Una vez que se explica la construcción del shell de referencia inducida, el algoritmo también se puede aplicar al caso (b) y (c). En cuanto a la compresión cromática, la relación de compresión estará determinada por las carcasas más grandes disponibles. En otras palabras, si están disponibles el Shell De Referencia y el Shell de Referencia, se usará el Shell Desafiar; De lo contrario, se usará el Shell de referencia.
de escalado generalizado de la ligereza
La existencia de dos shells para GBD de origen y destino significa que debe asignar un conjunto de cuatro puntos del GBD de origen a un conjunto correspondiente en el GBD de destino.

Los subíndices tienen los significados siguientes.
o o r: "original" (origen) o "reproducción" (destino)
min o max: ligereza neutra mínima o ligereza neutra máxima
pla o ref: Shell o Shell de referencia creíble
La ordenación en cada cuádruple también es la magnitud relativa esperada de estos puntos.
El mapa de reescalamiento de ligereza usa las dos primeras ecuaciones que el shell único, pero J S se define de una manera por partes como se indica a continuación.
 (7)
(7)
En otras palabras, es sigmoidal dentro del shell de referencia y lineal fuera. Vea la figura 9.
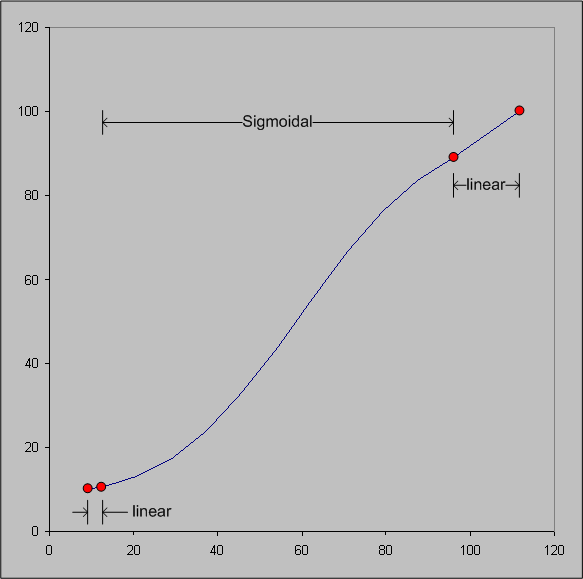
Figura 9: Función de escalado de ligereza para GBD de dos shells
SHELL DE REFERENCIADUCIDA
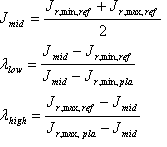
Cuando un GBD tiene un shell y el otro GBD tiene dos shells, debe crear un "Shell de referencia" para el GBD con solo un shell. El shell existente, al que se llamaría Shell de referencia, se cambiará al "Shell creíble". De hecho, no tienes que crear un shell en el espacio de Jab completo. Dado que el escalado de ligereza solo usa J max y J min, solo tiene que componer estos valores para el Shell de referencia inducido. Hay dos casos, dependiendo de qué GBD tiene dos shells.
Caso 1: El GBD de origen tiene dos shells; destination GBD tiene un shell.
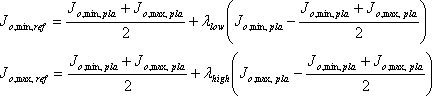
Determine el shell de referencias de destino inducido en el eje neutro; es decir, el de referencia de J r,\ min,\ y J r,\ max,\ ref del shell. Esto se hace mediante el siguiente algoritmo.
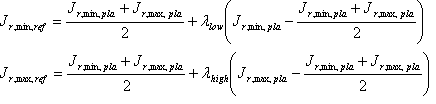
¿Los factores? bajos y ? alto controlar la separación entre el Shell Desagregación y el Shell de referencia. Un valor de 1 significa que los valores de J min o J mₐₓ valores coinciden. Sus valores son "inducidos" desde el Shell de referencia de origen y el Shell De referencia de origen.
Los "factores de fudge" F baja y F alto son parámetros ajustables que deben estar entre 0 y 1. Si el valor es 0, el J min o J mₐₓ se deducen directamente de los shells de origen. En este caso, elija F bajo = 0,95 y F alto = 0,1.
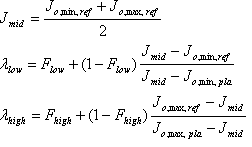
Caso 2: El GBD de origen tiene un shell; destination GBD tiene dos shells.
Determine el shell de referencia de origen inducido en el eje neutro; es decir, J o,\ min,\ ref y J o,\ max,\ ref del shell. Esto se hace mediante el siguiente algoritmo.
¿De nuevo, los factores? bajos y ? alto controlar la separación entre el Shell De Referencia y el Shell de Referencia. Un valor de 1 significa que los valores de J min o J mₐₓ coinciden. Sus valores son "inducidos" del shell de referencia de origen y del shell de origen Desafiráctico:
Razones para los cambios de las recomendaciones de CIE TC8-03
BasicPhoto difiere de las recomendaciones de CIE TC8-03 de las siguientes maneras.
- El cromático no se comprime hacia la cúspide, sino a lo largo de líneas de ligereza constante.
- El intervalo de luz usa la luminosidad del color más oscuro en la gama en lugar del punto en el que el límite de la gama cruza el eje neutro.
- BasicPhoto admite tanto un shell de gama de referencia como un shell de gama verosímil, si cualquiera de los límites de gama de la transformación tiene dos shells.
- BasicPhoto usa CIECAM02; en lugar de usar CIECAM97s para convertir a D65 a 400 cd/m2 y, a continuación, usar el espacio de color IPT RIT.
El primer cambio se realizó para evitar problemas de inversión de tono que pueden producirse al usar la compresión hacia una cusp. Como se muestra en la figura 10, la compresión cusp puede provocar inversiones de tono. Esto puede ocurrir cuando los colores de alta cromática son más claros que los colores de cromática inferior. Dado que SGCK comprime cada píxel de forma independiente tanto en la luz como en el cromático, no se garantiza que conserve la relación de ligereza entre los valores de píxeles después de la compresión. La desventaja conocida de esta decisión de comprimir en líneas de ligereza constante es que puede sufrir pérdidas de cromática, en particular en áreas donde el límite de la gama de destino es muy plano, como sucede con amarillos brillantes.
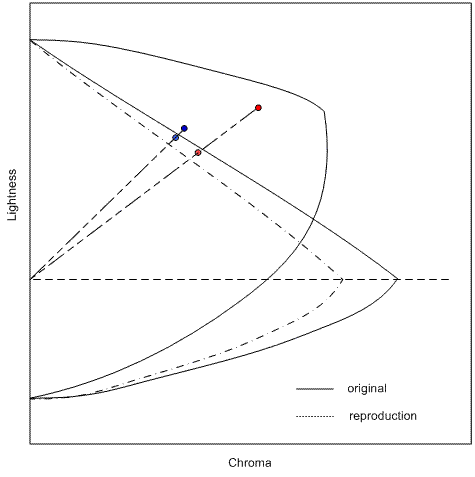
Figura 10 : Inversión de tono causada por SGCK



Figura 11: Imagen original, resultado SGCK y Resultado BasicPhoto
En la figura 11 se muestra esta inversión de tono. A la izquierda se muestra una imagen original capturada por una cámara digital; en el centro, la imagen tal como la reproduce SGCK; y a la derecha, la imagen como se reproduce en BasicPhoto. La imagen de la izquierda está en el espacio de color de la cámara digital, las imágenes central y derecha están en el espacio de color de una pantalla de vídeo LCD. En la imagen original, la parte superior de la tetera es más oscura que la parte inferior, porque la parte inferior refleja el mantel que está sentado sobre. En la imagen SGCK, la parte superior es realmente más ligera que la parte inferior, debido a la inversión de tono. Además, es difícil ver los elementos reflejados en la parte inferior de la tetera. A la derecha, BasicPhoto ha corregido la inversión de tono y los artículos reflejados son más claramente distintivos.
El segundo cambio se realizó para mejorar la reproducción de colores casi negros en impresoras donde el negro más negro no cae directamente en el eje neutro CIECAM02. En la figura 12 siguiente se muestra una imagen convertida en sRGB; reproducido para una impresora RGB de inyección de lápiz mediante SGCK; y se reproducen para la misma impresora con BasicPhoto. La imagen en el centro no usa el dispositivo completo negro, por lo que carece del contraste visto en el original. El contraste se restaura con BasicPhoto.



Figura 12: Negro mejorado
El tercer cambio se realizó para mejorar la reproducción del color para las cámaras digitales. Especialmente en los casos en los que la cámara digital se ha perfilado mediante un destino de referencia, una descripción de límite de gama creada a partir de colores medidos podría no incluir todos los colores que se pueden capturar en una escena real. En lugar de recortar todos los colores a la gama del destino de color medido, se permite la extrapolación para producir un límite de gama creíble. El algoritmo BasicPhoto está diseñado para admitir este límite de gama extrapolada.
El cuarto cambio se realizó porque CIECAM02 funciona bien para la asignación de la gama. El proceso recomendado por TC8-03 de convertir los colores del dispositivo a D65 a 400 cd/m2 y, a continuación, usar el espacio de color ipT RIT es un proceso intensivo y lento.
Asignación de matiz
HueMap es el equivalente de la intención de saturación icc.
Si el límite de la gama de origen o el límite de la gama de destino no contiene principales, este modelo vuelve al modelo MinCD (relativo) descrito en una sección anterior; por ejemplo, los dispositivos para los que no se pueden determinar los principales (perfiles icc con más de cuatro canales) o perfiles icc monocromáticos.
Este algoritmo ajusta primero el tono del valor de color de entrada. A continuación, ajusta simultáneamente la ligereza y el cromático, utilizando una asignación de desenlazamiento. Por último, recorta el valor de color para asegurarse de que está dentro de la gama.
El primer paso es determinar el "Hue Wheels". Busque los valores de JCh para los colores primarios y secundarios del dispositivo de origen y destino. Solo tienes en cuenta los componentes de matiz. Esto da como resultado una rueda de matiz principal o secundaria con seis puntos de color para cada dispositivo. (Vea la figura 13).
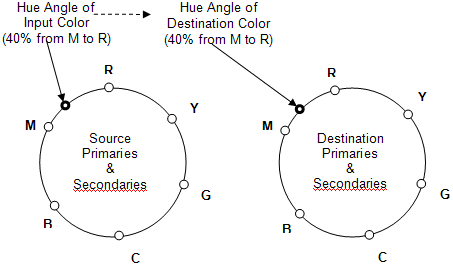
Figura 13 : Ruedas hue
Se pueden obtener mejores resultados si la principal azul de origen no se gira a la principal azul de destino. En su lugar, el ángulo de tono principal principal de origen se usa como ángulo de matiz principal azul de destino.
A continuación, realice las rotaciones de matiz para cada color de entrada de la imagen de origen,
a)Con el ángulo de matiz del color de entrada, determine la ubicación del color en la rueda de matiz de origen en relación con los dos colores primarios o secundarios adyacentes. La ubicación se puede considerar como un porcentaje de la distancia entre las primarias. Por ejemplo, el matiz de color de entrada es el 40 por ciento del camino desde el valor de matiz de Magenta hasta el valor de matiz de Rojo.
b)En la rueda de matiz de destino, busque el ángulo de matiz asociado, por ejemplo, el 40 por ciento de Magenta a Rojo. Este valor será el ángulo de tono de destino.
En general, las fuentes primarias y secundarias no estarán en los mismos ángulos de tono que las primarias y secundarias de destino; es decir, el ángulo de tono de destino normalmente será diferente del ángulo de tono de origen.
Por ejemplo, supongamos que las ruedas de matiz producen los siguientes valores:
Fuente M = 295 grados, Fuente R = 355 grados.
Destino M = 290 grados, Destino R = 346 grados.
Si el ángulo de tono del color de entrada es de 319 grados, es el 40 por ciento del ángulo (24 grados) del origen M al origen R. El ángulo de M a R es de 60 grados y el ángulo de M a matiz de entrada es de 24 grados. Calcule el ángulo en el destino que es el 40 por ciento del destino M al destino R (22 grados), por lo que el ángulo de tono del color de destino es de 312 grados.
A continuación, calcule los puntos de referencia de tono para el tono de origen y el tono de destino. Para calcular el punto de referencia de tono para un valor h (matiz) determinado, quiere encontrar el valor J (ligereza) y el valor C (cromático).
- Busque el valor J del punto de referencia de matiz interpolando entre los valores J para los puntos primarios o secundarios adyacentes, utilizando la posición relativa del matiz; por ejemplo, el 40 por ciento en este ejemplo.
- Busque el valor máximo de C en este valor J y h. Ahora tiene el JCh del punto de referencia de matiz para ese matiz.
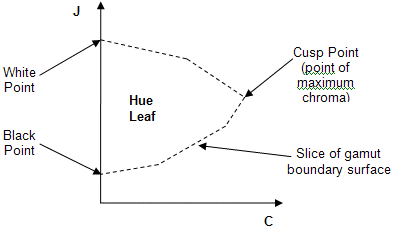
Figura 14: hoja de tono (visualización de un segmento de límite de gama en un tono específico)
El siguiente paso consiste en calcular la asignación de escalonar para cada píxel. En primer lugar, visualice una hoja de matiz desde la gama de origen para el ángulo de matiz de color de origen y una hoja de matiz de la gama de destino para el ángulo de matiz de destino calculado durante la rotación de matiz. Las hojas de matiz se crean tomando un "segmento" de la superficie de límite de gama JCh en un ángulo de matiz específico (vea la figura 14).
NOTA: Por motivos de optimización del rendimiento, las hojas de tono no se crean realmente; se describen y se muestran aquí solo con fines de visualización. Las operaciones se realizan directamente en la superficie de límite de gama en el matiz especificado. A continuación, calcule los puntos de referencia de matiz para determinar la asignación de shear.
- Realice una escala de ligereza para asignar los puntos negros y blancos de la hoja de origen a la hoja de destino (vea la figura 15). Los puntos negros y blancos de la hoja de tono de origen se asignan linealmente a los puntos negros y blancos de la hoja de tono de destino, escalando todas las coordenadas J del límite de origen. El valor de color de entrada asignado al matiz se escala de la misma manera.
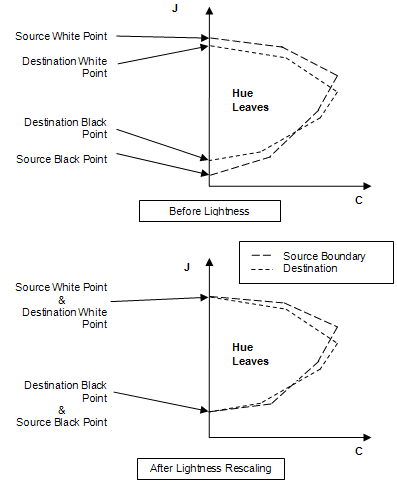
Figura 15: Asignación de luz
- Determine los puntos de referencia de matiz para cada hoja de matiz. Aplique una asignación de escalo a la hoja de origen para que coincidan los puntos de referencia de origen y destino (vea la figura 16). El punto de referencia de una gama en un matiz específico es el punto de referencia de matiz interpolado entre los principales adyacentes. El punto de referencia de la hoja de matiz de origen se asigna linealmente al punto de referencia de la hoja de matiz de destino, utilizando una operación de "escalaje" que bloquea el eje J, manteniendo los puntos negros y los puntos blancos estacionados. Los puntos negros, los puntos blancos y los puntos de referencia de las hojas de tono de origen y destino deben coincidir.
- Aplique la asignación de esquela al valor de color de entrada ajustado por la luz. Las coordenadas J y C del valor de color de origen se escalan proporcionalmente, en relación con su distancia desde el eje J.
- A continuación, se realiza una compresión de ligereza sutil dependiente del cromático hacia el valor J del punto de referencia de matiz en el punto de color asignado a la trama. La compresión hacia la referencia de matiz J se realiza de forma similar a gamma, donde no se ven afectados los puntos blanco, negro, grises y puntos de la referencia de matiz J. Todos los demás puntos tienden hacia la referencia de matiz J de forma suave, ligeramente agrupados cerca de la referencia de tono J, con la constante restante cromática. La dependencia cromática garantiza que los colores neutros no se ven afectados, y el efecto se incrementa en los colores con mayor cromática.
A continuación se muestra una descripción matemática de la compresión de ligereza hacia la referencia de matiz J o ajustando el valor J del punto de destino. Se denomina punto de destino porque se ha asignado una estrabación en la gama de destino.
En primer lugar, calcule "factorC" (factor de dependencia cromática) para el punto de destino, que determina cuánto efecto tendrá la compresión de ligereza. Los puntos cercanos o en el eje J tendrán poca o ninguna compresión; puntos más alejados del eje J (alta cromática) tendrán más compresión aplicada. Multiplique por 0,5 para asegurarse de que factorC es menor que 1, ya que es posible que sourceC pueda ser ligeramente mayor que referenceC, pero no dos veces grande.
factorC = (destinationC/referenceC) ? 0,5
Dónde:
destinationC es el valor C del punto de destino.
referenceC es el valor C del punto de referencia de Hue.
A continuación, determine si el punto de destino J está por encima o por debajo de la referencia de tono J. Si es anterior, haga lo siguiente:
Calcule "factorJ" para el punto de destino en relación con el referenceJ. Este valor factorJ estará comprendido entre 0 y 1 (0 si está en el referenceJ; 1 si está en maxJ).
factorJ = (destinationJ - referenceJ) / (maxJ - referenceJ)
Dónde:
destinationJ es el valor J del punto de destino.
referenceJ es el valor J del punto de referencia de tono.
maxJ es el valor J máximo de la gama.
Aplique una función de potencia de tipo gamma a factorJ, lo que reducirá factorJ por una cantidad determinada. En este ejemplo se usa la potencia de 2 (el cuadrado). Resta el factorJ reducido del factorJ original y multiplique el resultado por el intervalo total de J por encima de la referencia principalJ para encontrar el "deltaJ", que representa el cambio en J después de la compresión de ligereza, pero no incluye la dependencia cromática.
deltaJ = (factorJ - (factorJ ? factorJ)) ? (maxJ - referenceJ)
Aplique factorC al deltaJ (cuanto mayor sea el cromático, mayor será el efecto) y calcule el nuevo valor J para el punto de destino.
destinationJ = destinationJ - (deltaJ ? factorC)
Si el valor J para el punto de destino está por debajo de referenceJ, se realiza un cálculo similar a los pasos anteriores A-C, usando minJ en lugar de maxJ para encontrar el intervalo en J para calcular el factorJ y teniendo en cuenta la polaridad de las operaciones "debajo" de la referenciaJ.
factorJ = (referenceJ - destinationJ) / (referenceJ - minJ)
deltaJ = (factorJ - (factorJ ? factorJ)) ? (referenceJ - minJ)
destinationJ = destinationJ + (deltaJ ? factorC)
Dónde:
minJ es el valor J mínimo de la gama.
El cromático para los puntos de color de entrada se expande linealmente (siempre que sea posible) a lo largo de la ligereza constante proporcional al valor cromático máximo de las gamas de origen y destino en ese tono y ligereza. Combinado con la compresión de ligereza dependiente del cromático anterior, esto ayuda a conservar la saturación porque la asignación de escisiones mediante los puntos de referencia a veces hace que el punto de origen sobrecomprima en el cromático (véase la figura 16).
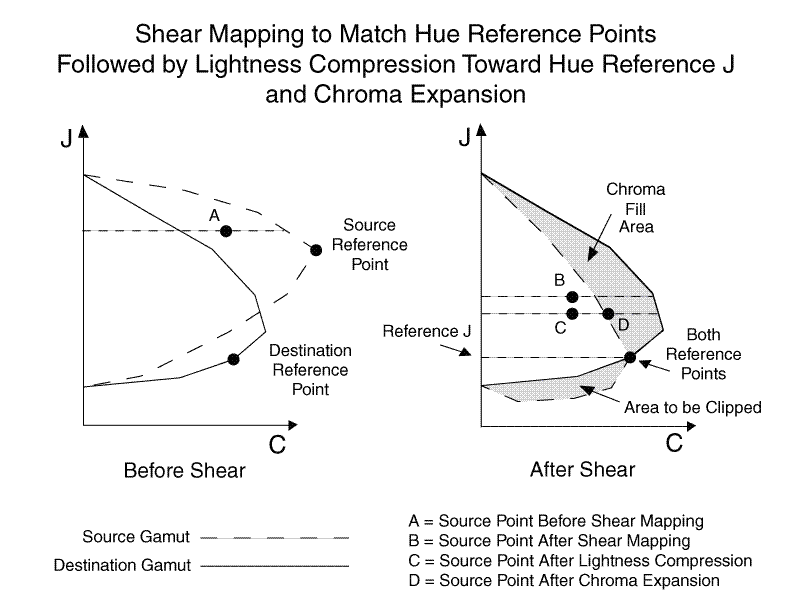
Figura 16: Asignación de shear, compresión de ligereza hacia la referencia de tono J y expansión cromática
A continuación se muestra una descripción matemática del proceso de expansión cromática o ajustar el valor C del punto de destino. Se denomina punto de destino porque se ha asignado el desasignado y la ligereza comprimidos en la gama de destino.
Antes de la asignación de escote, determine sourceExtentC (la extensión cromática en la ligereza y el tono del punto de origen).
Después de la asignación y la compresión de ligereza que transforma el punto de origen en el punto de destino, determine el destExtentC (la extensión cromática en la luz y el tono del punto de destino).
Si sourceExtentC es mayor que el destExtentC, no es necesario ajustar el cromático al punto de destino y puede omitir el paso siguiente.
Ajuste destinationC (el cromático del punto de destino) para ajustarse a la extensión cromática de destino en esta ligereza y tono.
destinationC = destinationC ? (destExtentC /sourceExtentC)
Dónde:
destinationC es el valor C del punto de destino.
sourceExtentC es el valor C máximo de la gama de origen en la ligereza y el matiz del punto de origen.
destExtentC es el valor C máximo de la gama de destino en la ligereza y el tono del punto de destino.
Por último, realice el recorte de distancia de mimimum. Si el color de entrada girado por matiz, ajustado por la luz y el color de entrada asignado por corte sigue ligeramente fuera de la gama de destino, guárdelo (muévalo) al punto más cercano del límite de la gama de destino (vea la figura 17).
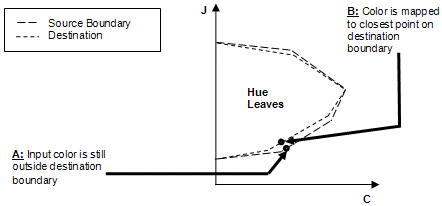
Figura 17: Recorte de distancia mínimo
Descripción de límites de gamut y algoritmos de shell de gamut
La función de límite de gama de dispositivos usa el motor del modelo de dispositivo y los parámetros analíticos para derivar un límite de gama de dispositivos de color, que se describe como una lista de vértices indizado del casco de la gama de dispositivos. El casco se calcula de forma diferente en función de si está trabajando con dispositivos aditivos, como monitores y proyectores, o dispositivos restivos. La lista de vértices indizada se almacena en CIEJab. La estructura de la lista de vértices indexados está optimizada para la aceleración de hardware mediante DirectX.
Este enfoque tiene muchas soluciones conocidas. Si busca "Casco convexa DirectX" en la Web, obtendrá más de 100 visitas. Por ejemplo, hay una referencia de 1983 en este tema específico (Teoría y aplicación de gráficos informáticos, "Shiphulls, superficies b-spline y cadcam", pp. 34-49) con referencias que datan de 1970 a 1982 en el tema.
La colección de puntos se puede determinar a partir de información disponible externamente, como se indica a continuación:
- Los puntos del shell de referencia para monitores se generan mediante un muestreo del cubo de color en el espacio de color del dispositivo.
- Los puntos del shell de referencia para impresoras y dispositivos de captura se obtienen de los datos de ejemplo usados para inicializar el modelo.
- Los puntos del shell de referencia para scRGB y sRGB se generan mediante un muestreo del cubo de color para sRGB.
- Los puntos del shell creíble para los dispositivos de captura se generan mediante un muestreo del cubo de color en el espacio de color del dispositivo.
- Los puntos para el shell de referencia para proyectores se generan mediante un muestreo de un poliedro en el cubo de color en el espacio de color del dispositivo.
- Los puntos del posible shell para los espacios de color de rango dinámico ancho se generan mediante un muestreo del cubo de color en el propio espacio.
Puede crear una lista de vértices que describa eficazmente la gama de dispositivos de color, dado un perfil de dispositivo y servicios de soporte técnico del sistema.
En el caso de los dispositivos de salida, el límite de la gama describe el intervalo de colores que el dispositivo puede mostrar. Se genera un límite de gama a partir de los mismos datos que se usan para modelar el comportamiento del dispositivo. Conceptualmente, se genera un muestreo del rango de colores que el dispositivo puede producir, medir los colores, convertir las medidas en espacio de apariencia y, a continuación, usar los resultados para crear el límite de gama.
Los dispositivos de entrada son más complicados. Cada píxel de una imagen de entrada debe tener algún valor. Cada píxel debe ser capaz de representar cualquier color encontrado en el mundo real de alguna manera. En este sentido, no hay colores "fuera de la gama" para un dispositivo de entrada, ya que siempre se pueden representar.
Todos los formatos de imagen digital tienen un intervalo dinámico fijo. Debido a esta limitación, siempre hay algunos estímulos distintos que se asignan al mismo valor digital. Por lo tanto, no se puede establecer una asignación uno a uno entre los colores del mundo real y los valores de la cámara digital. En su lugar, el límite de la gama se forma mediante la estimación de una gama de colores reales que pueden producir las respuestas digitales de la cámara. Usa ese intervalo estimado como la gama para el dispositivo de entrada.
Las principales se incluyen para proporcionar la asignación de la gama de tipos de intención de gráficos empresariales.
En el estilo orientado a objetos true, abstrae la representación subyacente del límite de la gama. Esto le permite cambiar la representación en el futuro. Para comprender el descriptor de límites de gama (GBD) usado en el nuevo CTE, primero debe comprender cómo funcionan los algoritmos de asignación de gama (GMG). Tradicionalmente, los GMA se han diseñado para satisfacer las necesidades de la comunidad de arte gráfico; es decir, para reproducir imágenes que ya se han representado correctamente para el dispositivo en el que se creó la imagen de entrada. El objetivo de los GMA de artes gráficas es hacer la mejor reproducción posible de la imagen de entrada en el dispositivo de salida. El nuevo GBD de CTE está diseñado para resolver cuatro problemas clave.
Dado que la imagen de entrada se representa para el dispositivo de entrada, todos los colores caben dentro del intervalo entre el punto blanco y el punto negro del medio. Supongamos que la imagen es una fotografía de una escena en la que hay un blanco difuso, como una persona en una camiseta blanca, y un resaltado especular, como la luz que refleja una ventana o un parachoques cromado. La escena se representará en el medio de entrada para que el resaltado especular se asigne al punto blanco del medio y el blanco difuso se asigna a un color neutro más oscuro que el punto blanco del medio. La elección de cómo asignar colores de la escena al medio de entrada es una decisión dependiente de la escena y una decisión estética. Si faltaba el resaltado especular de la escena original, el blanco difuso probablemente se asignaría al punto blanco del medio. En una escena con muchos detalles destacados, se dejaría más rango entre el blanco especular y el blanco difuso. En una escena en la que el resaltado no es significativo, es posible que quede un intervalo muy pequeño.
En el caso de las imágenes representadas previamente, la asignación de la gama es relativamente sencilla. Básicamente, el punto blanco del medio original se asigna al punto blanco del medio de reproducción, el punto negro de origen se asigna al punto negro de destino y la mayor parte de la asignación está completa. Los diferentes OMG existentes proporcionan variaciones para asignar otros puntos en la escala de tono del medio de origen y diferentes formas de controlar los valores cromáticos fuera de la gama. Pero la asignación de blanco a blanco y negro a negro es coherente en todas estas variaciones. Esta implementación requiere que el blanco esté por encima de un J* de 50 y negro por debajo de un J* de 50.
No todas las codificaciones de color limitan los intervalos de colores para las imágenes de entrada. La codificación de color estándar IEC scRGB (IEC 61966-2-2) proporciona 16 bits para cada uno de los tres canales de color rojo, verde y azul (RGB). En esa codificación, el negro de referencia no está codificado como el triple RGB (0, 0, 0), pero como (4096, 4096, 4096, 4096). El blanco de referencia se codifica como (12288, 12288, 12288). La codificación scRGB se puede usar para representar resaltados especulares y detalles de sombra. Incluye triples RGB que no son físicamente posibles porque requieren cantidades negativas de luz y codificaciones que están fuera del locus espectral CIE. Claramente, ningún dispositivo puede producir todos los colores en la gama scRGB. De hecho, ningún dispositivo puede producir todos los colores que un ser humano puede ver. Por lo tanto, los dispositivos no pueden rellenar la gama scRGB y sería útil poder representar la parte de la gama que realizan. Cada dispositivo tiene un intervalo de valores en el espacio scRGB que puede producir. Estos son los colores "esperados" para el dispositivo; sería sorprendente que el dispositivo produzca colores fuera de esta gama. Hay una transformación definida del espacio scRGB al espacio de apariencia, por lo que cada dispositivo también tiene un intervalo de valores de apariencia que se espera que reproduzca.
Tanto en scRGB como en la entrada de los dispositivos de captura caracterizados por un destino fijo, es posible obtener un valor fuera del intervalo de valores esperados. Si alguien calibra una cámara a un destino de prueba; y, a continuación, captura una escena con resaltados especulares, podría haber píxeles más brillantes que el punto blanco del destino. Lo mismo puede ocurrir si un rojo natural es más cromático que el rojo objetivo. Si alguien toma una imagen scRGB de un dispositivo y, a continuación, edita manualmente los colores de la imagen, es posible crear píxeles que se encuentren fuera del intervalo esperado de la gama de dispositivos, aunque estén dentro de la gama completa scRGB.
Es posible que un segundo problema no, al principio, parezca estar relacionado con esto. Surge cuando se usa un destino de color para caracterizar un dispositivo de entrada, como una cámara o un escáner. Los objetivos reflectantes se suelen producir en papel y contienen una serie de revisiones de color. Los manufaturers proporcionan archivos de datos con medidas de color tomadas bajo una condición de visualización fija para cada revisión de color. Las herramientas de generación de perfiles de color crean una asignación entre estos valores medidos y los valores devueltos por los sensores de color de los dispositivos. El problema es que a menudo estos destinos de color no cubren la gama completa de valores de dispositivo. Por ejemplo, el escáner o la cámara pueden devolver un valor de (253, 253, 253, 253) para el punto blanco de referencia y una revisión roja de referencia podría tener un valor RGB de (254, 12, 4). Estos representan el intervalo de valores esperados para el dispositivo de entrada, en función de los valores de destino. Si caracteriza el dispositivo de entrada en función de las respuestas al destino, solo espera colores dentro de este intervalo estrecho. Este rango no solo es menor que el rango de colores que los humanos pueden ver, es menor que el rango de colores que el dispositivo puede producir.
En ambos casos, es difícil calcular la gama del dispositivo o la imagen de entrada, a pesar de la existencia de una gama o medidas de referencia. En el primer problema, la gama creíble del dispositivo de entrada es menor que la gama completa de scRGB. En el segundo problema, la gama de referencias del destino es menor que la posible gama completa del dispositivo de entrada.
El tercer problema implica la asignación de tono. Se han propuesto muchos modelos de límites de gama que pueden representar adecuadamente imágenes predepresentadas utilizadas en las artes gráficas, por ejemplo, el rango de montaña Braun y Fairchild GBD (Braun[97]) y el descriptor de límite Segment Maxima de Morovic (Morovic[98]). Pero estos modelos solo proporcionan información sobre los extremos de la gama del dispositivo; faltan información sobre otros puntos de la asignación tonal. Sin esta información, los GMA solo pueden realizar estimaciones aproximadas de la asignación de tono óptima. Peor es que estos modelos no proporcionan ayuda para el intervalo dinámico extendido en scRGB y en imágenes de cámara digital.
¿Cómo se resuelve este problema en las industrias fotográficas y videográficas? La cámara captura una imagen. Los expertos pueden debatir la cantidad de representación que se produce en el dispositivo de captura; pero están de acuerdo en que no es una cantidad significativa. Ambas tecnologías no asignan un blanco difuso en una escena capturada al punto blanco del medio. Del mismo modo, no asignan el punto negro de la escena al punto negro del medio. El comportamiento de la película fotográfica se describe en el espacio de densidad utilizando una curva característica, a menudo denominada Hurter y Driffield, o la curva H&D. La curva muestra la densidad de la escena original y la densidad resultante en la película. En la figura 18 se muestra una curva H&D típica. El eje x representa el aumento de la exposición del registro. El eje Y representa la densidad de la diapositiva. Cinco puntos de referencia están marcados en la curva: negro sin detalle, que representa la densidad mínima en el negativo; negro con detalle; referencia tarjeta gris media; blanco con detalle; y blanco sin detalle. Tenga en cuenta que hay espacio entre negro sin detalles (que representa el dispositivo negro) y negro con detalle (negro de sombra). Del mismo modo, hay espacio entre blanco con detalle (blanco difuso) y blanco sin detalle (que representa el blanco del dispositivo).
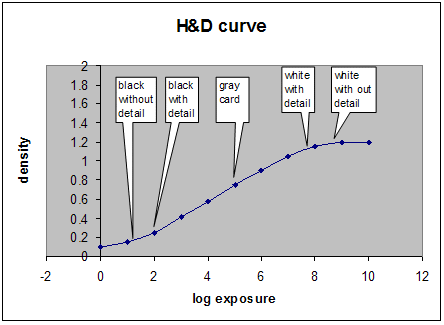
Figura 18: curva H&D para película diapositiva
El sector del vídeo proporciona "headroom" y "footroom" en imágenes. En la especificación 709 de la UIT, la luminancia (denominada Y) se codifica en 8 bits, con un intervalo de 0 a 255. Sin embargo, el negro de referencia se codifica en 15 y el blanco de referencia se codifica como 235. Esto deja el intervalo de codificación entre 236 y 255 para representar resaltados especulares.
El sector de vídeo presenta un sistema de bucles cerrados esencialmente. Aunque hay muchos proveedores de equipos diferentes, los sistemas de vídeo se basan en dispositivos de referencia. Hay una codificación estándar para imágenes de vídeo. No es necesario comunicar un límite de gama con imágenes de vídeo, ya que todas las imágenes se codifican para su reproducción en el mismo dispositivo de referencia. La película también está cerrada porque no es necesario transmitir datos intermedios entre distintos componentes. Quiere una solución que permita que las imágenes de los dispositivos con distintas gamas y que representen escenas predepresentadas y no representadas se reproduzcan en la salida con distintas gamas.
Un cuarto problema que el nuevo CTE debe resolver es que los colores visualmente grises producidos por un dispositivo, por ejemplo, cuando rojo=verde=azul en un monitor, con frecuencia no se encuentran en el eje neutro del CAM (cuando el cromático = 0,0). Esto provoca grandes dificultades para los GMA. Para que los GMA funcionen bien, tienes que ajustar la descripción de la gama del dispositivo y de los puntos de entrada para que el eje neutro del dispositivo caiga en el eje neutro del espacio de apariencia. Tiene que ajustar puntos fuera del eje neutro por una cantidad similar. De lo contrario, no puede realizar gradaciones suaves a través de la imagen. Al salir del GMA, se deshace esta asignación, en relación con el eje neutro del dispositivo de salida. Esto se conoce como un enderezamiento "quiropráctico" del eje. Al igual que un quiropráctico, no solo enderezas el esqueleto (eje neutro), sino que ajustas el resto del cuerpo para moverse junto con el esqueleto. Como un quiropráctico, no ajustas el esqueleto por la misma cantidad a través de todo el espacio. En su lugar, ajustará diferentes secciones de forma diferente.
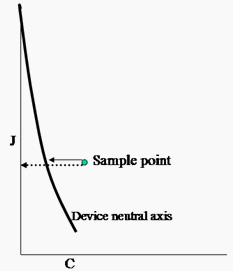
Figura 19: Curvatura del eje neutro del dispositivo en relación con el eje neutro CIECAM
Lo que requiere el nuevo CTE es un modelo de un límite de gama que se puede usar para representar imágenes de origen representadas y no representadas, proporcionar información sobre la apariencia de los neutros del dispositivo y proporcionar información sobre las imágenes de asignación de tono con un amplio rango de luminancia.
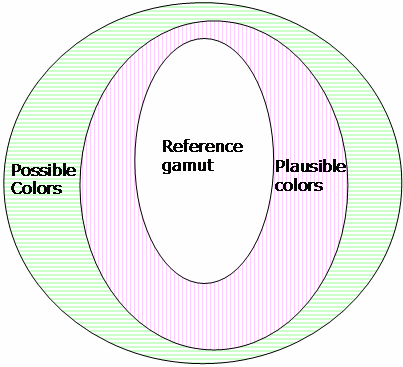
Figura 20: Tres shells de gama
El límite de la gama se compone de tres shells que definen tres regiones.
En el nuevo CTE, el shell exterior de la gama se forma con un casco convexa hecho a partir de puntos de muestra en la gama de dispositivos. Un casco se forma tomando un conjunto de puntos de muestra y rodearlos por una superficie. Un casco convexa tiene la propiedad adicional de ser convexa en todas partes. Por lo tanto, este no es el casco más pequeño posible que se puede ajustar a los datos. Sin embargo, la experimentación ha demostrado que el ajuste de los puntos de ejemplo es demasiado estricto y provoca artefactos poco atractivos en imágenes, como una falta de sombreado suave. El casco convexa parece resolver estos problemas.
En el algoritmo, los valores de apariencia de color se obtienen para un conjunto de puntos muestreados desde el dispositivo. Para monitores e impresoras, los valores de apariencia de color se obtienen mediante la salida de muestras y, a continuación, medirlos. También puede crear un modelo de dispositivo y, a continuación, ejecutar datos sintéticos a través del modelo de dispositivo para predecir valores medidos. A continuación, los valores medidos se convierten del espacio colorimétrico (XYZ) al espacio de apariencia (Jab) y el casco se encapsula alrededor de los puntos.
El punto clave de este algoritmo es que el punto blanco adoptado usado en la conversión de colorimétrica al espacio de apariencia no tiene que ser el punto blanco del medio. En su lugar, puede seleccionar un punto más lejos dentro de la gama y en (o cerca) del eje neutro. Ese punto tendrá entonces un valor J de 100. Las muestras con un valor Y medido mayor que el punto blanco adoptado terminarán con un valor J mayor que 100.
Si coloca el punto blanco difuso de la escena como punto blanco adoptado para la conversión del espacio de color, los resaltados especulares de la escena se detectarán fácilmente como tener un valor J mayor que 100.
Dado que el modelo de color CIECAM02 se basa en el sistema visual humano, después de seleccionar un blanco adoptado, el nivel de luminancia del punto negro (J = 0) se determina automáticamente por el modelo. Si la imagen de entrada tiene un amplio intervalo dinámico, es posible que haya valores que se asignen a valores J inferiores a cero.
En la figura 21 siguiente se muestran los neutrales del dispositivo que se ejecutan a través del centro de las gamas de referencia y de referencia.
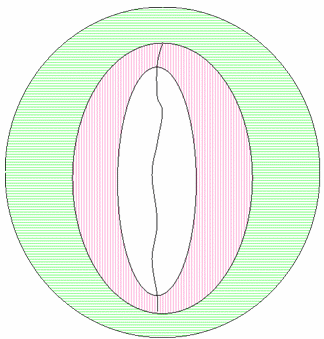
figura 21: eje neutro del dispositivo agregado al límite de gama
Todas las asignaciones de gama implican recortar un intervalo de entrada a una gama de salida o comprimir la gama de entrada que cabe dentro de la gama de salida. Los algoritmos más complejos se forman comprimiendo y recortando en diferentes direcciones, o dividiendo la gama en regiones diferentes y realizando recortes o compresión en las distintas regiones.
El nuevo CTE amplía este concepto para admitir las regiones de una posible gama, una gama creíble y una gama de referencias, y permite a los GMA asignarlos de maneras diferentes. Además, los GMA tienen información sobre el eje neutro del dispositivo. En la siguiente explicación se aborda cómo controlar situaciones en las que las gamas y las gamas de referencias se han contraído entre sí.
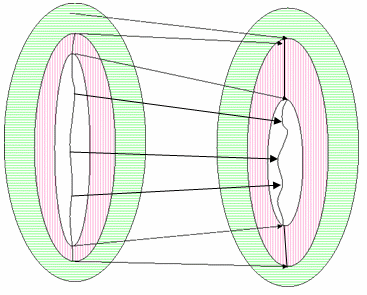
Figura 22: GMA con dos descriptores de gama no contraídos
Es posible que vea este ejemplo si asigna desde un dispositivo de entrada, como una cámara o un escáner que se caracteriza por un destino reflectante, al espacio scRGB. Aquí los colores creíbles que son más claros que el blanco de referencia son resaltados especulares. En la práctica, la caracterización de una cámara con un destino podría no generar el rango completo de valores posibles en la cámara; sin embargo, los resaltados especulares y los colores muy cromáticos encontrados en la naturaleza lo harían. (Los destinos transmisivos suelen tener una revisión que sea la densidad mínima posible en el medio. Con este objetivo, los resaltados especulares caerían dentro del intervalo del destino). El negro de referencia para un destino reflectante sería el principio de la región negra de sombra. Es decir, es probable que haya colores en las sombras que son más oscuros que el negro en el destino. Si la imagen contiene mucho contenido interesante en esa región, puede ser útil conservar esa variación tonal.
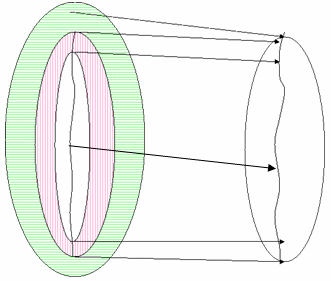
Figura 23: GMA con la gama de destino contraída
En la figura 23 se muestra un posible algoritmo de asignación de gama cuando la gama de destino solo proporciona el intervalo entre el blanco y el negro del dispositivo y no hay colores posibles fuera de esta gama. Esto es probable que suceda para dispositivos de salida típicos, como impresoras. Los colores posibles se asignan al borde de la gama de destino. Pero carece de una curva de tono para el dispositivo de salida. El GMA debe seleccionar algún punto neutro de la luminancia inferior para usarlo como destino de asignación para el blanco de referencia. Un algoritmo sofisticado puede hacerlo mediante histogramas que histogramas en la imagen de origen y ver cuántas caídas se encuentran en el rango de lo esperado pero más claro que el blanco de referencia. Cuantos más ligeros, más espacio se requiere en el dispositivo de destino entre los puntos asignados para los resaltados especulares y el blanco de referencia. Un algoritmo más sencillo podría seleccionar una distancia arbitraria a la escala de ligereza del blanco del dispositivo, como el 5 %. Un enfoque similar se aplica a la asignación del negro máximo y negro de sombra.
Después de generar la curva de tono de destino, puede asignar en un método similar al usado en la figura 23 anterior. Todos los puntos de la curva de tono de destino se encontrarán dentro de la gama del dispositivo y todos los puntos de la asignación deben estar dentro de la gama de dispositivos.
Si invierte las figuras izquierda y las figuras derechas, y las direcciones de las flechas de la figura 23, puede describir el caso en el que la imagen de origen solo tiene una gama de referencia y las tres gamas del dispositivo de salida no se han contraído entre sí. Un ejemplo de esto podría ser la asignación de un monitor a scRGB. De nuevo, el GMA debe sintetizar los puntos de control de los cinco puntos de la curva de tono de la imagen de origen. Algunas asignaciones podrían colocar todos los puntos de la curva de tono dentro de la gama de dispositivos scRGB, mientras que otras asignaciones podrían usar más de la gama scRGB asignando blanco difuso al blanco de referencia y permitiendo que el blanco especular se asigne a un valor más claro.
Por último, tiene el caso en el que ambos dispositivos solo tienen la gama de referencia, que es la forma en que funcionan la mayoría de los algoritmos de asignación de gama. Para que pueda resolver esto simplemente revierte a los algoritmos actuales. Como alternativa, si tiene una manera razonable de determinar los cinco puntos de referencia para los dispositivos de origen y destino, puede organizar la asignación de los puntos de referencia.
Las gamas de dispositivos contienen más de los cinco puntos de referencia en el eje neutro. Estos solo representan los límites entre las posibles regiones de la imagen. Entre cada uno de los puntos de referencia, puede usar cualquiera de las técnicas de asignación de gama existentes. Por lo tanto, puede recortar el rango de colores inesperados y comprimir todos los colores entre el blanco y el negro esperados, o puede recortar todos los colores fuera del rango de referencia y comprimir dentro de ese intervalo. Hay muchas posibilidades, que se pueden implementar en diferentes OMG. Además, los GMA pueden comprimir y recortar de diferentes maneras. Todas esas combinaciones se tratan en esta invención.
Hasta ahora en esta discusión, la gama se ha tratado como si fuera únicamente una función del dispositivo en el que se creó, capturó o mostró la imagen. Sin embargo, no hay ninguna razón por la que todas las imágenes de un dispositivo deben tener la misma gama. Los GMA dependen de los datos de GBD. Si el descriptor se cambia entre imágenes, no hay forma de que los OMG conozcan. En concreto, si las imágenes no tienen resaltados especulares, los GMA funcionan mejor si el descriptor de gama no muestra que hay colores más claros que el blanco difuso.
En la nueva arquitectura de CTE, es posible usar más de una GMA. El uso de varios GGA es intrínsecamente mal definido. Por ejemplo, si un dispositivo de captura asocia una GMA con su "apariencia y apariencia", tiende a hacerlo con una gama de destino "dirigida". Lo mismo sucede con los dispositivos de salida y las gamas de origen "dirigidas". La gama sRGB es una gama implícita de destino común. Por lo tanto, se recomienda encarecidamente usar una sola GMA, si la previsibilidad es una prioridad. Un único flujo de trabajo de GMA debe ser el valor predeterminado para todos los flujos de trabajo, especialmente los flujos de trabajo de consumidor y prosumer. Aunque la asignación de la gama para la reproducción preferida debe realizarse una vez, hay instancias en las que se incluyen varios procesos de asignación. En primer lugar, para la corrección, se realiza una asignación preferida a la gama del dispositivo de destino final y, a continuación, una representación colorimétrica en la gama del dispositivo de corrección. En segundo lugar, algunos tipos de asignación se usan para modificar las características de la imagen, pero no se incluyen para asignar a una gama de dispositivos, por ejemplo, ajustar la curva de tono o la cromática. Si se usan varios GMA, la interfaz de transformación toma una matriz de mapas de gama enlazados, es decir, mapas de gama que se han inicializado con un par de descripciones de límites de gama. Cuando hay más de un mapa de gama, el límite de la gama de entrada para un mapa de gama de gamut correcto debe ser el mismo que el límite de gama de salida de su predecesor.
La función de límite de gama de dispositivos toma el motor del modelo de dispositivo y los parámetros analíticos y deriva un límite de gama de dispositivos de color descrito como una lista ordenada de vértices del casco convexa de la gama de dispositivos. La lista de vértices ordenada se almacena en CIEJab. La estructura de la lista de vértices ordenada está optimizada para la aceleración de hardware mediante DirectX. Este enfoque tiene muchas soluciones conocidas (busque "DirectX convexa" en la web y obtenga más de 100 visitas). También hay una referencia de 1983 en este tema (Teoría y aplicación de gráficos informáticos, "Shiphulls, superficies b-spline y cadcam" pp. 34-49), con referencias que datan de 1970 a 1982 sobre el tema.
Se pueden usar dos técnicas diferentes para calcular los triángulos en el shell de gama. Para otros dispositivos que no sean dispositivos RGB aditivos, se calcula un casco convexa. Puede considerar la posibilidad de investigar la compatibilidad con casco no convexa para otros dispositivos si tiene acceso directo a estos dispositivos para validar la solidez, el rendimiento y la fidelidad de los algoritmos. Se trata de un proceso conocido que no requiere una descripción adicional. La técnica que se usa para dispositivos RGB aditivos se describe de la manera siguiente.
Diferentes GBD tienen ventajas y desventajas. La representación del casco convexa garantiza propiedades geométricas agradables, como segmentos de tono convex que proporcionan un punto de intersección único con un rayo que emana de un punto en el eje neutro. La desventaja de la representación del casco convexa también es convexidad. Se sabe que muchos dispositivos, específicamente los dispositivos para mostrar, tienen gamas que están lejos de ser convexas. Si la gama real se desvía significativamente de la suposición de convexidad, la representación del casco convexa sería inexacta, posiblemente en la medida en que no represente la realidad.
Después de adoptar un GBD que proporciona una representación razonablemente precisa de la gama real, surgen otros problemas, algunos debido al concepto de segmento de tono. Hay al menos dos situaciones patológicas. En la figura 24 siguiente, una gama de CRT da lugar a segmentos de tono con "islas". En la figura 25, una gama de impresoras da lugar a un segmento de matiz con parte del eje neutro que falta. Los segmentos de matiz patológico no son causados por límites de gama patológica especialmente patológicos en estos casos. Son causados por el concepto muy de segmento de tono, porque (a) se toma a lo largo del matiz constante, y (b) solo toma la mitad del plano que corresponde al ángulo de matiz.
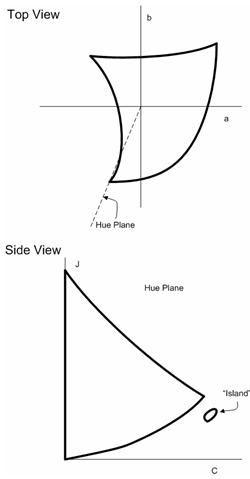
figura 24: un monitor CRT típico tiene una gama que muestra un "curving in" peculiar en los tonos azules. Si se toman segmentos de matiz dentro de este intervalo de matiz, las islas aisladas pueden aparecer en los segmentos de matiz.
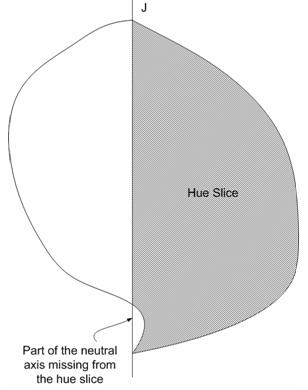
Figura 25: una impresora puede tener una gama que tenga "hueco" en su eje neutro. Cuando se toma un segmento de matiz (que es solo una mitad del plano), hay una "dent" en la parte del límite que es el eje neutro. Esto puede ser difícil de resolver de forma algorítmica.
Para resolver estas patologías, se propone un nuevo marco que abandona el concepto de segmento de tono que se utiliza como punto de partida. En su lugar, el marco usa el conjunto de "elementos de línea de límite" o líneas que se encuentran en el límite de la gama. No proporcionan necesariamente una visualización geométrica coherente como segmentos de matiz, pero admiten todas las operaciones comunes de gama. Además de resolver los problemas mencionados anteriormente, este enfoque también sugiere que la construcción de segmentos de matiz, incluso cuando es posible, es un desperdicio computacional.
Triangulación del límite de gamut
El punto de partida es un GBD que consta de una triangulación del límite de la gama. Los métodos conocidos de construcción de GBD suelen proporcionar esa triangulación. Para la hormigón, aquí se describe un método de construcción de GBD para dispositivos aditivos que se describe aquí. Estos dispositivos incluyen monitores (basados en CRT y basados en LCD) y proyectores. La geometría simple del cubo permite introducir una red regular en el cubo. Las caras de límite del cubo se pueden triangular de varias maneras, como la que se muestra en la figura 26. La arquitectura proporciona un modelo de dispositivo para el dispositivo para que los valores de colorimétricos de los puntos de red se puedan obtener de forma algorítmica o se hayan realizado mediciones directamente para esos puntos. La arquitectura también proporciona CIECAM02, por lo que puede suponer que los datos iniciales ya se han asignado a CIECAM02 espacio de Jab. A continuación, cada punto de red en las caras de límite del cubo RGB tiene un punto correspondiente en el espacio jab. Las conexiones de puntos que forman el conjunto de triángulos en el espacio RGB también inducen un conjunto de triángulos en el espacio jab. Este conjunto de triángulos forma una triangulación razonable del límite de la gama si (a) la red en el cubo RGB es lo suficientemente fina y (b) la transformación del espacio del dispositivo al espacio de color uniforme se comporta correctamente; es decir, asigna límites a límites y no convierte la gama dentro de fuera para que los puntos interiores se conviertan en puntos de límite.
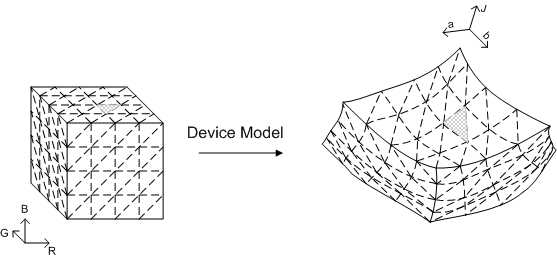
Figura 26: un método sencillo para triangular el límite de la gama de un dispositivo con RGB como su espacio de dispositivo
Elementos de línea de límite
Central en este marco es el concepto de elementos de línea de límite; un conjunto de segmentos de línea que (a) se encuentran en el límite de la gama y (b) se encuentran en un plano. En este caso, el plano es un plano de tono. Cada segmento de línea es el resultado de intersecr el plano con un triángulo de límite de gama. Aunque muchos investigadores han usado la construcción de intersección de un plano con triángulos de límite, generalmente analizan la relación entre estos segmentos de línea e intentan construir un objeto geométrico coherente fuera de los segmentos de línea. Se han diseñado diferentes algoritmos para seguir estos segmentos de línea uno después del otro hasta que se obtiene un segmento de matiz completo, y se han realizado muchos intentos para acelerar el proceso de búsqueda.
Este enfoque es diferente. Interseca el plano con los triángulos para obtener los segmentos de línea. A continuación, considere estos segmentos de línea como el objetos conceptuales básicos. Es necesario analizar la relación entre los segmentos de línea; no tienes que saber cómo están interconectados entre sí. Este punto de vista resuelve el problema de la segmentación de matiz con islas. Los enfoques conocidos que intentan construir segmentos de tono asumen que, si uno comienza con un segmento de línea y lo sigue al siguiente segmento de línea, etc. finalmente conduce al punto inicial, en el que se construiría un segmento de matiz completo. Desafortunadamente, este enfoque perdería la isla (y en el peor escenario, el continente). No insistendo en obtener una imagen geométrica coherente; es decir, segmento de matiz, puede manejar el problema de la isla sin esfuerzo. Otra diferencia importante en este enfoque es que, para acelerar la construcción de segmentos de línea, usa un "filtro de triángulo". El filtro de triángulo produce ciertos triángulos que definitivamente no producirán segmentos de línea que serían útiles en la operación actual de la gama. Dado que la intersección de un triángulo con el plano es costosamente computacional, esto mejora la velocidad. Un efecto secundario es que, no se puede construir un segmento de tono porque faltarían algunos segmentos de línea debido al filtrado de triángulos.
Operación de conversión: CheckGamut
En el ejemplo siguiente se explica cómo funciona el marco y cómo se lleva a cabo CheckGamut, es decir, la operación de comprobar si un color está en la gama.
El marco general se muestra en la figura 27 siguiente. Hay varios componentes. Los componentes etiquetados en cursiva son componentes que pueden ser diferentes en la implementación en función de la operación de gama en cuestión. Los demás componentes son invariables en todas las operaciones de gama. Para comenzar, elentrada dees un conjunto de atributos de color. En el caso de CheckGamut, es el color de la consulta. En la figura 27 y en la siguiente explicación, se supone que el ángulo de tono está entre los atributos de color de entrada o se puede obtener de ellos. Esto es claramente el caso si la entrada es el punto de color completo, ya sea en Jab o JCh, desde el que puede calcular el ángulo de tono. Tenga en cuenta que el ángulo de tono solo es necesario porque se usan planos de matiz. En función de la operación de mutación en cuestión, es posible que no sea necesario usar el plano de matiz. Por ejemplo, en la construcción de la rutina CheckGamut, es posible que quiera usar planos de constante J. Esta es una generalidad que no se usará ni analizará más; pero puede ser útil recordar esta flexibilidad de la metodología para admitir otras operaciones de gama cuando el plano de matiz podría no ser la mejor opción.
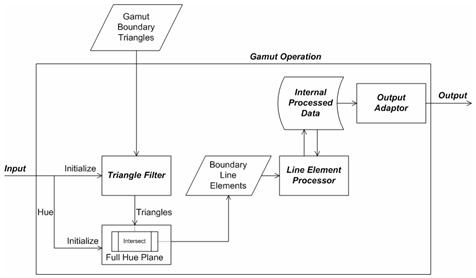
figura 27 : marco para admitir operaciones de gama
El ángulo de matiz, que se obtiene directamente de las entradas o se calcula a partir de las entradas, se usa para inicializar el plano de matiz etiquetado plano de hue completo en la ilustración. Se resalta "Full" porque es el plano completo, no solo el plano medio que contiene el tono. El plano completo contiene el ángulo de matiz de entrada y el ángulo 180 grados opuestos a él. La funcionalidad clave del plano de matiz es la función Intersect, que se explica en la subsección siguiente, Plano de Hue completo: Intersect. Supongamos que el GBD ya se ha construido y que el conjunto de triángulos de límite de gama está disponible. Intersecte los triángulos que han sobrevivido al filtro de triángulos con el plano de tono mediante Intersect. El componente filtro de triángulos de está etiquetado en cursiva, lo que significa que el componente varía en la implementación de diferentes operaciones de gama. La filtro de triángulos de para CheckGamut se explica en la sección Operación gamut: CheckGamut (continuación). El resultado de intersecr un triángulo con el plano de matiz está vacío o un elemento de línea de límite , es decir, un par de puntos distintos. Si el resultado no está vacío, se pasa al procesador de elementos de línea , que de nuevo realiza diferentes cosas en función de la operación de mutación. El procesador de elementos de línea actualiza la estructura de datos interna, datos procesados internos , cuyo contenido o diseño también depende de la operación de mutación. Por lo general, el datos procesados internos contiene la "respuesta" al problema, que se actualiza continuamente con cada nuevo elemento de línea de límite encontrado. Cuando se han procesado todos los elementos de línea de límite, se ha encontrado la respuesta. Permanece para acceder a él a través del adaptador de salida de . Dado que el datos procesados internos es específico de la operación de conversión, el adaptador de salida de también es específico de la operación de mutación.
Plano de Hue completo: Intersección
La función Intersect calcula la intersección del plano de tono y un triángulo. Tan simple como suena, esta función es importante por dos razones.
En primer lugar, la intersección de cada borde del triángulo con el plano podría producir tres puntos de intersección, una situación geométricamente imposible. La razón por la que esto puede ocurrir en el cálculo es que, cuando se realizan cálculos en punto flotante, por ejemplo, formato IEEE, hay incertidumbres o "ruido numérico", en cada paso que afecta a la conclusión de si un borde interseca el plano. Cuando el plano interseca los bordes en una situación casi extraña, los puntos de intersección están cerca entre sí y la determinación de si un punto de intersección se encuentra dentro del borde es aleatorio. Aunque el ruido en los valores numéricos de los puntos es pequeño, la conclusión cualitativa de que hay más de dos puntos de intersección es geométricamente imposible y difícil de controlar correctamente en el algoritmo.
En segundo lugar, esta función está en el bucle crítico para cada borde de cada triángulo filtrado, por lo que es importante optimizar su eficiencia tanto como sea posible.
Para solucionar el primer problema de ruido numérico, realice los cálculos en enteros. Para solucionar el segundo problema de optimizar su eficiencia, almacene en caché el atributo más usado de cada vértice o el "producto de punto" asociado a cada vértice. Pasar a enteros es una manera típica de garantizar la coherencia geométrica. La idea básica es que si tienes que cuantizar, hazlo al principio. A continuación, los cálculos posteriores se pueden realizar en enteros y, si los enteros son lo suficientemente anchos como para que no haya peligro de desbordamiento, los cálculos se pueden realizar con precisión infinita. La siguiente función de cuantificación resulta útil para este propósito.
ScaleAndTruncate(x) = parte entera de x*10000
El factor de escalado 10000 significa que el número de punto flotante de entrada tiene cuatro posiciones decimales, lo que es lo suficientemente preciso para esta aplicación. Dependiendo del intervalo de valores del espacio de apariencia de color, desea elegir un tipo entero con bits lo suficientemente anchos como para contener los cálculos intermedios. En la mayoría de los espacios de apariencia de color, el intervalo de cada coordenada está dentro del intervalo de -1000 a 1000. La coordenada cuantificada tiene un valor absoluto máximo posible de 1000*10 000 = 10 000 000 000. Como verá, la cantidad intermedia es un producto de punto, que es una suma de dos productos de coordenadas, por lo que tiene un valor absoluto máximo posible de 2*(10.000.000)s = 2?10 ₁₄. El número de bits necesarios es el registro Robado (2?10 ₁₄ ) = 47.51. Una opción cómoda para el tipo entero es, por lo tanto, enteros de 64 bits.
Para garantizar que la intersección de un plano con un triángulo siempre proporciona un conjunto vacío o un conjunto de dos puntos, debe considerar el triángulo como un todo, no como bordes individuales del triángulo por separado. Para comprender la situación geométrica, considere las "distancias firmadas" de los vértices del triángulo del plano de matiz. No calcule estas distancias firmadas directamente; en su lugar, calcule los productos de puntos de los vectores de posición de los vértices con el vector normal cuantificado al plano. Más concretamente, durante la inicialización del plano de matiz, el vector normal cuantificado se calcula de la siguiente manera.
NormalVector = (ScaleAndTruncate(-sin(hue)), ScaleAndTruncate(cos(hue)))
Tenga en cuenta que este vector es un vector bidimensional. Puede usar un vector bidimensional porque el plano de matiz es vertical, por lo que el tercer componente del vector normal es siempre cero. Además, se inicializa una tabla de búsqueda de productos de puntos para tener una entrada para cada vértice de los triángulos de límite de gamut y el producto de punto correspondiente establecido en un valor no válido.
Durante una operación de intersección del plano de matiz con un triángulo, se busca el producto de punto de cada vértice del triángulo. Si el valor de la tabla de búsqueda es el valor no válido, el producto de puntos se calcula mediante la siguiente expresión.
NormalVector.a*ScaleAndTruncate(vértice.a) + NormalVector.b*ScaleAndTruncate(vertex.b)
De nuevo, nunca se usa el componente J del vértice, porque el vector normal es horizontal. A continuación, este producto de punto se guarda en la tabla de búsqueda para que no tenga que volver a calcularse si el producto de punto del vértice se consulta más adelante.
El almacenamiento en caché permite determinar rápidamente si un borde interseca el plano, después de que los productos de puntos se tabulan en la tabla de búsqueda, que se crea progresivamente a medida que se procesan los vértices.
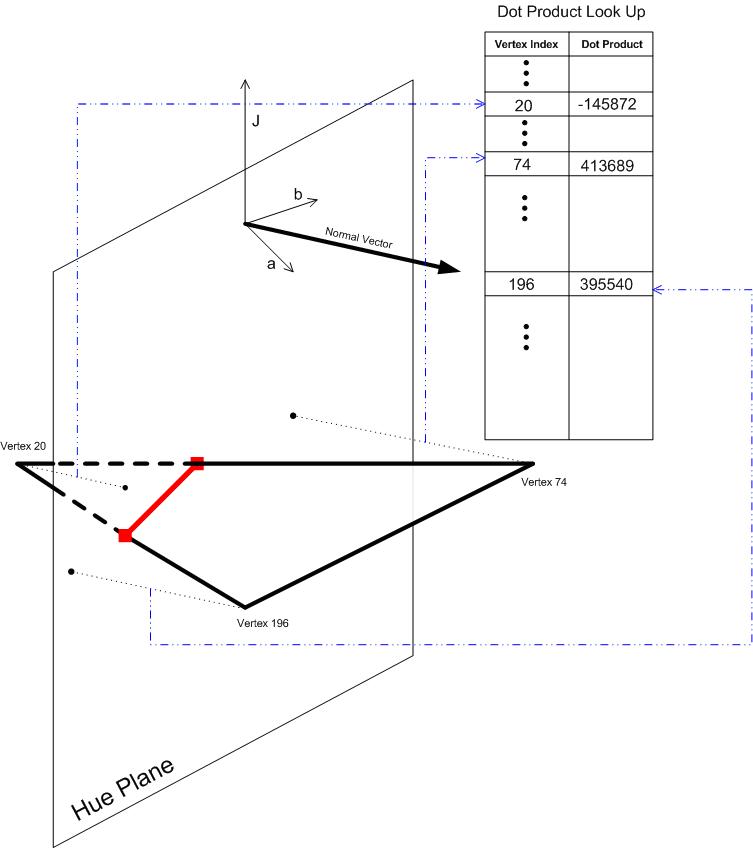
Figura 28 : Intersección del plano de tono con un triángulo
Para que el triángulo de la figura 28 intersece el plano de matiz en un segmento de línea no degenerado, los productos de puntos de los vértices deben estar en uno de los siguientes patrones, cuando se ordenan en orden ascendente.
0,0,+; -,0,0; -,0,+; -,-,+; -,+,+
Un punto final del segmento de línea surge cuando el plano se interseca por un borde con vértices que tienen signos diferentes en el producto de punto. Si el signo es cero, el vértice se encuentra justo en el plano y la intersección del borde con el plano es el propio vértice. Tenga en cuenta también que los casos 0,0,0; -,-,0; No se notifican 0,+,+ . El primer caso (0,0,0) significa que todo el triángulo se encuentra en el plano. Esto no se notifica porque cada borde del triángulo debe pertenecer a un triángulo vecino que no también se encuentra completamente en el plano. El borde se notificará cuando se considere ese triángulo. Los otros dos casos (-,-,0 y 0,+,+) corresponden a la configuración geométrica que el triángulo toca el plano en un vértice. Estos casos no se notifican porque no dan lugar a un segmento de línea no degenerado.
El algoritmo anterior determina cuándo calcular una intersección entre un borde del triángulo y el plano de matiz. Una vez determinado un borde, la intersección se calcula mediante ecuaciones paramétricas. Si uno de los productos de puntos es cero, la intersección es el propio vértice, por lo que no es necesario realizar ningún cálculo. Suponiendo que ambos productos de puntos de los vértices del borde no son cero, el vértice1 es el vértice con negativo punto de producto dotProduct1; y vértice2 es el vértice con positivo dot product dotProduct2. Este orden es importante para asegurarse de que el punto de intersección calculado no depende de cómo aparece la ordenación de los vértices en la representación del borde. El concepto geométrico del borde es simétrico con respecto a sus vértices. El aspecto computacional del uso de ecuaciones paramétricas del borde presenta asimetría (elección de vértice inicial), que puede dar un punto de intersección ligeramente diferente debido al ruido numérico y el acondicionamiento de las ecuaciones lineales que se van a resolver. Dicho esto, el punto de intersección, la intersección, se da a continuación.
t = dotProduct1/(dotProduct1 - dotProduct2)
intersección. J = vértice1. J + t * (vértice2. J - vértice1. J)
intersección.a = vértic1.a + t * (vértic2.a - vértic1.a)
intersection.b = vertex1.b + t * (vertex2.b - vertex1.b)
Operación de conversión: CheckGamut (continuación)
El algoritmo geométrico básico utilizado para la comprobación de la gama es contar el número de cruces de rayos. Para un punto de consulta determinado, considere un rayo que comienza con el punto de consulta y apunta hacia arriba (dirección J). Cuente el número de veces que este rayo cruza el límite de la gama. Si este número es par, el punto de consulta está fuera de gama. Si este número es impar, el punto está dentro. En principio, este algoritmo se puede implementar en 3D, generalmente se ve afectado por dificultades causadas por situaciones degeneradas, como el rayado (en parte) en un triángulo de límite o la degeneración dimensional inferior, como el rayado (en parte) en un borde de un triángulo de límite. Incluso en 2D, tienes que tratar con estas situaciones degeneradas; pero el problema es más sencillo y se ha solucionado de una manera satisfactoria. Vea [O'Rourke].
Para un punto de entrada determinado Jab, determine su ángulo de tono h como se indica a continuación.
h = atan(b/a),
Inicialice el plano de matiz y determine los elementos de línea de límite correspondientes a este plano de matiz. Dado que los elementos de línea de límite solo son relevantes si intersecan el rayo hacia arriba, configure un filtro de triángulos para quitar triángulos que dan elementos de línea que definitivamente no intersecarán el rayo hacia arriba. En este caso, considere el rectángulo delimitador del triángulo. El rayo hacia arriba no intersecará el triángulo si el punto de consulta está fuera de la "sombra" que convierte el cuadro de límite si una fuente de luz estaba directamente encima. Infla esto ligeramente con una tolerancia pre-fija para permitir ruido numérico para que no tire accidentalmente triángulos que podrían proporcionar elementos de línea útiles. El resultado es el cilindro rectangular semiin infinito que se muestra en la figura 29. Comprobar si el punto de consulta está dentro o fuera de este cilindro puede implementarse eficazmente mediante desigualdades simples.
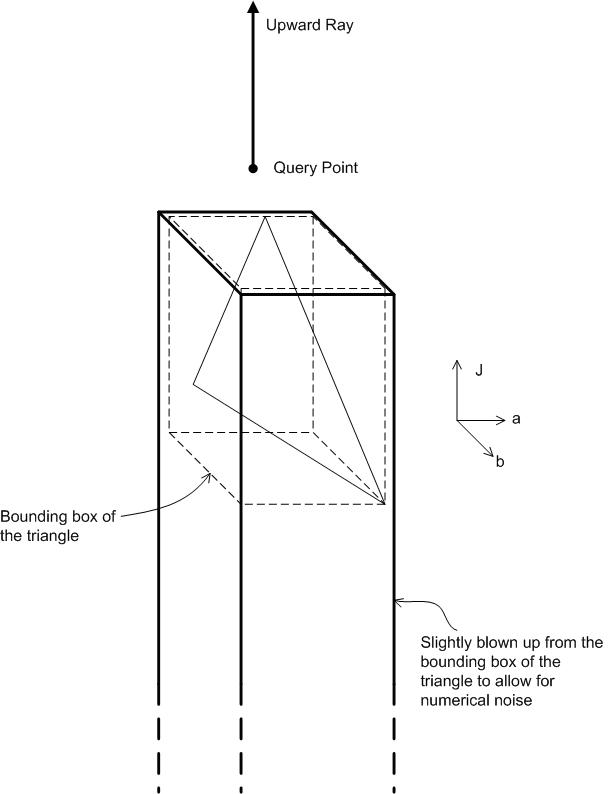
Figura 29: Filtro de triángulo para CheckGamut
CheckGamut tiene tres componentes específicos de la operación de mutación: datos procesados internos,procesador de elementos de líneay adaptador de salida de . El datos procesados internos es una lista de elementos de línea procesados por procesador de elementos de línea. En este caso, el procesador de elementos de línea simplemente agrega un elemento de línea a la lista. La estructura de datos interna para datos procesados internos puede ser una lista vinculada o una matriz que puede crecer en tamaño.
El adaptador de salida es un módulo que tiene acceso a la lista de elementos de línea, determina si un elemento de línea cruza el rayo ascendente (recuento 1) o no (recuento 0). Sumar todos estos recuentos proporciona un recuento total. El adaptador de salida , en última instancia, genera una respuesta de "sí" (en la gama) o "no" (fuera de la gama), dependiendo de si el recuento total es impar o incluso. El paso en el que se determina si un elemento de línea cruza el rayo hacia arriba merece cierta atención porque aquí es donde surge el problema de degeneración y también surge el problema del recuento excesivo. Después de [O'Rourke], para que un elemento de línea cruce el rayo, el punto de conexión derecho (el punto final con cromática más grande) debe estar estrictamente en el lado derecho del rayo. Esto garantiza que, si un punto final se encuentra exactamente en el rayo, solo se cuenta una vez. La misma regla también resuelve la situación degenerada en la que el elemento de línea se encuentra exactamente en el rayo. No incrementa el recuento de este elemento de línea.
En la figura 30 se muestran los elementos de línea resultantes de una gama de ejemplo con el punto de consulta en varias posiciones.
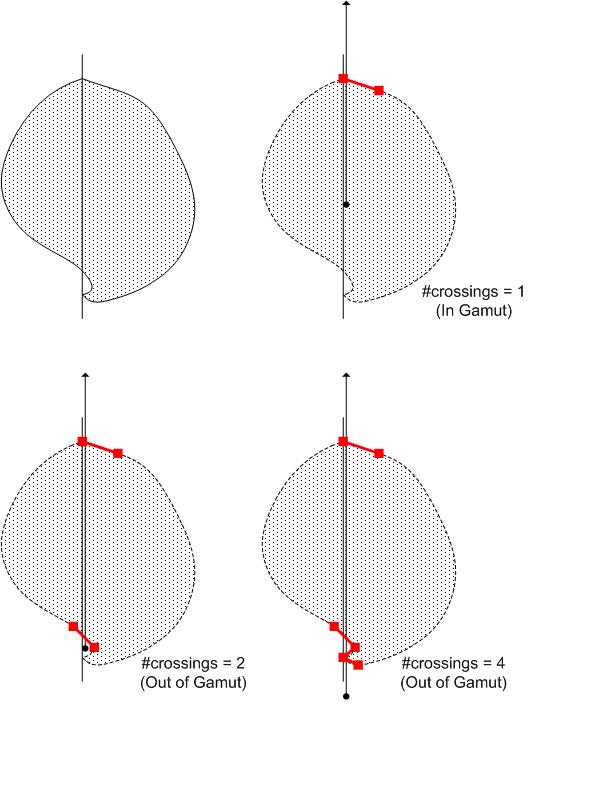
Figura 30: Funcionamiento de CheckGamut
Asignación de gamut de diferencia de color mínima
La asignación de la diferencia mínima de color, MinDEMap, tiene una especificación sencilla: si un color está en la gama, no haga nada. Si un color está fuera de la gama, prodíjalo al punto "más cercano" en el límite de la gama. La palabra clave "más cercana" no está bien definida hasta que se especifica la ecuación de diferencia de color que se va a usar. En la práctica, para facilitar y acelerar el cálculo, la distancia euclidiana del espacio de apariencia de color elegido, o una variante de ella, se usa como métrica de diferencia de color. La ventaja de la métrica euclidiana es que es compatible con el producto de punto del espacio, lo que permite usar álgebra lineal. En detalle, si se define un "producto de punto" en el espacio, se puede definir una distancia como la raíz cuadrada del producto de punto del vector de diferencia con sí mismo. Un producto de punto generalmente se puede definir mediante una matriz positiva 3x3 A.
u?v = u T Av
donde el lado derecho es la multiplicación de matriz habitual. Si A es la matriz de identidades, se recupera el producto de punto estándar. En la práctica, si Jab es el espacio de color, no desea mezclar los componentes, por lo que se puede usar una matriz diagonal distinta de la matriz de identidad. Además, es posible que desee mantener la escala en un y b sin cambios para que se conserve la medida de matiz. Por lo tanto, una variación útil del producto de punto euclideano estándar es la siguiente.
w J (componente J de usted)(componente J de v) + (un componente de usted)(un componente de v) + (componente b de usted)(componente b de v)
donde w J es un número positivo. Una variación adicional consiste en permitir que w J variar con el punto de consulta de entrada:
w J\ = w J (queryPoint)
El resultado final es una medida de distancia que es asimétrica con respecto a los dos puntos, y con diferentes pesos relativos sobre la ligereza y el color o tono a medida que el punto de consulta de entrada varía. Esto está de acuerdo con algunas observaciones sobre la percepción del color humano de que las diferencias de color no se ponderan igual en todas las dimensiones. Se ha encontrado que las personas son menos sensibles a las diferencias de ligereza que las diferencias en el tono y el cromático.
La siguiente función de peso es útil.
w J = k ₁ (C - C mₐₓ ) n
donde k ₐ = 1, k ₁ = 0,75/(C mₐₓ ) n, C mₐₓ = 100, n = 2 y C es el más pequeño de cromática del punto de consulta y C mₐₓ.
para que un peso de 0,25 se ponga en el término J cuando cromática es cero, y un peso de 1 cuando cromática es 100. La tendencia de poner menos peso en J cuando el cromático es pequeño, y más peso en J cuando cromática es grande sigue el uso recomendado para CMC y CIEDE2000.
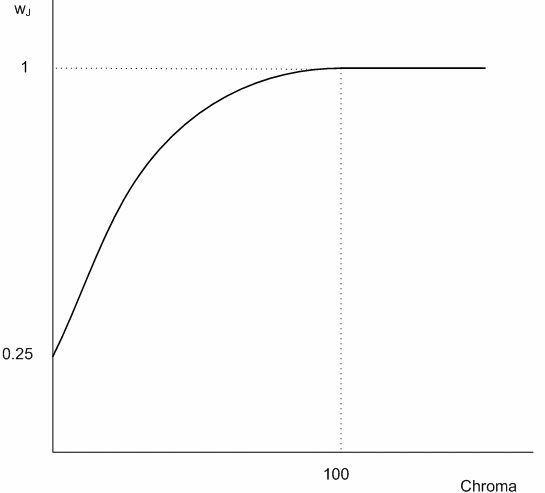
Figura 31 : función de peso en el componente J de la métrica
Use el espacio jab para el ejemplo siguiente. Es computacionalmente exigente buscar en todos los triángulos de límite para determinar el punto más cercano de la métrica euclidiana. A continuación se muestra un enfoque sencillo para hacer que este proceso sea lo más eficaz posible, sin introducir suposiciones adicionales que puedan acelerar el proceso, sino que también terminan en una respuesta aproximada. En primer lugar, es necesario comprender el procedimiento geométrico de proyectar un punto en el triángulo dado. Aquí se ofrece una descripción.
Se realiza primero una proyección ortogonal en el plano infinito que contiene el triángulo. La distancia más corta del punto de consulta desde el plano se puede determinar en dos pasos.
(a) Calcular el vector normal de unidad en el triángulo.
(b) Calcular el producto de punto del vector normal de unidad y un vector formado desde el punto de consulta y un punto del triángulo; es decir, uno de sus vértices. Dado que el vector normal tiene longitud unitaria, el valor absoluto de este producto de punto es la distancia del punto de consulta desde el plano.
Es posible que el punto proyectado no sea la respuesta, ya que podría estar fuera del triángulo. Por lo tanto, primero debe realizar una comprobación. El cálculo es equivalente a calcular las coordenadas barycéntricas del punto proyectado en relación con el triángulo. Si el punto proyectado se determina que está dentro del triángulo, es la respuesta. Si no es así, el punto más cercano se adquiere en uno de los bordes del triángulo. Realice una búsqueda en cada uno de los tres bordes. Determinar la proyección del punto de consulta en un borde es un proceso similar a la proyección en el triángulo, pero una dimensión menos. Se calcula primero una proyección ortogonal. Si el punto proyectado se encuentra en el borde, es la respuesta. Si no es así, el punto más cercano se adquiere en uno de los dos puntos finales. Realizar una búsqueda en los dos puntos finales; es decir, calcule la distancia de punto de consulta de cada una y compare cuál es menor.
Un examen cuidadoso revela que hay una gran cantidad de búsquedas repetidas cuando se recorren todos los triángulos porque un borde siempre es compartido por dos triángulos y un vértice compartido por al menos tres bordes. Además, no te interesa encontrar el punto más cercano a un triángulo determinado; en su lugar, está interesado en encontrar el punto más cercano a todo el límite de la gama. Sin embargo, un triángulo determinado sería el en el que se logra esto. Hay dos estrategias que puede usar para acelerar la búsqueda.
estrategia I. Cada vértice se procesará, como máximo, una vez. Cada borde se procesará, como máximo, una vez.
estrategia II. En cualquier momento de la búsqueda, tiene un mejor candidato con la mejor distancia correspondiente. Si puede determinar, mediante una comprobación rápida, que un triángulo no es capaz de proporcionar una mejor distancia, no es necesario continuar el cálculo más allá. No necesita el punto y la distancia más cercanos para este triángulo.
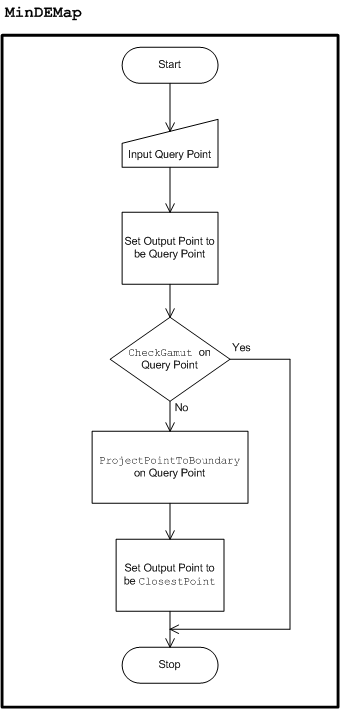
Figura 32: Esquemas mínimos de asignación de DE
En la figura 32 se muestra el flujo general de lógica para el mapa de gama MinDEMap. Para un punto de consulta, primero se invoca la función CheckGamut. Si el punto está en la gama, el mapa es un no-op. Si el punto está fuera de gama, llame a ProjectPointToBoundary. Ahora pase a la figura 33. En este momento, se supone que se han calculado los siguientes valores.
(a) Vector normal unidad a cada triángulo de límite de gama con respecto al producto de punto estándar.
(b) lista de vértices y lista de bordes, además de la lista de triángulos.
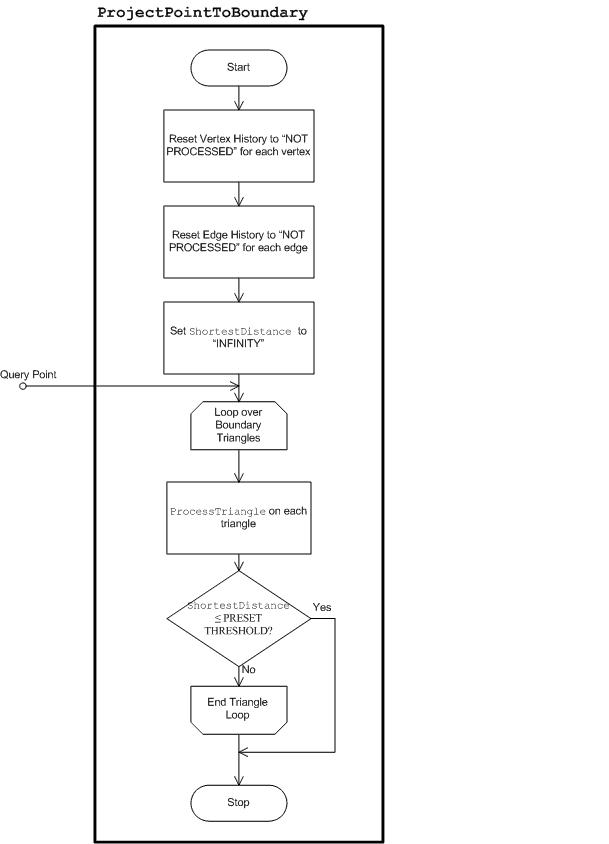
Figura 33 : La rutina ProjectPointToBoundary
Todas estas son sobrecargas constantes y habrían disminuido el costo si se realizan suficientes consultas a este límite de gama. Normalmente, este es el caso cuando se crea una transformación LUT de un dispositivo a otro, donde solo hay dos gamas fijas y la LUT de transformación se ejecuta a través de puntos en la cuadrícula de muestreo uniforme. Puede calcular previamente los vectores normales con respecto al producto de punto estándar, aunque la noción de perpendicularidad se basará en el producto de punto ponderado, que depende del punto de consulta, tal como se explicó anteriormente. El motivo es que un vector normal con respecto al producto de puntos ponderados se puede obtener fácilmente del vector normal con respecto al producto de punto estándar. Si n ₀ es un vector normal con respecto al producto de punto estándar, entonces
n = (componente J de n ₀ /w J, a-component of n₀, b-component of n ₀ )
es normal para el triángulo con respecto al producto de punto ponderado. Debido a esta relación, sigue siendo beneficioso calcular previamente n ₀ aunque se deba ajustar en función del punto de consulta.
La rutina ProjectPointToBoundary comienza restableciendo el "historial procesado" de los vértices y bordes. Estas son tablas de marcas BOOLEAN que realizan un seguimiento de si se ha visitado un vértice o borde antes. También restablece la variable ShortestDistance a "INFINITY", que es el valor máximo codificado en el sistema de números de punto flotante usado. A continuación, se ejecuta a través de un bucle, buscando el punto más cercano de cada triángulo mediante la llamada a ProcessTriangle. ProcessTriangle es la rutina para actualizar la variable ShortestDistance y está claramente en el bucle crítico. Una optimización es detener cuando el resultado es lo suficientemente bueno. Después de cada llamada a ProcessTriangle, se examina la variable ShortestDistance. Si satisface un umbral predefinido, puede detenerlo. El umbral predefinido depende del espacio de color usado y de la precisión necesaria del sistema de imágenes de color. Para una aplicación típica, no desea realizar un trabajo innecesario si la diferencia de color es menor que lo que la visión humana puede distinguir. Para CIECAM02, esta diferencia de color es 1. Sin embargo, use un valor de umbral de 0,005 en la implementación para conservar la precisión de los cálculos, ya que esto podría ser solo un paso intermedio en una cadena de transformaciones.
ProcessTriangle implementa la estrategia II anterior. Obtener un vector normal del vector normal de la unidad calculada previamente al triángulo con respecto al producto de punto estándar, calcula la distancia del punto de consulta al plano infinito que contiene el triángulo formando el producto de punto del vector normal de unidad y queryVector, el vector de uno de los vértices del triángulo, vértice1, al punto de consulta, queryPoint.
queryVector = queryPoint - vértic1
distance = | normalVector * queryVector |/||normalVector||
Se trata de un cálculo relativamente económico y la distancia es necesaria para realizar cálculos adicionales. Si esta distancia no es menor que la mejor distancia actual, ShortestDistance, este triángulo no producirá una mejor distancia, ya que no dará una mejor distancia que el plano que lo contiene. En este caso, se devuelve el control al bucle de triángulos. Si la distancia es menor que ShortestDistance, potencialmente, tiene un punto más cercano, si este punto se encuentra dentro del triángulo. Debe realizar algunos cálculos "duros" (aunque nada más allá del álgebra lineal) para determinarlo. Si los otros dos vértices del triángulo son vértices2 y vértices3, formen los vectores base firstBasisVector y secondBasisVector.
firstBasisVector = vértic2 - vértice1
secondBasisVector = vértic3 - vértice1
Use el siguiente sistema lineal de ecuaciones para resolver los desconocidos que usted y v.
firstBasisVector * queryVector = (firstBasisVector * firstBasisVector)u + (firstBasisVector * secondBasisVector)v
secondBasisVector * queryVector = (secondBasisVector * firstBasisVector)u + (secondBasisVector * secondBasisVector)v
y las condiciones para que el punto proyectado se encuentre dentro del triángulo son:
0 ≤ u ≤ 1, 0 ≤ v ≤ 1 y usted + v ≤ 1
Después de este cálculo, si se determina que el punto proyectado se encuentra dentro del triángulo, entonces ha encontrado un nuevo punto más cercano; la distancia que calculó al principio es la distancia más corta. En este caso, actualice las variables ShortestDistance y ClosestPoint. Si el punto proyectado se encuentra fuera del triángulo, es posible que encuentre un punto más cercano en uno de sus bordes. Por lo tanto, puede llamar a la rutina ProcessEdge en cada uno de los tres bordes.
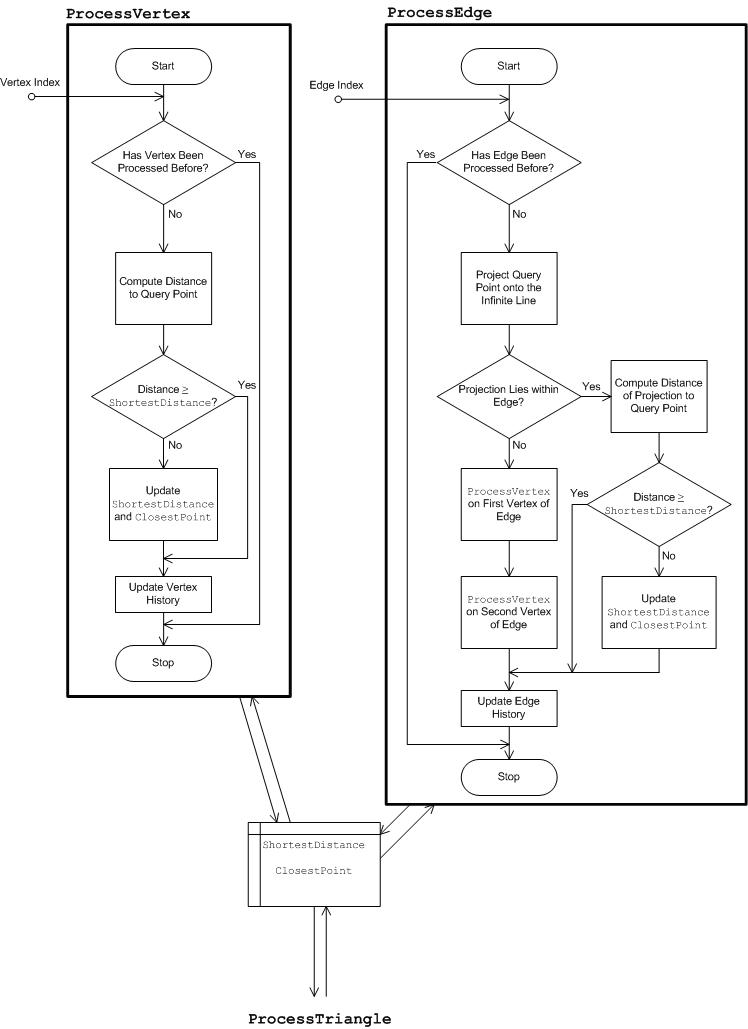
Figura 34: Rutinas ProcessEdge y ProcessVertex
La rutina ProcessEdge implementa la estrategia I, que se muestra en la figura 34. ProcessEdge comienza comprobando si el borde se ha procesado antes. Si es así, no se realiza ninguna otra acción. Si no es así, continúa calculando la proyección ortogonal del punto de consulta en la línea infinita que contiene el borde. El álgebra lineal implicada en el cálculo es similar a las ecuaciones de triángulos anteriores. Sin embargo, el cálculo es más sencillo, no se describe aquí. Si el punto proyectado se encuentra dentro del borde, encontrará la distancia del punto proyectado desde el punto de consulta. Si esta distancia es menor que ShortestDistance, ha encontrado un nuevo punto más cercano. Actualice ShortestDistance y ClosestPoint. Si el punto proyectado se encuentra fuera del borde, llame a ProcessVertex en los dos puntos finales. Antes de devolver el control, actualice el historial de bordes para que este borde se marque como "PROCESADO".
Por último, proporcione una descripción de ProcessVertex. La rutina ProjectVertex también implementa la estrategia I y mantiene una tabla de historial de vértices. Como se muestra en la figura 34, primero comprueba si el vértice se ha procesado antes. Si es así, no se realiza ninguna otra acción. Si no es así, continúa calculando la distancia del vértice desde el punto de consulta. Si la distancia es menor que ShortestDistance, actualice ShortestDistance y ClosestPoint. Al final, actualiza el historial de vértices para que este vértice se marque como "PROCESADO".
Cuando el bucle de control externo ha agotado todos los triángulos o se ha cerrado antes de que se haya alcanzado el umbral de diferencia de color, se obtiene acceso a la variable ClosestPoint. Este es el resultado de MinDEMap. El autor de la llamada también puede recuperar ShortestDistance si está interesado en la distancia con la que se encuentra el color asignado del color de la consulta.
Suavizado de tono
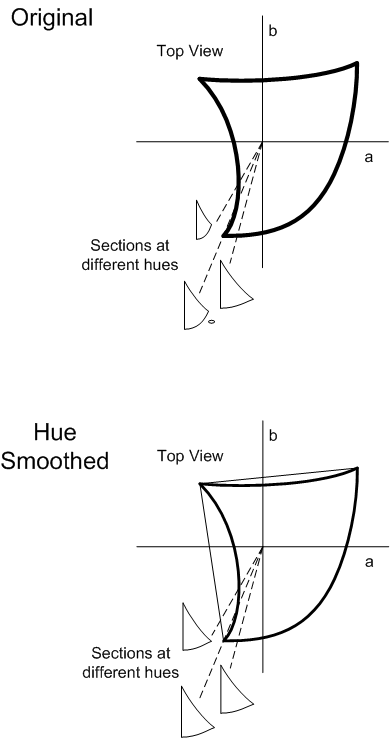
Figura 35 : Suavizado de tono
Se produce un problema con las operaciones restringidas por matiz; es decir, la operación solo tiene en cuenta las variables dentro de un plano de matiz. En la figura 35 se muestra un ejemplo de una gama que muestra segmentos de tono "discontinuos" en los tonos azules. Dentro de este intervalo de matiz, para ciertos ángulos de matiz, el límite de la gama es tangencial al plano de matiz. En efecto, esto provoca un cambio en la estructura topológica de los segmentos de matiz. En el ejemplo que se muestra, como el plano de matiz se barre a través de este intervalo de matiz, surge una "isla" y se sumerge. Este cambio en la topología hará que las operaciones específicas de matiz sean discontinuas. Por ejemplo, el en el matiz fijo cambiará abruptamente a medida que cambia el ángulo de matiz en este rango.
Hay una razón de ciencia de colores por la que es deseable conservar el tono en determinadas operaciones. Para resolver el problema anterior, los triángulos de límite de gamut originales deben ser "suavizados de tono". Por lo general, un suavizado de tono de un conjunto de triángulos de límites de gama es un conjunto de triángulos de tal forma que (a) forma el límite de una nueva "gama", que podría no corresponder a la gama real del dispositivo, y que contiene la gama definida por el conjunto original de triángulos; y (b) los triángulos del nuevo conjunto se delimitan de ser paralelos a los planos de matiz.
Una manera práctica de obtener un conjunto suavizado de tonos de triángulos es tomar el casco convexa de los vértices originales. Como se muestra en la figura 35, los segmentos de tono del casco convexa varían sin problemas en el intervalo de matiz problemático sin un cambio repentino en la topología.
Establecer las principales y secundarias en la descripción del límite de gamut
Algunos métodos de asignación de gama, como HueMap, dependen de la ubicación de los dispositivos principales y secundarios. Para los dispositivos aditivos, los principales son rojo, verde y azul (R, G y B); y los secundarios son cian, magenta y amarillo (C, M e Y). En el caso de los dispositivos restivos, las principales son C, M e Y; y los secundarios son R, G y B. El GBD realiza un seguimiento de los seis valores, además de blanco y negro (W y K), en una matriz de valores de color jab. Estos valores se establecen en la descripción del límite de gama cuando se crea. En el caso de los dispositivos de salida, las principales se pueden determinar mediante la ejecución de combinaciones de valores de control de dispositivos a través del modelo de dispositivo. En el caso de los dispositivos de captura, este enfoque no es adecuado para crear el GBD de referencia, ya que es casi imposible capturar una imagen que produce un valor de dispositivo puro totalmente saturado, como (0,0, 0,0, 1,0). Los perfiles de dispositivo WCS contienen los índices de las principales en el destino de captura. Dado que estos valores no están contenidos en un perfil icc, use los valores medidos a partir de un objetivo típico del escáner después de la conversión a Jab, en relación con las condiciones de visualización de ICC.
Establecer el eje neutro en la descripción del límite de gama
Los métodos de asignación de la gama MinCD y HueMap usan el eje neutro del dispositivo para el enderezamiento. Para los dispositivos de salida de línea base, el eje neutro se puede determinar ejecutando valores neutros del dispositivo (R=G=B o C=M=Y) a través del método DeviceToColorimetric y, a continuación, a través del método ColorimetricToAppearance del objeto CIECAM02. Sin embargo, los dispositivos de captura no siempre devuelven un valor neutro del dispositivo cuando se presenta una muestra neutra. Esto es especialmente cierto cuando la iluminación ambiente no es perfectamente neutra. Los perfiles de dispositivo WCS contienen los índices de las muestras neutras del destino. Use esos ejemplos para establecer el eje neutro. Dado que esta información no está disponible para los perfiles icc, debe usar el mismo método que se usa para los dispositivos de salida; ejecute ejemplos neutros del dispositivo a través del método DeviceToColorimetric y, a continuación, aparee los valores de entrada y los resultados de colorimetric.
Temas relacionados