Opérations d’analyse spatiale
Important
Le 30 mars 2025, l’analyse spatiale d’Azure AI Vision sera mise hors service. Veuillez passer à Azure AI Video Indexer ou à une autre solution open source avant la date spécifiée. Nous vous encourageons à effectuer la transition au plus tôt pour bénéficier des avantages d’Azure AI Video Indexer. En plus des fonctionnalités familières que vous utilisez, voici une comparaison rapide entre l’analyse spatiale d’Azure AI Vision et Azure AI Video Indexer.
| Fonctionnalité | Analyse spatiale Azure AI Vision | Azure AI Video Indexer |
|---|---|---|
| Prise en charge d’Edge | Oui | Oui |
| Détection d’objet | Détection des personnes et des véhicules uniquement | Détecte plus de 1 000 objets |
| Traitement audio/vocal | Non pris en charge | Pris en charge (inclut la transcription vocale, la traduction et le résumé) Pris en charge >(inclut la transcription vocale et l’analyse des sentiments) |
| Détection et suivi d’événements | Pris en charge (suivi des personnes et des véhicules, détection d’événements) | Pas encore pris en charge sur Edge. Partiellement pris en charge dans le cloud. |
| Prise en charge d’Azure Arc | Non pris en charge | Prise en charge native |
| Centres d’intérêt | Analyse visuelle avec suivi spécialisé | Analyse complète du contenu audio et du contenu visuel |
Jusqu’au 30 mars 2025, vous pouvez continuer à utiliser l’analyse spatiale d’Azure AI Vision ou passer à Azure AI Video Indexer avant la date spécifiée. Après le 30 mars 2025, le conteneur Analyse spatiale ne sera plus pris en charge et cessera de traiter de nouveaux flux.
L’analyse spatiale vous permet d’analyser les flux vidéo des caméras en temps réel. Pour chaque caméra que vous configurez, les opérations d’analyse spatiale génèrent un flux de sortie de messages JSON envoyés à votre instance Azure IoT Hub.
Le conteneur d’analyse spatiale implémente les opérations suivantes. Vous pouvez configurer ces opérations dans le manifeste de déploiement de votre conteneur.
| Identificateur d'opération | Description |
|---|---|
cognitiveservices.vision.spatialanalysis-personcount |
Compte les personnes dans une zone désignée dans le champ de vue de la caméra. La zone doit être entièrement couverte par une seule caméra pour permettre à PersonCount d’enregistrer un total précis. Émet un événement initial personCountEvent, puis des événements personCountEvent lorsque le nombre change. |
cognitiveservices.vision.spatialanalysis-personcrossingline |
Effectue le suivi lorsqu’une personne traverse une ligne désignée dans le champ de vue de la caméra. Émet un événement personLineEvent lorsque la personne traverse la ligne, et fournit des informations directionnelles. |
cognitiveservices.vision.spatialanalysis-personcrossingpolygon |
Émet un événement personZoneEnterExitEvent quand une personne entre ou quitte la zone désignée, et fournit des informations directionnelles avec le côté de la zone qui a été franchie. Émet un événement personZoneDwellTimeEvent quand la personne quitte la zone et fournit des informations directionnelles ainsi que le nombre de millisecondes que la personne a passées à l’intérieur de la zone. |
cognitiveservices.vision.spatialanalysis-persondistance |
Effectue le suivi lorsqu’une personne enfreint une règle de distance minimale. Émet régulièrement un personDistanceEvent avec l’emplacement de chaque infraction de distance. |
cognitiveservices.vision.spatialanalysis |
Opération générique qui peut être utilisée pour exécuter tous les scénarios mentionnés ci-dessus. Cette option est plus utile lorsque vous souhaitez exécuter plusieurs scénarios sur la même caméra ou utiliser des ressources système (par exemple, le GPU) de manière plus efficace. |
Toutes les opérations ci-dessus sont également disponibles dans la version .debug du service (par exemple, cognitiveservices.vision.spatialanalysis-personcount.debug). Le débogage permet de visualiser les images vidéo à mesure qu’elles sont traitées. Vous devrez exécuter xhost + sur l’ordinateur hôte pour activer la visualisation des images et des événements vidéo.
Important
Les modèles d’IA de la Vision Azure AI détectent et localisent la présence humaine dans les images vidéo, et génèrent un cadre englobant autour du corps de la personne détectée. Les modèles d’IA n’essaient pas de découvrir les identités ou données démographiques des individus.
Paramètres d’opération
Les paramètres suivants sont exigés par chacune des opérations d’analyse spatiale.
| Paramètres d’opération | Description |
|---|---|
Operation ID |
Identificateur d’opération de la table ci-dessus. |
enabled |
Booléen : true ou false |
VIDEO_URL |
URL RTSP de la caméra (exemple : rtsp://username:password@url). L’analyse spatiale prend en charge les flux encodés en H.264 via RTSP, http ou mp4. Video_URL peut être fourni en tant que valeur de chaîne base64 masquée à l’aide du chiffrement AES, et si l’URL de la vidéo est masquée, KEY_ENV et IV_ENV doivent être fournis en tant que variables d’environnement. L’exemple d’utilitaire permettant de générer des clés et un chiffrement est disponible ici. |
VIDEO_SOURCE_ID |
Nom convivial de la caméra ou du flux vidéo. Retourné avec la sortie JSON de l’événement. |
VIDEO_IS_LIVE |
True pour les caméras ; false pour les vidéos enregistrées. |
VIDEO_DECODE_GPU_INDEX |
Le GPU pour décoder la trame vidéo. 0 par défaut. Doit être identique à gpu_index dans les autres configurations de nœud, comme DETECTOR_NODE_CONFIG et CAMERACALIBRATOR_NODE_CONFIG. |
INPUT_VIDEO_WIDTH |
Largeur d’image de la vidéo/du flux d’entrée (par exemple, 1920). Il s’agit d’un champ facultatif. S’il est fourni, l’image est mise à l’échelle avec cette dimension, tout en préservant les proportions. |
DETECTOR_NODE_CONFIG |
JSON indiquant le GPU sur lequel exécuter le nœud de détecteur. Il doit être au format suivant : "{ \"gpu_index\": 0 }", |
TRACKER_NODE_CONFIG |
JSON indiquant s’il faut, ou non, calculer la vitesse dans le nœud de suivi. Il doit être au format suivant : "{ \"enable_speed\": true }", |
CAMERA_CONFIG |
JSON indiquant les paramètres de caméra étalonnée pour plusieurs caméras. Si la compétence que vous avez utilisée nécessite un étalonnage et que vous avez déjà les paramètres de la caméra, vous pouvez utiliser cette configuration pour les fournir directement. Doit respecter le format suivant : "{ \"cameras\": [{\"source_id\": \"endcomputer.0.persondistancegraph.detector+end_computer1\", \"camera_height\": 13.105561256408691, \"camera_focal_length\": 297.60003662109375, \"camera_tiltup_angle\": 0.9738943576812744}] }" ; source_id est utilisé pour identifier chaque caméra. Il peut être obtenu à partir de la valeur source_info de l’événement que nous avons publié. Il ne prend effet que quand do_calibration=false dans DETECTOR_NODE_CONFIG. |
CAMERACALIBRATOR_NODE_CONFIG |
JSON indiquant le GPU sur lequel exécuter le nœud de calibrage de la caméra et s’il faut ou non utiliser le calibrage. Il doit être au format suivant : "{ \"gpu_index\": 0, \"do_calibration\": true, \"enable_orientation\": true}", |
CALIBRATION_CONFIG |
JSON indiquant les paramètres permettant de contrôler le fonctionnement du calibrage de la caméra. Il doit être au format suivant : "{\"enable_recalibration\": true, \"quality_check_frequency_seconds\": 86400}", |
SPACEANALYTICS_CONFIG |
Configuration JSON pour la zone et la ligne, comme indiqué ci-dessous. |
ENABLE_FACE_MASK_CLASSIFIER |
True pour activer la détection des personnes qui portent des masques dans le flux vidéo, False pour la désactiver. Par défaut, cette fonctionnalité est désactivée. La détection des masques nécessite que le paramètre de largeur de vidéo d’entrée soit égal à 1920 ("INPUT_VIDEO_WIDTH": 1920). L’attribut de masque n’est pas retourné si les personnes détectées ne font pas face à la caméra ou sont trop éloignées de celle-ci. Pour plus d’informations, consultez Guide de positionnement de la caméra. |
STATIONARY_TARGET_REMOVER_CONFIG |
Code JSON indiquant les paramètres de suppression des cibles stationnaires, qui ajoutent la capacité d’apprendre et d’ignorer les cibles faussement positives et stationnaires à long terme, telles que les mannequins de vitrine ou les personnes représentées sur des affiches. La configuration doit être au format suivant : "{\"enable\": true, \"bbox_dist_threshold-in_pixels\": 5, \"buffer_length_in_seconds\": 3600, \"filter_ratio\": 0.2 }" |
Paramètres du nœud de détection
Voici un exemple de paramètres DETECTOR_NODE_CONFIG pour toutes les opérations d’analyse spatiale.
{
"gpu_index": 0,
"enable_breakpad": false
}
| Nom | Type | Description |
|---|---|---|
gpu_index |
string | Index GPU sur lequel cette opération s’exécutera. |
enable_breakpad |
bool | Indique s’il faut activer la fonctionnalité breakpad, qui est utilisée pour générer le vidage sur incident à des fins de débogage. La valeur par défaut de ce paramètre est false. Si vous le définissez sur true, vous devez également ajouter "CapAdd": ["SYS_PTRACE"] dans la HostConfig partie du conteneur createOptions. Par défaut, le vidage sur incident est chargé sur l’application AppCenter RealTimePersonTracking ; si vous souhaitez que les vidages sur incident soient chargés sur votre application AppCenter, vous pouvez remplacer la variable d’environnement RTPT_APPCENTER_APP_SECRET par le secret d’application de votre application. |
Paramètres du nœud de calibrage de la caméra
Voici un exemple de paramètres CAMERACALIBRATOR_NODE_CONFIG pour toutes les opérations d’analyse spatiale.
{
"gpu_index": 0,
"do_calibration": true,
"enable_breakpad": false,
"enable_orientation": true
}
| Nom | Type | Description |
|---|---|---|
do_calibration |
string | Indique que l’étalonnage est activé. do_calibration doit avoir la valeur true pour que cognitiveservices.vision.spatialanalysis-persondistance fonctionne correctement. do_calibration est défini par défaut sur True. |
enable_breakpad |
bool | Indique s’il faut activer la fonctionnalité breakpad, qui est utilisée pour générer le vidage sur incident à des fins de débogage. La valeur par défaut de ce paramètre est false. Si vous le définissez sur true, vous devez également ajouter "CapAdd": ["SYS_PTRACE"] dans la HostConfig partie du conteneur createOptions. Par défaut, le vidage sur incident est chargé sur l’application AppCenter RealTimePersonTracking ; si vous souhaitez que les vidages sur incident soient chargés sur votre application AppCenter, vous pouvez remplacer la variable d’environnement RTPT_APPCENTER_APP_SECRET par le secret d’application de votre application. |
enable_orientation |
bool | Indique si vous voulez calculer, ou non, l’orientation pour les personnes détectées. enable_orientation est défini par défaut sur True. |
Configuration du calibrage
Il s’agit d’un exemple de paramètres CALIBRATION_CONFIG pour toutes les opérations d’analyse spatiale.
{
"enable_recalibration": true,
"calibration_quality_check_frequency_seconds": 86400,
"calibration_quality_check_sample_collect_frequency_seconds": 300,
"calibration_quality_check_one_round_sample_collect_num": 10,
"calibration_quality_check_queue_max_size": 1000,
"calibration_event_frequency_seconds": -1
}
| Nom | Type | Description |
|---|---|---|
enable_recalibration |
bool | Indique si le réétalonnage automatique est activé. La valeur par défaut est true. |
calibration_quality_check_frequency_seconds |
int | Nombre minimal de secondes entre chaque contrôle de qualité pour déterminer si le réétalonnage est nécessaire. La valeur par défaut est 86400 (24 heures). Utilisé uniquement si enable_recalibration=True. |
calibration_quality_check_sample_collect_frequency_seconds |
int | Nombre minimal de secondes entre la collecte de nouveaux échantillons de données pour le réétalonnage et le contrôle de la qualité. La valeur par défaut est 300 (5 minutes). Utilisé uniquement si enable_recalibration=True. |
calibration_quality_check_one_round_sample_collect_num |
int | Nombre minimal de nouveaux échantillons de données à collecter par cycle de collecte d’échantillons. La valeur par défaut est 10. Utilisé uniquement si enable_recalibration=True. |
calibration_quality_check_queue_max_size |
int | Nombre maximal d’échantillons de données à stocker quand le modèle de caméra est étalonné. La valeur par défaut est 1000. Utilisé uniquement si enable_recalibration=True. |
calibration_event_frequency_seconds |
int | Fréquence de sortie (en secondes) des événements d’étalonnage de l’appareil photo. La valeur -1 indique que l’étalonnage de la caméra ne doit pas être envoyé, sauf si les informations d’étalonnage ont été modifiées. La valeur par défaut est -1. |
Sortie d’étalonnage de l’appareil photo
Voici un exemple de sortie de l’étalonnage de la caméra si celui-ci est activé. Les points de suspension indiquent la présence d’objets du même type dans une liste.
{
"type": "cameraCalibrationEvent",
"sourceInfo": {
"id": "camera1",
"timestamp": "2021-04-20T21:15:59.100Z",
"width": 512,
"height": 288,
"frameId": 531,
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 13.294151306152344,
"focalLength": 372.0000305175781,
"tiltupAngle": 0.9581864476203918,
"lastCalibratedTime": "2021-04-20T21:15:59.058"
}
},
"zonePlacementInfo": {
"optimalZoneRegion": {
"type": "POLYGON",
"points": [
{
"x": 0.8403755868544601,
"y": 0.5515320334261838
},
{
"x": 0.15805946791862285,
"y": 0.5487465181058496
}
],
"name": "optimal_zone_region"
},
"fairZoneRegion": {
"type": "POLYGON",
"points": [
{
"x": 0.7871674491392802,
"y": 0.7437325905292479
},
{
"x": 0.22065727699530516,
"y": 0.7325905292479109
}
],
"name": "fair_zone_region"
},
"uniformlySpacedPersonBoundingBoxes": [
{
"type": "RECTANGLE",
"points": [
{
"x": 0.0297339593114241,
"y": 0.0807799442896936
},
{
"x": 0.10015649452269171,
"y": 0.2757660167130919
}
]
}
],
"personBoundingBoxGroundPoints": [
{
"x": -22.944068908691406,
"y": 31.487680435180664
}
]
}
}
Consultez Sortie de l’opération d’analyse spatiale pour plus de détails sur source_info.
| Nom du champ ZonePlacementInfo | Type | Description |
|---|---|---|
optimalZonePolygon |
object | Polygone dans l’image de l’appareil photo dans lequel il est possible de placer des lignes ou des zones pour vos opérations en vue de résultats optimaux. Chaque paire de valeurs représente x et y pour les vertex d’un polygone. Le polygone représente les zones dans lesquelles les personnes sont suivies ou comptées, et les points de polygone sont basés sur des coordonnées normalisées (0-1), où le coin supérieur gauche est (0,0, 0,0) et le coin inférieur droit est (1,0, 1,0). |
fairZonePolygon |
object | Polygone dans l’image de l’appareil photo dans lequel il est possible de placer des lignes ou des zones pour vos opérations en vue de résultats corrects, mais éventuellement pas optimaux. Consultez optimalZonePolygon ci-dessus pour obtenir une explication détaillée du contenu. |
uniformlySpacedPersonBoundingBoxes |
list | Liste des zones englobantes des personnes dans l’image de l’appareil photo, distribuées uniformément dans l’espace réel. Les valeurs sont basées sur les coordonnées normalisées (0-1). |
personBoundingBoxGroundPoints |
list | Liste de coordonnées au niveau du sol par rapport à l’appareil photo. Chaque coordonnée correspond au coin inférieur droit du cadre englobant dans uniformlySpacedPersonBoundingBoxes avec le même index. Pour plus de détails sur le calcul des coordonnées au niveau du sol, consultez les champs centerGroundPointX/centerGroundPointY de la section Format JSON pour Insights AI cognitiveservices.vision.spatialanalysis-persondistance. |
Exemple de sortie d’informations de placement de zone visualisées sur une image vidéo : 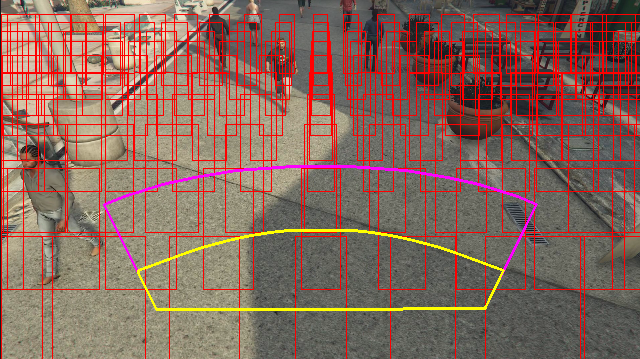
Les informations sur le placement des zones fournissent des suggestions pour vos configurations, mais il convient de suivre scrupuleusement les directives de Configuration de l’appareil photo pour obtenir les meilleurs résultats.
Paramètres du nœud du traqueur
Vous pouvez configurer le calcul de la vitesse par le biais des paramètres du nœud de suivi.
{
"enable_speed": true,
"remove_stationary_objects": true,
"stationary_objects_dist_threshold_in_pixels": 5,
"stationary_objects_buffer_length_in_seconds": 3600,
"stationary_objects_filter_ratio": 0.2
}
| Nom | Type | Description |
|---|---|---|
enable_speed |
bool | Indique si vous voulez calculer, ou non, la vitesse pour les personnes détectées. enable_speed est défini par défaut sur True. Il est fortement recommandé d’activer à la fois la vitesse et l’orientation pour obtenir les meilleures valeurs estimées. |
remove_stationary_objects |
bool | Indique si vous souhaitez supprimer les objets stationnaires. remove_stationary_objects est défini par défaut sur True. |
stationary_objects_dist_threshold_in_pixels |
int | Seuil de distance de voisinage pour décider si deux zones de détection peuvent être traitées comme une même détection. stationary_objects_dist_threshold_in_pixels est défini par défaut sur 5. |
stationary_objects_buffer_length_in_seconds |
int | Durée minimale (en secondes) pendant laquelle le système doit revenir en arrière pour décider si une cible est stationnaire ou non. stationary_objects_buffer_length_in_seconds est défini par défaut sur 3600. |
stationary_objects_filter_ratio |
float | Si une cible est détectée à plusieurs reprises au même emplacement (défini dans stationary_objects_dist_threshold_in_pixels) pendant une période supérieure au stationary_objects_filter_ratio (0,2 signifie 20 %) de l’intervalle de temps stationary_objects_buffer_length_in_seconds, elle est considérée comme une cible stationnaire. stationary_objects_filter_ratio est défini par défaut sur 0,2. |
Configuration et sortie des opérations d’analyse spatiale
Configuration de zone pour le nombre de personnes
Voici un exemple d’entrée JSON pour le paramètre SPACEANALYTICS_CONFIG qui configure une zone. Vous pouvez configurer plusieurs zones pour cette opération.
{
"zones": [
{
"name": "lobbycamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events": [
{
"type": "count",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
]
}
| Nom | Type | Description |
|---|---|---|
zones |
list | Liste de zones. |
name |
string | Nom convivial de cette zone. |
polygon |
list | Chaque paire de valeurs représente x et y pour les vertex d’un polygone. Le polygone représente les zones dans lesquelles les personnes sont suivies ou comptées. Les points du polygone sont basés sur des coordonnées normalisées (0-1), où l’angle supérieur gauche a les valeurs (0,0, 0,0) et l’angle inférieur droit a les valeurs (1,0, 1,0). |
threshold |
float | Les événements sont envoyés lorsque la personne dépasse ce nombre de pixels à l’intérieur de la zone. Il s’agit d’un champ facultatif dont la valeur est exprimée en ratio (0-1). Par exemple, la valeur 0,0253 sera de 13 pixels sur une vidéo dont la largeur d’image = 512 (0,0253 X 512 = ~13). |
type |
string | Pour cognitiveservices.vision.spatialanalysis-personcount, cela doit être count. |
trigger |
string | Type de déclencheur pour l’envoi d’un événement. Les valeurs prises en charge sont event pour l’envoi d’événements lorsque le nombre change ou interval pour envoyer des événements régulièrement, que le nombre ait changé ou non. |
output_frequency |
int | Vitesse à laquelle les événements sont émis. Lorsque output_frequency = X, un envoi est effectué tous les X événements, par ex. output_frequency = 2 signifie qu’un événement sur deux fait l’objet d’une sortie. La valeur output_frequency s’applique à la fois à event et à interval. |
focus |
string | Position du point dans le cadre englobant de la personne utilisé pour calculer les événements. La valeur de focus peut être footprint (l’encombrement de la personne), bottom_center (la partie centrale inférieure du cadre englobant de la personne) ou center (le centre du cadre englobant de la personne). |
Configuration de ligne pour personcrossingline
Voici un exemple d’entrée JSON pour le paramètre SPACEANALYTICS_CONFIG qui configure une ligne. Vous pouvez configurer plusieurs lignes de croisement pour cette opération.
{
"lines": [
{
"name": "doorcamera",
"line": {
"start": {
"x": 0,
"y": 0.5
},
"end": {
"x": 1,
"y": 0.5
}
},
"events": [
{
"type": "linecrossing",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
]
}
| Nom | Type | Description |
|---|---|---|
lines |
list | Liste de lignes. |
name |
string | Nom convivial de cette ligne. |
line |
list | Définition de la ligne. Il s’agit d’une ligne directionnelle qui vous permet de comprendre les « Enter » par rapport aux « Exit ». |
start |
Paire de valeurs | Coordonnées x, y pour le point de départ de la ligne. Les valeurs float représentent la position du vertex par rapport au coin supérieur gauche. Pour calculer les valeurs x, y absolues, vous multipliez ces valeurs par la taille de cadre. |
end |
Paire de valeurs | Coordonnées x, y pour le point de fin de la ligne. Les valeurs float représentent la position du vertex par rapport au coin supérieur gauche. Pour calculer les valeurs x, y absolues, vous multipliez ces valeurs par la taille de cadre. |
threshold |
float | Les événements sont envoyés lorsque la personne dépasse ce nombre de pixels à l’intérieur de la zone. Il s’agit d’un champ facultatif dont la valeur est exprimée en ratio (0-1). Par exemple, la valeur 0,0253 sera de 13 pixels sur une vidéo dont la largeur d’image = 512 (0,0253 X 512 = ~13). |
type |
string | Pour cognitiveservices.vision.spatialanalysis-personcrossingline, cela doit être linecrossing. |
trigger |
string | Type de déclencheur pour l’envoi d’un événement. Valeurs prises en charge : « event » : se déclenche quand quelqu’un traverse la ligne. |
focus |
string | Position du point dans le cadre englobant de la personne utilisé pour calculer les événements. La valeur de focus peut être footprint (l’encombrement de la personne), bottom_center (la partie centrale inférieure du cadre englobant de la personne) ou center (le centre du cadre englobant de la personne). La valeur par défaut est footprint. |
Configuration de zone pour personcrossingpolygon
Voici un exemple d’entrée JSON pour le paramètre SPACEANALYTICS_CONFIG qui configure une zone. Vous pouvez configurer plusieurs zones pour cette opération.
{
"zones":[
{
"name": "queuecamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "zonecrossing",
"config":{
"trigger": "event",
"focus": "footprint"
}
}]
},
{
"name": "queuecamera1",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "zonedwelltime",
"config":{
"trigger": "event",
"focus": "footprint"
}
}]
}]
}
| Nom | Type | Description |
|---|---|---|
zones |
list | Liste de zones. |
name |
string | Nom convivial de cette zone. |
polygon |
list | Chaque paire de valeurs représente x et y pour les vertex d’un polygone. Le polygone représente les zones dans lesquelles les personnes sont suivies ou comptées. Les valeurs float représentent la position du vertex par rapport au coin supérieur gauche. Pour calculer les valeurs x, y absolues, vous multipliez ces valeurs par la taille de cadre. |
target_side |
int | Spécifie un côté de la zone définie par polygon pour mesurer la durée pendant laquelle les utilisateurs sont tournés de ce côté pendant qu’ils se trouvent dans la zone. « dwellTimeForTargetSide » génère cette durée estimée. Chaque côté est un bord numéroté entre les deux sommets du polygone qui représente votre zone. Par exemple, le bord entre les deux premiers sommets du polygone représente le premier côté : 'side'=1. La valeur de target_side est comprise entre [0,N-1]N est le nombre de côtés de l’élément polygon. Ce champ est facultatif. |
threshold |
float | Les événements sont envoyés lorsque la personne dépasse ce nombre de pixels à l’intérieur de la zone. Il s’agit d’un champ facultatif dont la valeur est exprimée en ratio (0-1). Par exemple, la valeur 0,074 sera de 38 pixels sur une vidéo dont la largeur d’image = 512 (0,074 X 512 = ~38). |
type |
string | Pour cognitiveservices.vision.spatialanalysis-personcrossingpolygon, cela doit être zonecrossing ou zonedwelltime. |
trigger |
string | Type de déclencheur pour l’envoi d’un événement Valeurs prises en charge : « event » : se déclenche quand une personne entre ou quitte la zone. |
focus |
string | Position du point dans le cadre englobant de la personne utilisé pour calculer les événements. La valeur de focus peut être footprint (l’encombrement de la personne), bottom_center (la partie centrale inférieure du cadre englobant de la personne) ou center (le centre du cadre englobant de la personne). La valeur par défaut est footprint. |
Configuration de zone pour persondistance
Voici un exemple d’entrée JSON pour le paramètre SPACEANALYTICS_CONFIG qui configure une zone pour cognitiveservices.vision.spatialanalysis-persondistance. Vous pouvez configurer plusieurs zones pour cette opération.
{
"zones":[{
"name": "lobbycamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "persondistance",
"config":{
"trigger": "event",
"output_frequency":1,
"minimum_distance_threshold":6.0,
"maximum_distance_threshold":35.0,
"aggregation_method": "average",
"focus": "footprint"
}
}]
}]
}
| Nom | Type | Description |
|---|---|---|
zones |
list | Liste de zones. |
name |
string | Nom convivial de cette zone. |
polygon |
list | Chaque paire de valeurs représente x et y pour les vertex d’un polygone. Le polygone représente les zones dans lesquelles les utilisateurs sont comptés et la distance entre les personnes. Les valeurs float représentent la position du vertex par rapport au coin supérieur gauche. Pour calculer les valeurs x, y absolues, vous multipliez ces valeurs par la taille de cadre. |
threshold |
float | Les événements sont envoyés lorsque la personne dépasse ce nombre de pixels à l’intérieur de la zone. Il s’agit d’un champ facultatif dont la valeur est exprimée en ratio (0-1). Par exemple, la valeur 0,0253 sera de 13 pixels sur une vidéo dont la largeur d’image = 512 (0,0253 X 512 = ~13). |
type |
string | Pour cognitiveservices.vision.spatialanalysis-persondistance, cela doit être persondistance. |
trigger |
string | Type de déclencheur pour l’envoi d’un événement. Les valeurs prises en charge sont event pour l’envoi d’événements lorsque le nombre change ou interval pour envoyer des événements régulièrement, que le nombre ait changé ou non. |
output_frequency |
int | Vitesse à laquelle les événements sont émis. Lorsque output_frequency = X, un envoi est effectué tous les X événements, par ex. output_frequency = 2 signifie qu’un événement sur deux fait l’objet d’une sortie. La valeur output_frequency s’applique à la fois à event et à interval. |
minimum_distance_threshold |
float | Distance en pieds qui déclenchera un événement « TooClose » lorsque les personnes sont moins éloignées que cette distance. |
maximum_distance_threshold |
float | Distance en pieds qui déclenchera un événement « TooFar » lorsque les personnes sont plus éloignées que cette distance. |
aggregation_method |
string | La méthode pour le résultat persondistance agrégé. La méthode d’agrégation s’applique à la fois à mode et à average. |
focus |
string | Position du point dans le cadre englobant de la personne utilisé pour calculer les événements. La valeur de focus peut être footprint (l’encombrement de la personne), bottom_center (la partie centrale inférieure du cadre englobant de la personne) ou center (le centre du cadre englobant de la personne). |
Configuration de l’analyse spatiale
Voici un exemple d’entrée JSON pour le paramètre SPACEANALYTICS_CONFIG qui configure une ligne et une zone pour cognitiveservices.vision.spatialanalysis. Vous pouvez configurer plusieurs lignes/zones pour cette opération et chaque ligne/zone peut avoir des événements différents.
{
"lines": [
{
"name": "doorcamera",
"line": {
"start": {
"x": 0,
"y": 0.5
},
"end": {
"x": 1,
"y": 0.5
}
},
"events": [
{
"type": "linecrossing",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
],
"zones": [
{
"name": "lobbycamera",
"polygon": [[0.3, 0.3],[0.3, 0.9],[0.6, 0.9],[0.6, 0.3],[0.3, 0.3]],
"events": [
{
"type": "persondistance",
"config": {
"trigger": "event",
"output_frequency": 1,
"minimum_distance_threshold": 6.0,
"maximum_distance_threshold": 35.0,
"focus": "footprint"
}
},
{
"type": "count",
"config": {
"trigger": "event",
"output_frequency": 1,
"focus": "footprint"
}
},
{
"type": "zonecrossing",
"config": {
"focus": "footprint"
}
},
{
"type": "zonedwelltime",
"config": {
"focus": "footprint"
}
}
]
}
]
}
Configuration de la caméra
Pour en savoir plus sur la configuration des zones et des lignes, consultez les instructions de positionnement de la caméra.
Sortie de l’opération d’analyse spatiale
Les événements de chaque opération sont émis vers Azure IoT Hub au format JSON.
Format JSON pour le nombre de personnes AI Insights
Exemple de code JSON pour une sortie d’événement par cette opération.
{
"events": [
{
"id": "b013c2059577418caa826844223bb50b",
"type": "personCountEvent",
"detectionIds": [
"bc796b0fc2534bc59f13138af3dd7027",
"60add228e5274158897c135905b5a019"
],
"properties": {
"personCount": 2
},
"zone": "lobbycamera",
"trigger": "event"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:06:57.224Z",
"width": 608,
"height": 342,
"frameId": "1400",
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 10.306597709655762,
"focalLength": 385.3199462890625,
"tiltupAngle": 1.0969393253326416
},
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "bc796b0fc2534bc59f13138af3dd7027",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.612683747944079,
"y": 0.25340268765276636
},
{
"x": 0.7185954043739721,
"y": 0.6425260577285499
}
]
},
"confidence": 0.9559211134910583,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "0.0",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
},
{
"type": "person",
"id": "60add228e5274158897c135905b5a019",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.22326200886776573,
"y": 0.17830915618361087
},
{
"x": 0.34922296122500773,
"y": 0.6297955429344847
}
]
},
"confidence": 0.9389744400978088,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
| Nom de champ d'événement | Type | Description |
|---|---|---|
id |
string | ID de l’événement |
type |
string | Type d'événement |
detectionsId |
tableau | Tableau de taille 1 de l’identificateur unique de la détection de personne qui a déclenché cet événement |
properties |
collection | Collection de valeurs |
trackinId |
string | Identificateur unique de la personne détectée |
zone |
string | Le champ « name » du polygone qui représente la zone qui a été franchie |
trigger |
string | Le type de déclencheur est « event » ou « interval » en fonction de la valeur de trigger dans SPACEANALYTICS_CONFIG |
| Nom du champ de détection | Type | Description |
|---|---|---|
id |
string | ID de détection |
type |
string | Type de détection |
region |
collection | Collection de valeurs |
type |
string | Type de région |
points |
collection | Points supérieur gauche et inférieur droit lorsque le type de région est RECTANGLE |
confidence |
float | Confiance de l’algorithme |
attributes |
tableau | Tableau d’attributs. Chaque attribut se compose d’une étiquette, d’une tâche et d’un niveau de confiance |
label |
string | Valeur de l’attribut (par exemple, {label: face_mask} indique que la personne détectée porte un masque) |
confidence (attribute) |
float | Niveau de confiance de l’attribut avec une plage allant de 0 à 1 (par exemple, {confidence: 0.9, label: face_nomask} indique que la personne détectée ne porte pas de masque) |
task |
string | Classe ou tâche de classification de l’attribut |
| Nom du champ SourceInfo | Type | Description |
|---|---|---|
id |
string | ID de la caméra |
timestamp |
date | Date UTC à laquelle la charge utile JSON a été émise |
width |
int | Largeur de l’image vidéo |
height |
int | Hauteur de l’image vidéo |
frameId |
int | Identificateur du frame |
cameraCallibrationInfo |
collection | Collection de valeurs |
status |
string | État de l’étalonnage au format state[;progress description]. L’état peut être Calibrating, Recalibrating (si le réétalonnage est activé) ou Calibrated. La partie description de la progression est valide uniquement quand elle est dans l’état Calibrating et Recalibrating, qui est utilisé pour afficher la progression du processus d’étalonnage actuel. |
cameraHeight |
float | Hauteur de la caméra au-dessus du sol, en mètres. Cette valeur est déduite de l’étalonnage automatique. |
focalLength |
float | Longueur focale de la caméra, en pixels. Cette valeur est déduite de l’étalonnage automatique. |
tiltUpAngle |
float | Angle d’inclinaison de la caméra par rapport à la verticale. Cette valeur est déduite de l’étalonnage automatique. |
Format JSON pour personcrossingline AI Insights
Exemple de code JSON pour une sortie de détections par cette opération.
{
"events": [
{
"id": "3733eb36935e4d73800a9cf36185d5a2",
"type": "personLineEvent",
"detectionIds": [
"90d55bfc64c54bfd98226697ad8445ca"
],
"properties": {
"trackingId": "90d55bfc64c54bfd98226697ad8445ca",
"status": "CrossLeft"
},
"zone": "doorcamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:06:53.261Z",
"width": 608,
"height": 342,
"frameId": "1340",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "90d55bfc64c54bfd98226697ad8445ca",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.491627341822574,
"y": 0.2385801348769874
},
{
"x": 0.588894994635331,
"y": 0.6395559924387793
}
]
},
"confidence": 0.9005028605461121,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"trackingId": "90d55bfc64c54bfd98226697ad8445ca",
"speed": "1.2",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
| Nom de champ d'événement | Type | Description |
|---|---|---|
id |
string | ID de l’événement |
type |
string | Type d'événement |
detectionsId |
tableau | Tableau de taille 1 de l’identificateur unique de la détection de personne qui a déclenché cet événement |
properties |
collection | Collection de valeurs |
trackinId |
string | Identificateur unique de la personne détectée |
status |
string | Direction des traversées de lignes, 'CrossLeft' ou 'CrossRight'. La direction est exprimée comme si vous étiez placé au « début » faisant face à la « fin » de la ligne. CrossRight va de gauche à droite. CrossLeft va de droite à gauche. |
orientationDirection |
string | Direction d’orientation de la personne détectée après qu’elle a franchi la ligne. La valeur peut être « Left », « Right » ou « Straight ». Cette valeur est générée si enable_orientation a la valeur True dans CAMERACALIBRATOR_NODE_CONFIG |
zone |
string | Le champ « Name » de la ligne qui a été franchie |
| Nom du champ de détection | Type | Description |
|---|---|---|
id |
string | ID de détection |
type |
string | Type de détection |
region |
collection | Collection de valeurs |
type |
string | Type de région |
points |
collection | Points supérieur gauche et inférieur droit lorsque le type de région est RECTANGLE |
groundOrientationAngle |
float | Angle en radians dans le sens horaire de l’orientation de la personne sur le plan de sol déduit |
mappedImageOrientation |
float | L’angle projeté en radians dans le sens horaire de l’orientation de la personne sur l’espace de l’image 2D |
speed |
float | Vitesse estimée de la personne détectée. L’unité est foot per second (ft/s) |
confidence |
float | Confiance de l’algorithme |
attributes |
tableau | Tableau d’attributs. Chaque attribut se compose d’une étiquette, d’une tâche et d’un niveau de confiance |
label |
string | Valeur de l’attribut (par exemple, {label: face_mask} indique que la personne détectée porte un masque) |
confidence (attribute) |
float | Niveau de confiance de l’attribut avec une plage allant de 0 à 1 (par exemple, {confidence: 0.9, label: face_nomask} indique que la personne détectée ne porte pas de masque) |
task |
string | Classe ou tâche de classification de l’attribut |
| Nom du champ SourceInfo | Type | Description |
|---|---|---|
id |
string | ID de la caméra |
timestamp |
date | Date UTC à laquelle la charge utile JSON a été émise |
width |
int | Largeur de l’image vidéo |
height |
int | Hauteur de l’image vidéo |
frameId |
int | Identificateur du frame |
Important
Le modèle d’IA détecte une personne qu’elle soit orientée ou non vers la caméra. Le modèle IA n’exécute pas la reconnaissance des visages et n’émet aucune information biométrique.
Format JSON pour personcrossingpolygon AI Insights
Exemple de code JSON pour une sortie de détections par cette opération avec le type zonecrossing SPACEANALYTICS_CONFIG.
{
"events": [
{
"id": "f095d6fe8cfb4ffaa8c934882fb257a5",
"type": "personZoneEnterExitEvent",
"detectionIds": [
"afcc2e2a32a6480288e24381f9c5d00e"
],
"properties": {
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"status": "Enter",
"side": "1"
},
"zone": "queuecamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:15:09.680Z",
"width": 608,
"height": 342,
"frameId": "428",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "afcc2e2a32a6480288e24381f9c5d00e",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.8135572734631991,
"y": 0.6653949670624315
},
{
"x": 0.9937645761590255,
"y": 0.9925406829655519
}
]
},
"confidence": 0.6267998814582825,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"speed": "1.2",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
Exemple de code JSON pour une sortie de détections par cette opération avec le type zonedwelltime SPACEANALYTICS_CONFIG.
{
"events": [
{
"id": "f095d6fe8cfb4ffaa8c934882fb257a5",
"type": "personZoneDwellTimeEvent",
"detectionIds": [
"afcc2e2a32a6480288e24381f9c5d00e"
],
"properties": {
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"status": "Exit",
"side": "1",
"dwellTime": 7132.0,
"dwellFrames": 20
},
"zone": "queuecamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:15:09.680Z",
"width": 608,
"height": 342,
"frameId": "428",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "afcc2e2a32a6480288e24381f9c5d00e",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.8135572734631991,
"y": 0.6653949670624315
},
{
"x": 0.9937645761590255,
"y": 0.9925406829655519
}
]
},
"confidence": 0.6267998814582825,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.2",
"mappedImageOrientation": "0.3",
"speed": "1.2",
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
}
],
"schemaVersion": "2.0"
}
| Nom de champ d'événement | Type | Description |
|---|---|---|
id |
string | ID de l’événement |
type |
string | Type d'événement. La valeur peut être personZoneDwellTimeEvent ou personZoneEnterExitEvent. |
detectionsId |
tableau | Tableau de taille 1 de l’identificateur unique de la détection de personne qui a déclenché cet événement |
properties |
collection | Collection de valeurs |
trackinId |
string | Identificateur unique de la personne détectée |
status |
string | Direction des polygones croisés, « Enter » ou « Exit » |
side |
int | Numéro du côté du polygone traversé par la personne. Chaque côté est un bord numéroté entre les deux sommets du polygone qui représente votre zone. Le bord entre les deux premiers sommets du polygone représente le premier côté. Le « côté » est vide lorsque l’événement n’est pas associé à un côté spécifique en raison d’une occlusion. Par exemple, une sortie s’est produite quand une personne a disparu mais n’a pas été observée traversant un côté de la zone, ou une entrée s’est produite quand une personne est apparue dans la zone, mais n’a pas été observée traversant un côté. |
dwellTime |
float | Nombre de millisecondes qui représentent le temps passé par la personne dans la zone. Ce champ est fourni quand le type d’événement est personZoneDwellTimeEvent |
dwellFrames |
int | Nombre de frames que la personne a passées à la zone. Ce champ est fourni quand le type d’événement est personZoneDwellTimeEvent |
dwellTimeForTargetSide |
float | Nombre de millisecondes représentant le temps que la personne a passé dans la zone et pendant lequel elle était tournée du côté target_side. Ce champ est fourni quand enable_orientation a la valeur True dans CAMERACALIBRATOR_NODE_CONFIG et que la valeur de target_side est définie dans SPACEANALYTICS_CONFIG |
avgSpeed |
float | Vitesse moyenne de la personne dans la zone. L’unité est foot per second (ft/s) |
minSpeed |
float | Vitesse minimale de la personne dans la zone. L’unité est foot per second (ft/s) |
zone |
string | Le champ « name » du polygone qui représente la zone qui a été franchie |
| Nom du champ de détection | Type | Description |
|---|---|---|
id |
string | ID de détection |
type |
string | Type de détection |
region |
collection | Collection de valeurs |
type |
string | Type de région |
points |
collection | Points supérieur gauche et inférieur droit lorsque le type de région est RECTANGLE |
groundOrientationAngle |
float | Angle en radians dans le sens horaire de l’orientation de la personne sur le plan de sol déduit |
mappedImageOrientation |
float | L’angle projeté en radians dans le sens horaire de l’orientation de la personne sur l’espace de l’image 2D |
speed |
float | Vitesse estimée de la personne détectée. L’unité est foot per second (ft/s) |
confidence |
float | Confiance de l’algorithme |
attributes |
tableau | Tableau d’attributs. Chaque attribut se compose d’une étiquette, d’une tâche et d’un niveau de confiance |
label |
string | Valeur de l’attribut (par exemple, {label: face_mask} indique que la personne détectée porte un masque) |
confidence (attribute) |
float | Niveau de confiance de l’attribut avec une plage allant de 0 à 1 (par exemple, {confidence: 0.9, label: face_nomask} indique que la personne détectée ne porte pas de masque) |
task |
string | Classe ou tâche de classification de l’attribut |
Format JSON pour persondistance AI Insights
Exemple de code JSON pour une sortie de détections par cette opération.
{
"events": [
{
"id": "9c15619926ef417aa93c1faf00717d36",
"type": "personDistanceEvent",
"detectionIds": [
"9037c65fa3b74070869ee5110fcd23ca",
"7ad7f43fd1a64971ae1a30dbeeffc38a"
],
"properties": {
"personCount": 5,
"averageDistance": 20.807043981552123,
"minimumDistanceThreshold": 6.0,
"maximumDistanceThreshold": "Infinity",
"eventName": "TooClose",
"distanceViolationPersonCount": 2
},
"zone": "lobbycamera",
"trigger": "event"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:17:25.309Z",
"width": 608,
"height": 342,
"frameId": "1199",
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 12.9940824508667,
"focalLength": 401.2800598144531,
"tiltupAngle": 1.057669997215271
},
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "9037c65fa3b74070869ee5110fcd23ca",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.39988183975219727,
"y": 0.2719132942065858
},
{
"x": 0.5051516984638414,
"y": 0.6488402517218339
}
]
},
"confidence": 0.948630690574646,
"metadata": {
"centerGroundPointX": "-1.4638760089874268",
"centerGroundPointY": "18.29732322692871",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
},
{
"type": "person",
"id": "7ad7f43fd1a64971ae1a30dbeeffc38a",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.5200299714740954,
"y": 0.2875368218672903
},
{
"x": 0.6457497446160567,
"y": 0.6183311060855263
}
]
},
"confidence": 0.8235412240028381,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
}
],
"schemaVersion": "2.0"
}
| Nom de champ d'événement | Type | Description |
|---|---|---|
id |
string | ID de l’événement |
type |
string | Type d'événement |
detectionsId |
tableau | Tableau de taille 1 de l’identificateur unique de la détection de personne qui a déclenché cet événement |
properties |
collection | Collection de valeurs |
personCount |
int | Nombre de personnes détectées lors de l’émission de l’événement |
averageDistance |
float | Distance moyenne entre tous les individus détectés, en mètres |
minimumDistanceThreshold |
float | La distance en pieds qui déclenchera un événement « TooClose » lorsque les personnes sont moins éloignées que cette distance. |
maximumDistanceThreshold |
float | La distance en pieds qui déclenchera un événement « TooFar » lorsque les personnes sont plus éloignées que cette distance. |
eventName |
string | Le nom de l’événement est TooClose quand minimumDistanceThreshold est enfreint, TooFar quand maximumDistanceThreshold n’est pas enfreint ou unknown quand l’étalonnage automatique n’est pas terminé |
distanceViolationPersonCount |
int | Nombre de personnes détectées en violation de minimumDistanceThreshold ou maximumDistanceThreshold |
zone |
string | Le champ « name » du polygone qui représente la zone surveillée pour la distance entre personnes |
trigger |
string | Le type de déclencheur est « event » ou « interval » en fonction de la valeur de trigger dans SPACEANALYTICS_CONFIG |
| Nom du champ de détection | Type | Description |
|---|---|---|
id |
string | ID de détection |
type |
string | Type de détection |
region |
collection | Collection de valeurs |
type |
string | Type de région |
points |
collection | Points supérieur gauche et inférieur droit lorsque le type de région est RECTANGLE |
confidence |
float | Confiance de l’algorithme |
centerGroundPointX/centerGroundPointY |
2 valeurs float | Valeurs x, y avec les coordonnées de l’emplacement déduit de la personne sur le sol, en mètres. x et y sont des coordonnées sur le plan de sol, en supposant que le sol est plat. La position de la caméra est l’origine. |
Dans centerGroundPoint, x est le composant de la distance entre la caméra et la personne qui est perpendiculaire au plan d’image de la caméra. y est le composant de la distance qui est parallèle au plan d’image de la caméra.
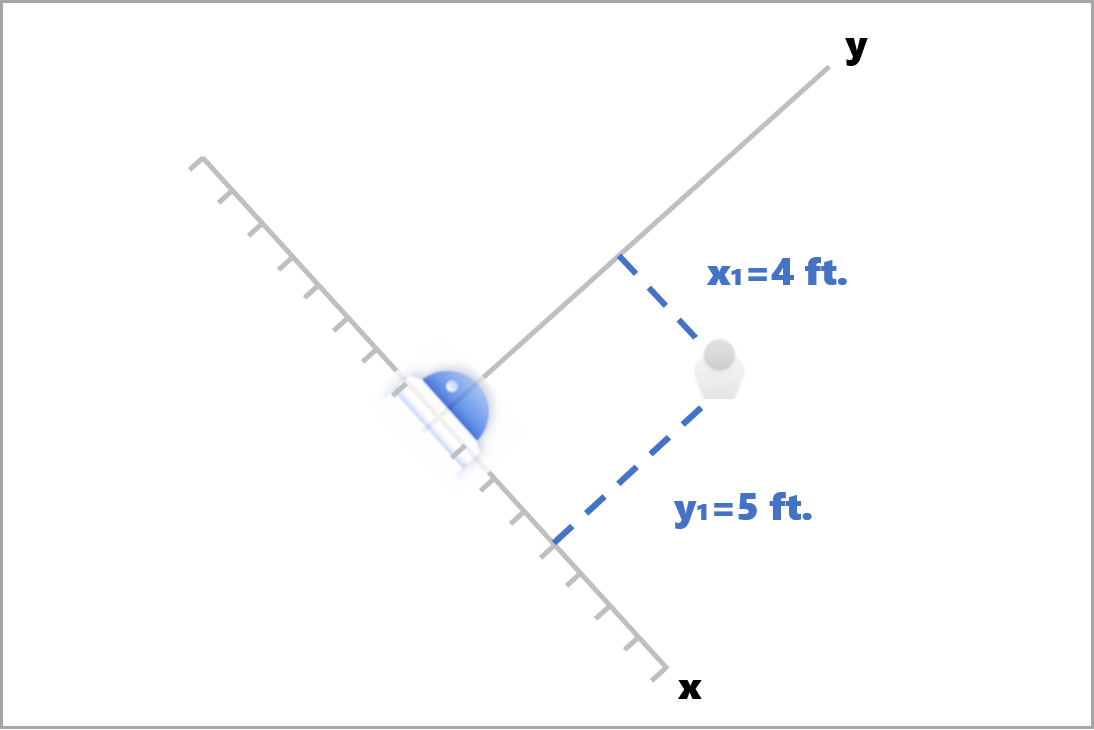
Dans cet exemple, centerGroundPoint est {centerGroundPointX: 4, centerGroundPointY: 5}. Cela signifie qu’il y a une personne située à 4 pieds (1,2 mètre) de la caméra et à 5 pieds (1,5 mètre) vers la droite, en regardant la salle du dessus.
| Nom du champ SourceInfo | Type | Description |
|---|---|---|
id |
string | ID de la caméra |
timestamp |
date | Date UTC à laquelle la charge utile JSON a été émise |
width |
int | Largeur de l’image vidéo |
height |
int | Hauteur de l’image vidéo |
frameId |
int | Identificateur du frame |
cameraCallibrationInfo |
collection | Collection de valeurs |
status |
string | État de l’étalonnage au format state[;progress description]. L’état peut être Calibrating, Recalibrating (si le réétalonnage est activé) ou Calibrated. La partie description de la progression est valide uniquement quand elle est dans l’état Calibrating et Recalibrating, qui est utilisé pour afficher la progression du processus d’étalonnage actuel. |
cameraHeight |
float | Hauteur de la caméra au-dessus du sol, en mètres. Cette valeur est déduite de l’étalonnage automatique. |
focalLength |
float | Longueur focale de la caméra, en pixels. Cette valeur est déduite de l’étalonnage automatique. |
tiltUpAngle |
float | Angle d’inclinaison de la caméra par rapport à la verticale. Cette valeur est déduite de l’étalonnage automatique. |
Format JSON pour spatialanalysis AI Insights
La sortie de cette opération dépend du paramètre events configuré. Par exemple, s’il existe un événement zonecrossing configuré pour cette opération, la sortie sera identique à cognitiveservices.vision.spatialanalysis-personcrossingpolygon.
Utiliser la sortie générée par le conteneur
Vous pouvez intégrer la détection ou les événements d’analyse spatiale dans votre application. Voici quelques approches à envisager :
- Utilisez le SDK Azure Event Hubs pour le langage de programmation que vous avez choisi afin de vous connecter au point de terminaison Azure IoT Hub et de recevoir les événements. Pour plus d’informations, consultez Lire des messages appareil-à-cloud à partir du point de terminaison intégré.
- Configurez le routage des messages sur votre instance IoT Hub Azure pour envoyer les événements à d’autres points de terminaison ou enregistrer les événements dans votre stockage de données. Pour plus d’informations, consultez Routage des messages IoT Hub.
- Configurez un travail Azure Stream Analytics pour traiter les événements en temps réel à mesure qu’ils arrivent, et pour créer des visualisations.
Déployer des opérations d’analyse spatiale à grande échelle (plusieurs caméras)
Pour optimiser les performances et l’utilisation des GPU, vous pouvez déployer toutes les opérations d’analyse spatiale sur plusieurs caméras à l’aide d’instances de graphe. Vous trouverez ci-dessous un exemple de configuration pour l’exécution de l’opération cognitiveservices.vision.spatialanalysis-personcrossingline sur 15 caméras.
"properties.desired": {
"globalSettings": {
"PlatformTelemetryEnabled": false,
"CustomerTelemetryEnabled": true
},
"graphs": {
"personzonelinecrossing": {
"operationId": "cognitiveservices.vision.spatialanalysis-personcrossingline",
"version": 1,
"enabled": true,
"sharedNodes": {
"shared_detector0": {
"node": "PersonCrossingLineGraph.detector",
"parameters": {
"DETECTOR_NODE_CONFIG": "{ \"gpu_index\": 0, \"batch_size\": 7, \"do_calibration\": true}",
}
},
"shared_calibrator0": {
"node": "PersonCrossingLineGraph/cameracalibrator",
"parameters": {
"CAMERACALIBRATOR_NODE_CONFIG": "{ \"gpu_index\": 0, \"do_calibration\": true, \"enable_zone_placement\": true}",
"CALIBRATION_CONFIG": "{\"enable_recalibration\": true, \"quality_check_frequency_seconds\": 86400}",
}
},
"parameters": {
"VIDEO_DECODE_GPU_INDEX": 0,
"VIDEO_IS_LIVE": true
},
"instances": {
"1": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 1>",
"VIDEO_SOURCE_ID": "camera 1",
"SPACEANALYTICS_CONFIG": "{\"zones\":[{\"name\":\"queue\",\"polygon\":[[0,0],[1,0],[0,1],[1,1],[0,0]]}]}"
}
},
"2": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 2>",
"VIDEO_SOURCE_ID": "camera 2",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"3": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 3>",
"VIDEO_SOURCE_ID": "camera 3",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"4": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 4>",
"VIDEO_SOURCE_ID": "camera 4",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"5": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 5>",
"VIDEO_SOURCE_ID": "camera 5",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"6": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 6>",
"VIDEO_SOURCE_ID": "camera 6",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"7": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 7>",
"VIDEO_SOURCE_ID": "camera 7",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"8": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 8>",
"VIDEO_SOURCE_ID": "camera 8",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"9": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 9>",
"VIDEO_SOURCE_ID": "camera 9",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"10": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 10>",
"VIDEO_SOURCE_ID": "camera 10",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"11": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 11>",
"VIDEO_SOURCE_ID": "camera 11",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"12": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 12>",
"VIDEO_SOURCE_ID": "camera 12",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"13": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 13>",
"VIDEO_SOURCE_ID": "camera 13",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"14": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 14>",
"VIDEO_SOURCE_ID": "camera 14",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"15": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 15>",
"VIDEO_SOURCE_ID": "camera 15",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
}
}
},
}
}
| Nom | Type | Description |
|---|---|---|
batch_size |
int | Si toutes les caméras ont la même résolution, définissez batch_size sur le nombre de caméras qui seront utilisées dans cette opération ; sinon, attribuez la valeur 1 à batch_size ou laissez la valeur par défaut (1), ce qui indique qu’aucun lot n’est pris en charge. |