Remarque
L’accès à cette page nécessite une autorisation. Vous pouvez essayer de vous connecter ou de modifier des répertoires.
L’accès à cette page nécessite une autorisation. Vous pouvez essayer de modifier des répertoires.
Les broches d’E/S à usage général (GPIO) peuvent être configurées pour recevoir des signaux électriques comme entrée. Au niveau le plus simple, cela est utile pour les scénarios qui détectent l’ouverture/fermeture d’un circuit. Ces circuits peuvent inclure des boutons-poussoirs, des interrupteurs à bascule, des interrupteurs à lames, des interrupteurs de pression et d'autres appareils qui représentent des valeurs binaires (activées/désactivées) en complétant un circuit.
Dans ce tutoriel, vous allez utiliser .NET et les broches GPIO de Raspberry Pi pour détecter l'ouverture et la fermeture d'un circuit.
Prerequisites
- Ordinateur monocarte basé sur ARM (ARMv7 ou supérieur) (SBC)
- Fils de jumper
- Plaque d'essai (facultatif)
- Plaque d'extension GPIO Raspberry Pi (facultatif)
- .NET SDK 10 ou version ultérieure
Note
Ce tutoriel est écrit en supposant que l’appareil cible est Raspberry Pi. Toutefois, ce tutoriel peut être utilisé pour n’importe quel SBC linux qui prend en charge .NET, comme Orange Pi, ODROID, etc.
Vérifiez que SSH est activé sur votre appareil. Pour Raspberry Pi, reportez-vous à la configuration d’un serveur SSH dans la documentation Raspberry Pi.
Préparer le matériel
Utilisez les composants matériels pour générer le circuit comme illustré dans le diagramme suivant :

L’image ci-dessus illustre une connexion directe entre une broche au sol et une broche 21.
Conseil / Astuce
Le diagramme représente une plaque d'essai et un breakout GPIO à des fins d’illustration, mais n’hésitez pas à connecter simplement une broche de masse et la broche 21 avec un fil de liaison sur le Raspberry Pi.
Reportez-vous au schéma de brochage suivant si nécessaire.

Image courtesy Raspberry Pi Foundation.
Créer l’application
Effectuez les étapes suivantes dans votre environnement de développement préféré :
Créez une nouvelle application console .NET à l’aide de la CLI .NET ou de Visual Studio. Nommez-le InputTutorial.
dotnet new console -o InputTutorial cd InputTutorialAjoutez le package System.Device.Gpio au projet. Utilisez .NET CLI à partir du répertoire du projet ou Visual Studio.
dotnet package add System.Device.Gpio --version 4.0.1Remplacez le contenu du fichier Program.cs par le code suivant :
using System.Device.Gpio; using System.Threading.Tasks; const int Pin = 21; const string Alert = "ALERT 🚨"; const string Ready = "READY ✅"; using var controller = new GpioController(); controller.OpenPin(Pin, PinMode.InputPullUp); Console.WriteLine( $"Initial status ({DateTime.Now}): {(controller.Read(Pin) == PinValue.High ? Alert : Ready)}"); controller.RegisterCallbackForPinValueChangedEvent( Pin, PinEventTypes.Falling | PinEventTypes.Rising, OnPinEvent); await Task.Delay(Timeout.Infinite); static void OnPinEvent(object sender, PinValueChangedEventArgs args) { Console.WriteLine( $"({DateTime.Now}) {(args.ChangeType is PinEventTypes.Rising ? Alert : Ready)}"); }Dans le code précédent :
- Une déclaration using crée une instance de
GpioController. Lausingdéclaration garantit que l’objet est supprimé et que les ressources matérielles sont correctement libérées.-
GpioControllerest instancié sans paramètres, indiquant qu’il doit détecter la plateforme matérielle sur laquelle il s’exécute et utiliser le schéma de numérotation de broche logique.
-
- La broche GPIO 21 est ouverte avec
PinMode.InputPullUp.- Cela ouvre la broche avec une résistance PullUp engagée. Dans ce mode, lorsque la broche est connectée au sol, elle retourne
PinValue.Low. Lorsque la broche est déconnectée du sol et que le circuit est ouvert, la broche retournePinValue.High.
- Cela ouvre la broche avec une résistance PullUp engagée. Dans ce mode, lorsque la broche est connectée au sol, elle retourne
- L’état initial est écrit dans une console à l’aide d’une expression ternaire. L’état actuel de la broche se lit avec
Read(). Si c’estPinValue.High, il écrit laAlertchaîne dans la console. Sinon, il écrit la chaîne de caractèresReady. -
RegisterCallbackForPinValueChangedEvent()inscrit une fonction de rappel pour les événementsPinEventTypes.RisingetPinEventTypes.Fallingsur le pin. Ces événements correspondent respectivement aux états des brochesPinValue.HighetPinValue.Low. - La fonction de rappel pointe vers une méthode appelée
OnPinEvent().OnPinEvent()utilise une autre expression ternaire qui écrit également les chaînes correspondantesAlertReady. - Le thread principal est en veille indéfiniment en attendant les événements de broche.
- Une déclaration using crée une instance de
Générez l'application. Si vous utilisez l’interface CLI .NET, exécutez
dotnet build. Pour générer dans Visual Studio, appuyez sur Ctrl+Shift+B.Déployez l’application sur le SBC en tant qu’application autonome. Pour obtenir des instructions, consultez Déployer des applications .NET sur Raspberry Pi. Veillez à accorder à l’exécutable l’autorisation d’exécution à l’aide de
chmod +x.Exécutez l’application sur Raspberry Pi en basculant vers le répertoire de déploiement et en exécutant l’exécutable.
./InputTutorialLa console affiche du texte similaire à ce qui suit :
Initial status (05/10/2022 15:59:25): READY ✅Déconnectez la broche 21 du sol. La console affiche du texte similaire à ce qui suit :
(05/10/2022 15:59:59) ALERT 🚨Reconnectez la broche 21 et la terre. La console affiche du texte similaire à ce qui suit :
(05/10/2022 16:00:25) READY ✅Terminez le programme en appuyant sur Ctrl+C.
Félicitations ! Vous avez utilisé GPIO pour détecter les entrées à l’aide du System.Device.Gpio package NuGet ! Il existe de nombreuses utilisations pour ce type d’entrée. Cet exemple peut être utilisé avec n’importe quel scénario où un commutateur se connecte ou interrompt un circuit. Voici un exemple qui l’utilise avec un commutateur magnétique, qui est souvent utilisé pour détecter les portes ouvertes ou les fenêtres.
Fils-piège laser
En étendant le concept d’exemple précédent un peu plus loin, examinons comment cela pourrait être appliqué à la création d’un tripwire laser. La création d’un tripwire laser nécessite les composants supplémentaires suivants :
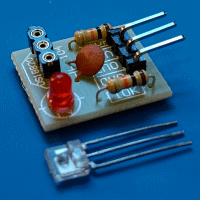
- Module émetteur laser KY-008
- Module de capteur de récepteur laser (voir la remarque ci-dessous)
- 2 résistances de 10 kΩ
Note
Le module de capteur de récepteur laser est le nom générique appliqué à un module commun trouvé chez de nombreux détaillants Internet. L’appareil peut varier en nom ou fabricant, mais doit ressembler à cette image.
Connecter le matériel tripwire laser
Connectez les composants comme indiqué dans le diagramme suivant.

Faites attention aux résistances de 10 000 Ω. Ceux-ci implémentent un diviseur de tension. Cela est dû au fait que le module récepteur laser génère 5V pour indiquer que le faisceau est rompu. Raspberry Pi prend uniquement en charge jusqu’à 3,3V pour l’entrée GPIO. Étant donné que l'envoi du 5V complet à la broche risque d'endommager le Raspberry Pi, le courant du module récepteur passe par un diviseur de tension pour réduire de moitié la tension à 2,5V.
Appliquer des mises à jour de code source
Vous pouvez presque utiliser le même code que précédemment , à une exception près. Dans les autres exemples, nous avons utilisé PinMode.InputPullUp de sorte que lorsque la broche est déconnectée du sol et que le circuit est ouvert, la broche retourne PinValue.High.
Toutefois, dans le cas du module récepteur laser, nous ne détectons pas un circuit ouvert. Au lieu de cela, nous voulons que la broche agisse comme un récepteur pour le courant provenant du module récepteur laser. Dans ce cas, nous allons ouvrir la broche avec PinMode.InputPullDown. De cette façon, la broche retourne PinValue.Low quand elle n’obtient pas de courant et PinValue.High quand elle reçoit le courant du module récepteur laser.
controller.OpenPin(pin, PinMode.InputPullDown);
Important
Assurez-vous que le code déployé sur votre Raspberry Pi inclut cette modification avant de tester un tripwire laser. Le programme fonctionne sans cela, mais l’utilisation du mode d’entrée incorrect risque de endommager votre Raspberry Pi !

Obtenir le code source
La source de ce didacticiel est available sur GitHub.
Prochaines étapes
Collaborer avec nous sur GitHub
La source de ce contenu se trouve sur GitHub, où vous pouvez également créer et examiner les problèmes et les demandes de tirage. Pour plus d’informations, consultez notre guide du contributeur.