Sistemi di coordinate di Azure Kinect DK
In questo articolo vengono descritte le convenzioni usate per i sistemi di coordinate 2D e 3D. Esistono sistemi di coordinate separati associati al dispositivo di ogni sensore e le funzioni di calibrazione consentono di trasformare i punti tra di essi. Le funzioni di trasformazione trasformano intere immagini tra i sistemi di coordinate.
Sistemi di coordinate 2D
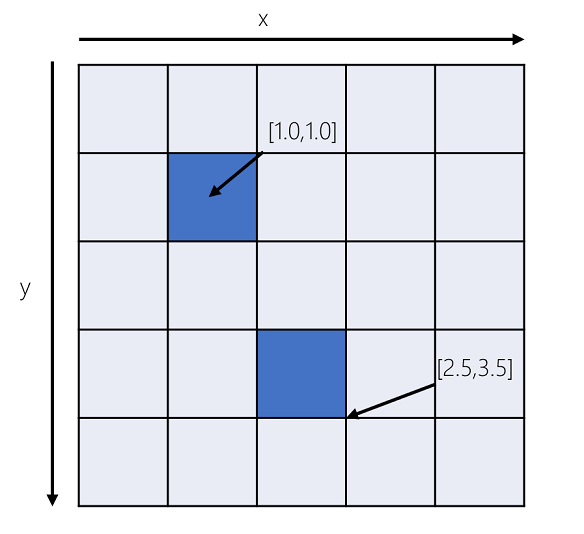
La fotocamere di profondità e la fotocamera a colori sono associate a un sistema di coordinate 2D indipendente. Una coppia di coordinate [x,y] è rappresentata in unità di pixel dove x varia da 0 a larghezza -1 e y da 0 a altezza -1. La larghezza e l'altezza dipendono dalla modalità in cui si è scelto di gestire la fotocamera di profondità e quella a colori. La coordinata pixel [0,0] corrisponde al pixel in alto a sinistra dell'immagine. Le coordinate pixel possono essere frazioni che rappresentano le coordinate subpixel.
Il sistema di coordinate 2D è centrato su 0, ovvero la coordinata [0.0, 0.0] subpixel rappresenta il centro e [0.5,0.5] l'angolo inferiore destro del pixel, come illustrato di seguito.
Sistemi di coordinate 3D
Ogni fotocamera, l'accelerometro e il giroscopio, sono associati a un sistema di coordinate 3D spaziale e indipendente.
I punti nei sistemi di coordinate 3D sono rappresentati come triplette di coordinate [X,Y,Z] con unità in millimetri.
Fotocamera di profondità e a colori
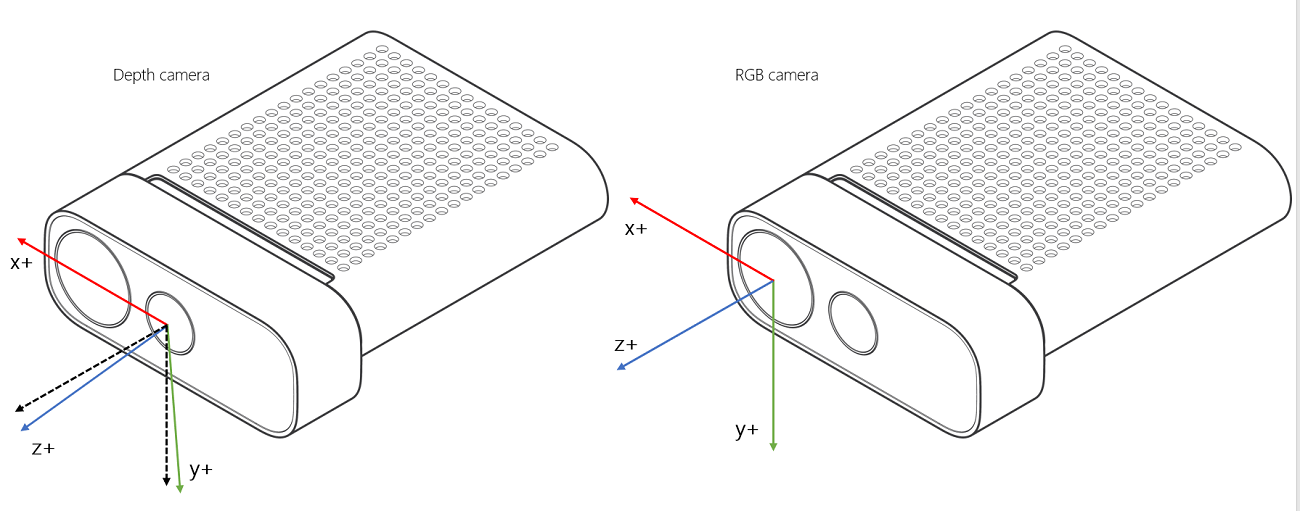
L'origine [0,0,0] si trova nel punto focale della fotocamera. Il sistema di coordinate è orientato in modo che il verso positivo dell'asse x punti a destra, il verso positivo dell'asse y punti in basso e il verso positivo dell'asse z punti in avanti.
La fotocamera di profondità è inclinata di 6 gradi verso il basso rispetto alla fotocamera a colori, come illustrato di seguito.
La fotocamera di profondità usa due illuminatori. L'illuminatore usato nelle modalità NFOV (campo visivo stretto) è allineato al case della fotocamera di profondità, quindi l'illuminatore non è inclinato. L'illuminatore usato nelle modalità WFOV (campo visivo largo) è inclinato di ulteriori 1,3 gradi verso il basso rispetto alla fotocamera di profondità.
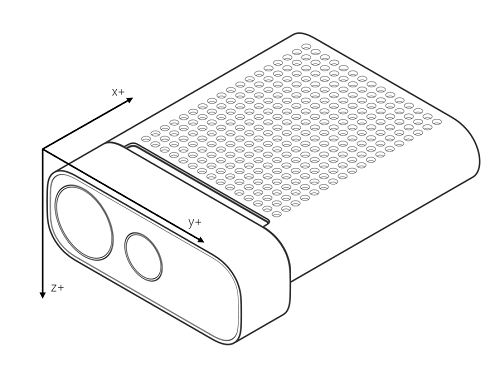
Giroscopio e accelerometro
L'origine del giroscopio [0,0,0] è identica all'origine della fotocamera di profondità. L'origine dell'accelerometro coincide con la sua posizione fisica. Sia il sistema di coordinate dell’accelerometro che quello del giroscopio si trovano a destra. In questo sistema di coordinate il verso positivo dell'asse x punta all’indietro, il verso positivo dell'asse y punta a sinistra e il verso positivo dell'asse z punta verso il basso, come illustrato di seguito.