Specifiche hardware di Azure Kinect DK
Questo articolo contiene informazioni sull'integrazione dell'hardware di Azure Kinect e la tecnologia dei sensori più recente di Microsoft in un singolo accessorio connesso tramite USB.
Terms
Nell'articolo vengono usate le abbreviazioni seguenti.
- NFOV (Narrow field-of-view depth mode, modalità di profondità campo visivo stretto)
- WFOV (Wide field-of-view depth mode, modalità di profondità campo visivo largo)
- FOV (Field-of-view, campo visivo)
- FPS (Frames-per-second, fotogrammi al secondo)
- IMU (Inertial Measurement Unit, unità di misura inerziale)
- FoI (Field of Interest, campo di interesse)
Dimensioni e peso del prodotto
Ecco le dimensioni e il peso del dispositivo Azure Kinect.
- Dimensioni: 103 x 39 x 126 mm
- Peso: 440 g

Un file STEP per il dispositivo Azure Kinect è disponibile qui.
ambiente operativo
Azure Kinect DK è destinato a sviluppatori e attività commerciali che operano nelle condizioni ambientali seguenti:
- Temperatura: 10-25 0C
- Umidità: 8-90% di umidità relativa (senza condensa)
Nota
L'uso del dispositivo in condizioni ambientali diverse potrebbe causare malfunzionamenti e/o errori. Queste condizioni sono applicabili all'ambiente immediatamente circostante il dispositivo in tutte le condizioni operative. Per l'uso con enclosure esterne, è consigliabile adottare soluzioni per il controllo della temperatura attiva e/o altre soluzioni di raffreddamento, per assicurarsi che il dispositivo venga mantenuto all'interno di questi intervalli. L'architettura del dispositivo prevede un canale di raffreddamento tra la sezione anteriore e il manicotto posteriore. Quando si implementa il dispositivo, assicurarsi che tale canale di raffreddamento non sia ostruito.
Vedere altre informazioni sulla sicurezza del prodotto.
Modalità operative supportate dalla fotocamera di profondità
Azure Kinect DK integra una fotocamera di profondità ToF (Time-of-Flight) da 1 Megapixel progettata da Microsoft con il sensore di immagini presentato alI'SSCC 2018. La fotocamera di profondità supporta le modalità indicate di seguito:
| Modalità | Risoluzione | FoI | FPS | Intervallo operativo* | Tempo di esposizione |
|---|---|---|---|---|---|
| NFOV senza binning | 640x576 | 75°x65° | 0, 5, 15, 30 | 0,5 - 3,86 m | 12,8 ms |
| NFOV 2x2 con binning (SW) | 320x288 | 75°x65° | 0, 5, 15, 30 | 0,5 - 5,46 m | 12,8 ms |
| WFOV 2x2 con binning | 512x512 | 120°x120° | 0, 5, 15, 30 | 0,25 - 2,88 m | 12,8 ms |
| WFOV senza binning | 1024x1024 | 120°x120° | 0, 5, 15 | 0,25 - 2,21 m | 20,3 ms |
| IR passivo | 1024x1024 | N/D | 0, 5, 15, 30 | N/D | 1,6 ms |
*Riflettanza dal 15% al 95% a 850nm, 2,2 μW/cm2/nm, errore casuale e deviazione standard ≤ 17 mm, errore sistematico tipico < 11 mm + 0,1% di distanza senza interferenze multi-percorso. La profondità può essere specificata al di fuori dell'intervallo operativo indicato in precedenza. Dipende dalla riflettività di un oggetto.
Modalità operative supportate dalla fotocamera a colori
Azure Kinect DK include un sensore CMOS di 12 MP OV12A10 rolling shutter. Le modalità operative native sono indicate di seguito:
| Risoluzione fotocamera RGB (OxV) | Proporzioni | Opzioni di formattazione | Frequenza dei fotogrammi (FPS) | FOV nominale (OxV)(post-elaborazione) |
|---|---|---|---|---|
| 3840x2160 | 16:9 | MJPEG | 0, 5, 15, 30 | 90°x59° |
| 2560x1440 | 16:9 | MJPEG | 0, 5, 15, 30 | 90°x59° |
| 1920x1080 | 16:9 | MJPEG | 0, 5, 15, 30 | 90°x59° |
| 1280x720 | 16:9 | MJPEG/YUY2/NV12 | 0, 5, 15, 30 | 90°x59° |
| 4096x3072 | 4:3 | MJPEG | 0, 5, 15 | 90°x74.3° |
| 2048x1536 | 4:3 | MJPEG | 0, 5, 15, 30 | 90°x74.3° |
La fotocamera RGB è compatibile a livello di classe con video USB e può essere usata senza Sensor SDK. Spazio colore della fotocamera RGB: gamma completa BT.601 [0..255]. Il sottocampionamento della crominanza MJPEG è 4:2:2.
Nota
Sensor SDK può fornire immagini a colori in formato pixel BGRA. Non è una modalità nativa supportata dal dispositivo e se usata genera un carico aggiuntivo sulla CPU. La CPU host viene usata per la conversione dalle immagini MJPEG ricevute dal dispositivo.
Valori del tempo di esposizione della fotocamera RGB
Di seguito è riportato il mapping dei valori di esposizione manuale accettabili per la fotocamera RGB:
| exp | 2^exp | 50 Hz | 60 Hz |
|---|---|---|---|
| -11 | 488 | 500 | 500 |
| -10 | 977 | 1250 | 1250 |
| -9 | 1953 | 2500 | 2500 |
| -8 | 3906 | 10000 | 8330 |
| -7 | 7813 | 20000 | 16670 |
| -6 | 15625 | 30000 | 33330 |
| -5 | 31250 | 40000 | 41670 |
| -4 | 62500 | 50000 | 50000 |
| -3 | 125000 | 60000 | 66670 |
| -2 | 250000 | 80000 | 83330 |
| -1 | 500.000 | 100000 | 100000 |
| 0 | 1000000 | 120000 | 116670 |
| 1 | 2000000 | 130000 | 133330 |
Intervalli di base del sensore di profondità
| Modalità di profondità | IR IR |
Durata Larghezza |
Idle Periodi |
Tempo inattività | Tempo Ora |
|---|---|---|---|---|---|
| NFOV senza binning NFOV 2xx con binning WFOV 2x2 con binning |
9 | 125 us | 8 | 1450 us | 12,8 ms |
| WFOV senza binning | 9 | 125 us | 8 | 2390 us | 20,3 ms |
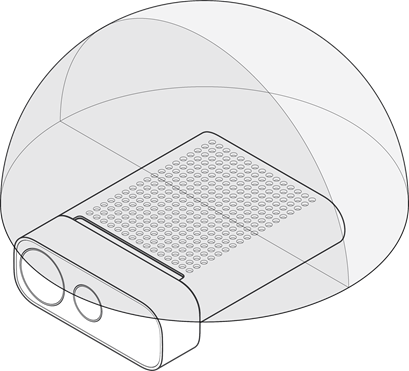
Campo visivo della fotocamera
L'immagine seguente mostra la profondità del campo visivo della fotocamera RGB, ovvero le angolazioni che i sensori "vedono". Questo diagramma mostra la fotocamera RGB in modalità 4:3.

Questa immagine mostra il campo visivo della fotocamera visto di fronte a una distanza di 2000 mm.

Nota
Quando la profondità è in modalità NFOV, la fotocamera RGP presenta una sovrapposizione dei pixel migliore nelle risoluzioni a 4:3 rispetto a 16:9 .
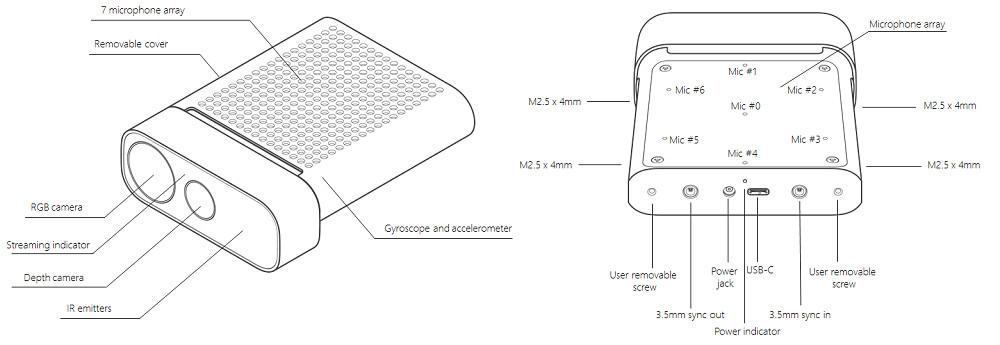
Sensore di movimento (IMU)
L'unità di misurazione inerziale (IMU) incorporata è LSM6DSMUS e include sia un accelerometro che un giroscopio. L'accelerometro e il giroscopio vengono campionati simultaneamente a 1,6 kHz. I campioni vengono riportati all'host a 208 Hz.
Array di microfoni
Azure Kinect DK incorpora un array circolare di sette microfoni di alta qualità che viene identificato come dispositivo audio USB di classe 2.0. Tutti e 7 i canali sono accessibili. Le specifiche di prestazioni sono:
- Sensibilità: -22 dBFS (94 dB SPL, 1 kHz)
- Rapporto segnale/rumore > 65 dB
- Punto di sovraccarico acustico: 116 dB
USB
Azure Kinect DK è un dispositivo composito USB3 che espone gli endpoint hardware seguenti al sistema operativo:
L'ID fornitore è 0x045E (Microsoft). La tabella ID prodotto è illustrata di seguito:
| Interfaccia USB | PNP IP | Note |
|---|---|---|
| Hub USB3.1 Gen2 | 0x097A | Hub principale |
| Hub USB2.0 | 0x097B | USB HS |
| Fotocamera di profondità | 0x097C | USB 3.0 |
| Fotocamera a colori | 0x097D | USB 3.0 |
| Microfoni | 0x097E | USB HS |
Indicatori
Il dispositivo include un indicatore di streaming della fotocamera nella parte anteriore che è possibile disabilitare a livello di codice tramite Sensor SDK.
Il LED di stato dietro il dispositivo indica lo stato:
| Se la luce è | Significa |
|---|---|
| Bianca continua | Il dispositivo è acceso e funziona correttamente. |
| Bianca lampeggiante | Il dispositivo è acceso ma non ha una connessione dati USB 3.0. |
| Gialla lampeggiante | L'alimentazione del dispositivo non è sufficiente per il funzionamento. |
| Gialla, quindi bianca lampeggiante | Aggiornamento o ripristino del firmware in corso |
Alimentazione del dispositivo
Il dispositivo può essere alimentato in due modi:
- Tramite l'alimentatore incluso. Il connettore di alimentazione ha un diametro esterno di 4,5 mm con un diametro interno di 3,0 mm e un diametro del pin di 0,6 mm.
- Tramite un cavo da tipo C a tipo C per alimentazione e dati.
Il cavo da tipo C a tipo C non è incluso nel dispositivo Azure Kinect DK.
Nota
- Il cavo dell'alimentatore incluso è USB da tipo A a un singolo connettore a cilindro posteriore. Usare l'alimentatore a rete fornito con questo cavo. Il dispositivo è in grado di assorbire una potenza maggiore di quella che possono fornire due porte USB standard di tipo A.
- I cavi USB sono importante, quindi è consigliabile usare cavi di alta qualità e di verificarne in funzionamento prima di distribuire l'unità in remoto.
Suggerimento
Per selezionare un cavo da tipo C a tipo C valido:
- Il cavo certificato USB deve supportare sia l'alimentazione che i dati.
- Un cavo passivo deve essere di lunghezza inferiore a 1,5 m. Per lunghezze maggiori, usare un cavo attivo.
- Il cavo deve supportare almeno 1,5 A. In caso contrario, è necessario connettere un alimentatore esterno.
Verificare il cavo:
Connettere il dispositivo al PC host tramite il cavo.
Verificare che tutti i dispositivi vengano enumerati correttamente in Gestione dispositivi di Windows. Le fotocamere di profondità e RGB dovrebbero comparire come illustrato nell'esempio seguente.

Verificare che il cavo sia in grado di trasmettere in modo affidabile in tutti i sensori nel visualizzatore di Azure Kinect, con le impostazioni seguenti:
- Fotocamera di profondità: NFOV senza binning
- Fotocamera RGB: 2160p
- Microfoni e dispositivi abilitati IMU
Cosa significa la luce?
L'indicatore di alimentazione è un LED posto sul retro del dispositivo Azure Kinect DK. Il colore del LED cambia in base allo stato del dispositivo.

Le etichette della figura fanno riferimento ai componenti seguenti:
- Indicatore di alimentazione
- Cavo di alimentazione, connesso alla fonte di energia
- Cavo dati USB-C, connesso al PC
Assicurarsi che i cavi siano connessi come illustrato. Quindi consultare la tabella seguente per informazioni sui vari stati indicati dal LED di alimentazione.
| Se la luce è: | Significa che: | Ed è necessario |
|---|---|---|
| Bianca continua | Il dispositivo è alimentato e funziona correttamente. | Usare il dispositivo. |
| Spenta | Il dispositivo non è connesso al PC. | Assicurarsi che il cavo di alimentazione con il connettore cilindrico sia connesso al dispositivo e all'alimentatore USB. Assicurarsi che il cavo USB-C sia connesso al dispositivo e al PC. |
| Bianca lampeggiante | Il dispositivo è alimentato ma non ha una connessione dati USB 3.0. | Assicurarsi che il cavo di alimentazione con il connettore cilindrico sia connesso al dispositivo e all'alimentatore USB. Assicurarsi che il cavo USB-C sia connesso al dispositivo e a una porta USB 3.0 del PC. Connettere il dispositivo a una porta USB 3.0 diversa del PC. Nel PC aprire Gestione dispositivi (Start>Pannello di controllo>Gestione dispositivi) e verificare che il PC sia dotato di un controller host USB 3.0 supportato. |
| Gialla lampeggiante | L'alimentazione del dispositivo non è sufficiente per il funzionamento. | Assicurarsi che il cavo di alimentazione con il connettore cilindrico sia connesso al dispositivo e all'alimentatore USB. Assicurarsi che il cavo USB-C sia connesso al dispositivo e al PC. |
| Gialla, quindi bianca lampeggiante | Il dispositivo è alimentato ed è in corso la ricezione di un aggiornamento firmware oppure un ripristino delle impostazioni di fabbrica. | Attendere che la luce dell'indicatore di alimentazione diventi bianca continua. Per altre informazioni, vedere Reimpostare Azure Kinect DK. |
Consumo di energia
Azure Kinect DK consuma fino a 5,9 W; il consumo di energia specifico varia a seconda del caso d'uso.
Calibrazione
Il dispositivo Azure Kinect DK viene calibrato in fabbrica. I parametri di calibrazione per i sensori visivo e inerziale possono essere sottoposti a query a livello di codice tramite Sensor SDK.
Ripristino del dispositivo
Il firmware del dispositivo può essere ripristinato sui valori originali usando il pulsante al di sotto del pin di blocco.

Per ripristinare il dispositivo, vedere queste istruzioni.