Azure Kinect ボディ トラッキングの関節
Azure Kinect ボディ トラッキングでは、複数の人間の体を同時にトラッキングできます。 各ボディには、フレームとキネマティック スケルトンの間の一時的な相関関係の ID が含まれています。 各フレームで検出されたボディの数は k4abt_frame_get_num_bodies() を使用して取得できます。
関節
関節の位置と向きは、グローバル深度センサーの参照のフレームに対する相対的な推定値です。 位置はミリメートル単位で指定します。 向きは、正規化された四元数として表されます。
関節の座標
各ジョイントの位置と向きによって、独自の右ジョイント座標系が形成されます。 すべてのジョイント座標系は、深度カメラの 3D 座標系の絶対座標系です。
注意
本文の両側にある対応するジョイントに対して軸の向きを反転させることは、両方のアームを 20 度上昇させるなどのミラー動作の動きを簡略化することを目的としています。これは、商用アバター、ゲーム エンジン、およびレンダリング ソフトウェアで一般的なものです。
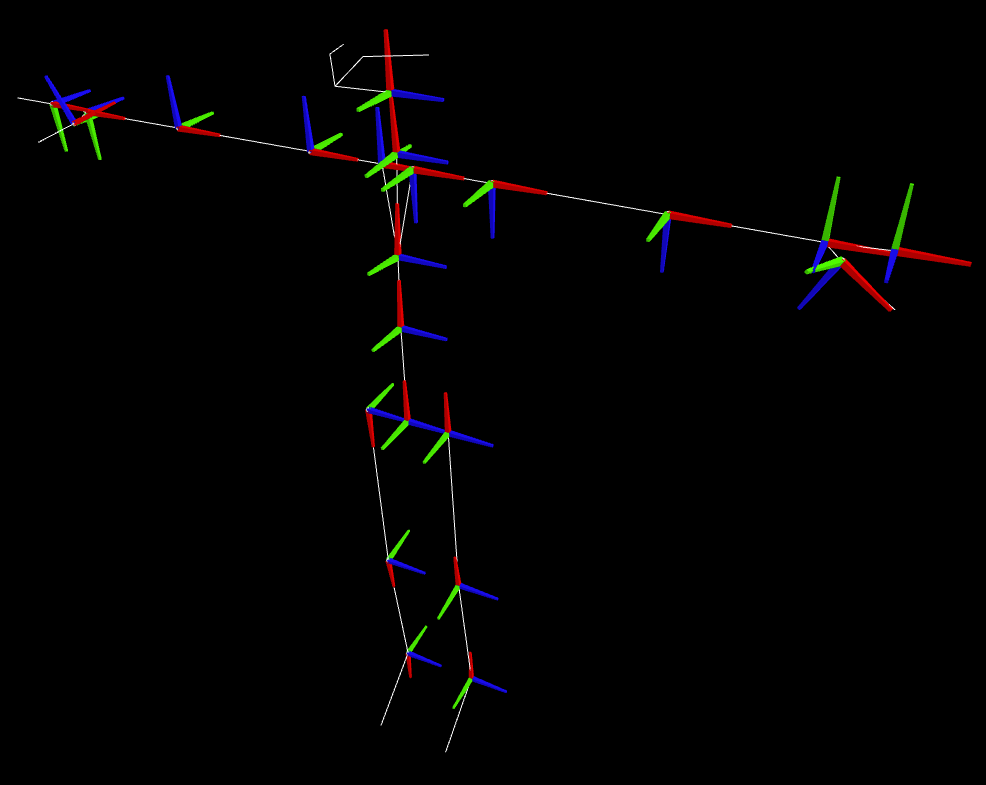
凡例: | x 軸 = 赤 | y 軸 = 緑 | z 軸 = 青 |
注意
ツールの k4abt_simple_3d_viewer.exe 視覚的な出力が反映されます。
関節の階層
スケルトンには、ボディの中心から四肢に流れる関節の階層を持つ 32 の関節が含まれています。 各接続 (ボーン) は、親関節と子関節をリンクします。 この図は、人間の体を基準とした関節の場所とその接続を示しています。
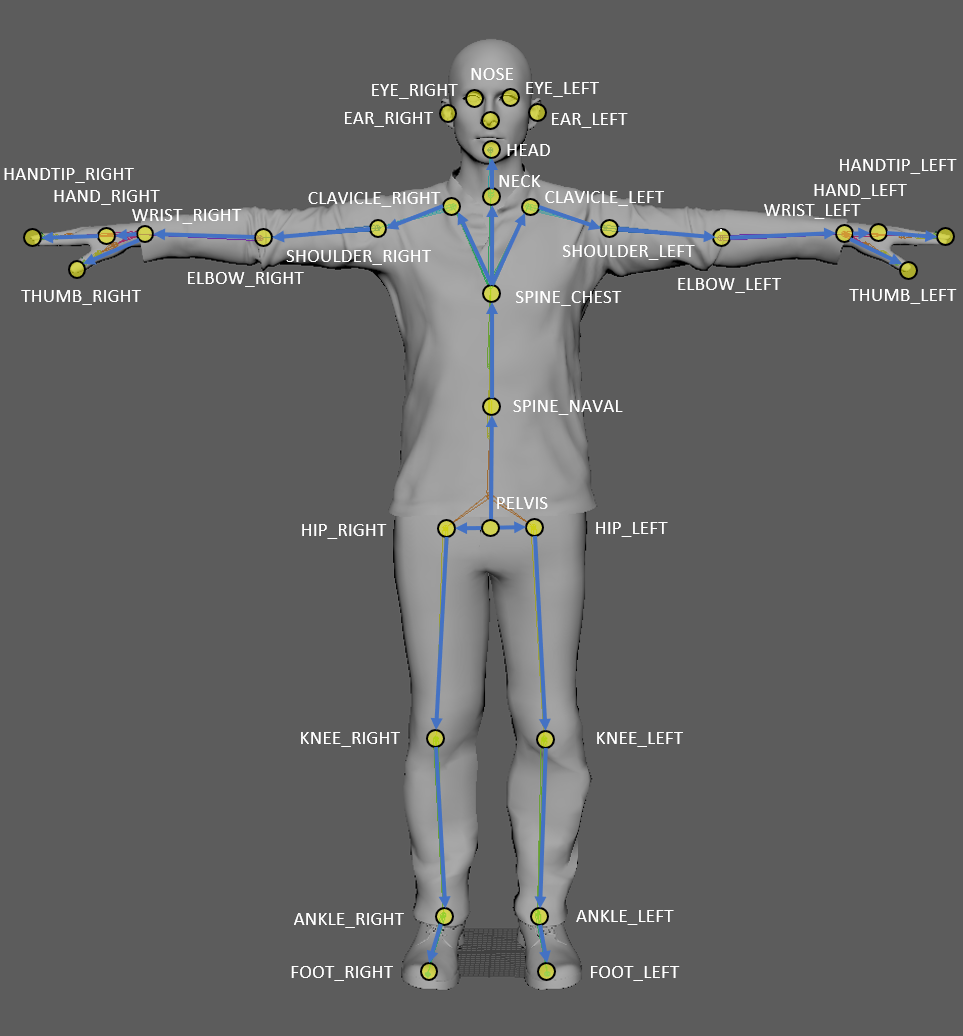
次の表は、標準的な関節の接続を列挙したものです。
| インデックス | 関節名 | 親関節 |
|---|---|---|
| 0 | PELVIS | - |
| 1 | SPINE_NAVAL | PELVIS |
| 2 | SPINE_CHEST | SPINE_NAVAL |
| 3 | NECK | SPINE_CHEST |
| 4 | CLAVICLE_LEFT | SPINE_CHEST |
| 5 | SHOULDER_LEFT | CLAVICLE_LEFT |
| 6 | ELBOW_LEFT | SHOULDER_LEFT |
| 7 | WRIST_LEFT | ELBOW_LEFT |
| 8 | HAND_LEFT | WRIST_LEFT |
| 9 | HANDTIP_LEFT | HAND_LEFT |
| 10 | THUMB_LEFT | WRIST_LEFT |
| 11 | CLAVICLE_RIGHT | SPINE_CHEST |
| 12 | SHOULDER_RIGHT | CLAVICLE_RIGHT |
| 13 | ELBOW_RIGHT | SHOULDER_RIGHT |
| 14 | WRIST_RIGHT | ELBOW_RIGHT |
| 15 | HAND_RIGHT | WRIST_RIGHT |
| 16 | HANDTIP_RIGHT | HAND_RIGHT |
| 17 | THUMB_RIGHT | WRIST_RIGHT |
| 18 | HIP_LEFT | PELVIS |
| 19 | KNEE_LEFT | HIP_LEFT |
| 20 | ANKLE_LEFT | KNEE_LEFT |
| 21 | FOOT_LEFT | ANKLE_LEFT |
| 22 | HIP_RIGHT | PELVIS |
| 23 | KNEE_RIGHT | HIP_RIGHT |
| 24 | ANKLE_RIGHT | KNEE_RIGHT |
| 25 | FOOT_RIGHT | ANKLE_RIGHT |
| 26 | HEAD | NECK |
| 27 | NOSE | HEAD |
| 28 | EYE_LEFT | HEAD |
| 29 | EAR_LEFT | HEAD |
| 30 | EYE_RIGHT | HEAD |
| 31 | EAR_RIGHT | HEAD |