ソリューションのアイデア
この記事ではソリューションのアイデアについて説明します。 クラウド アーキテクトはこのガイダンスを使用すると、このアーキテクチャの一般的な実装の主要コンポーネントを視覚化しやすくなります。 ワークロードの特定の要件に適合する、適切に設計されたソリューションを設計するための出発点として、この記事を使用してください。
このアーキテクチャでは、Custom Vision を使用して、シミュレートされたドローンで撮影された画像を分類します。 AI とモノのインターネット (IoT) を組み合わせることができます。 Azure Custom Vision は、オブジェクトの検出のために使用することもできます。
アーキテクチャ
このアーキテクチャの Visio ファイルをダウンロードします。
ワークフロー
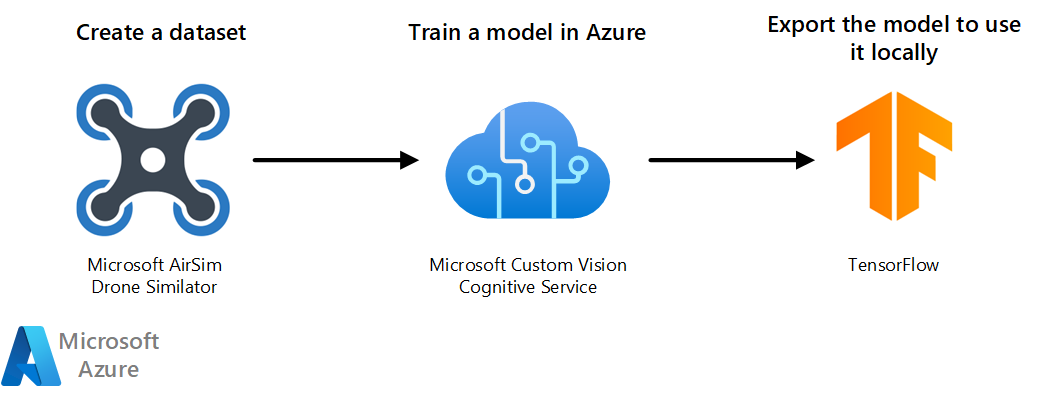
- AirSim の 3D レンダリングされた環境を使用して、ドローンで撮影した画像を取得します。 画像をトレーニング データセットとして使用します。
- データセットを Custom Vision プロジェクトにインポートしてタグ付けします。 コグニティブ サービスによって、モデルのトレーニングとテストが行われます。
- ローカルで使用できるように、モデルを TensorFlow 形式にエクスポートします。
- また、モデルをコンテナーまたはモバイル デバイスにデプロイすることもできます。
Components
Microsoft AirSim ドローン シミュレーター
Microsoft AirSim ドローン シミュレーターは、Unreal Engine を基盤としています。 このシミュレーターはオープンソースのクロス プラットフォームであり、AI 研究を支援するために開発されました。 このアーキテクチャでは、モデルのトレーニングに使用する画像のデータセットが作成されます。
Azure Custom Vision
Azure Custom Vision は、Azure Cognitive Services の一部です。 このアーキテクチャでは、画像分類器モデルが作成されます。
TensorFlow
TensorFlow は、機械学習 (ML) 用のオープンソース プラットフォームです。 これは、ML モデルの開発とトレーニングに役立つツールです。 モデルを TensorFlow 形式にエクスポートすると、スクリプト内でローカルで使用できる Custom Vision モデルが含まれたプロトコル バッファー ファイルが作成されます。
シナリオの詳細
Azure AI サービスは、人工知能 (AI) ソリューションに多くの可能性を提供します。 その 1 つが Azure Custom Vision です。Custom Vision を使用すると、独自の画像分類器を構築、デプロイ、改良できます。 このアーキテクチャでは、Custom Vision を使用して、シミュレートされたドローンで撮影された画像を分類します。 AI とモノのインターネット (IoT) を組み合わせることができます。 Azure Custom Vision は、オブジェクトの検出のために使用することもできます。
考えられるユース ケース
このソリューションは、レスキュー、シミュレーション、ロボット工学、航空機、航空宇宙、航空の各業界に最適です。
Microsoft Search and Rescue Lab では、Custom Vision の架空のユース ケースを提案しています。 ラボでは、3D レンダリングされた環境で Microsoft AirSim のシミュレートされたドローンを飛ばします。 シミュレートされたドローンを使用して、その環境内の動物の合成画像をキャプチャします。 画像のデータセットを作成したら、そのデータセットを使用して Custom Vision 分類器モデルをトレーニングします。 モデルをトレーニングするには、画像に動物の名前でタグ付けします。 もう一度ドローンを飛ばしたら、動物の新しい画像を撮影します。 このソリューションでは、新しい画像ごとに動物の名前が特定されます。
ラボの実践では、Microsoft AirSim のシミュレートされたドローンに代わって実際のドローンが使用されます。 ペットが迷子になった場合、飼い主はペットの画像を Custom Vision モデル トレーナーに提供します。 シミュレーションと同様に、画像はペットを認識するためのモデルのトレーニングに使用されます。 その後、ドローンのパイロットは、迷子になったペットがいる可能性のあるエリアを捜索します。 途中で動物が見つかると、ドローンのカメラで画像を撮影し、その動物が迷子のペットかどうかを判断できます。
このシナリオのデプロイ
このリファレンス アーキテクチャをデプロイするには、GitHub リポジトリの Search and Rescue Lab で説明されている手順に従ってください。
共同作成者
この記事は、Microsoft によって保守されています。 当初の寄稿者は以下のとおりです。
プリンシパルの作成者:
- Jose Contreras | プリンシパル ソフトウェア エンジニア
次のステップ
- Microsoft AirSim の詳細を確認する
- Azure AI Custom Vision についてさらに学習する
- Azure AI サービスの詳細を確認する
関連リソース
次に挙げる Azure アーキテクチャ センターの他の記事を参照してください。