Azure Kinect 센서 SDK 이미지 변환 사용
Azure Kinect DK에서 조정된 카메라 시스템 간에 이미지를 사용하고 변환하려면 특정 함수를 따릅니다.
k4a_transformation 함수
k4a_transformation으로 접두사가 지정된 함수는 모두 전체 이미지에 대해 작동합니다. k4a_transformation_create()를 통해 가져온 변환 핸들 k4a_transformation_t가 필요하며 k4a_transformation_destroy()를 통해 할당 해제됩니다. 또한 이 항목의 세 가지 함수를 사용하는 방법을 보여 주는 SDK 변환 예를 참조할 수 있습니다.
지원되는 함수는 다음과 같습니다.
k4a_transformation_depth_image_to_color_camera()k4a_transformation_depth_image_to_color_camera_custom()k4a_transformation_color_image_to_depth_camera()k4a_transformation_depth_image_to_point_cloud()
k4a_transformation_depth_image_to_color_camera
개요
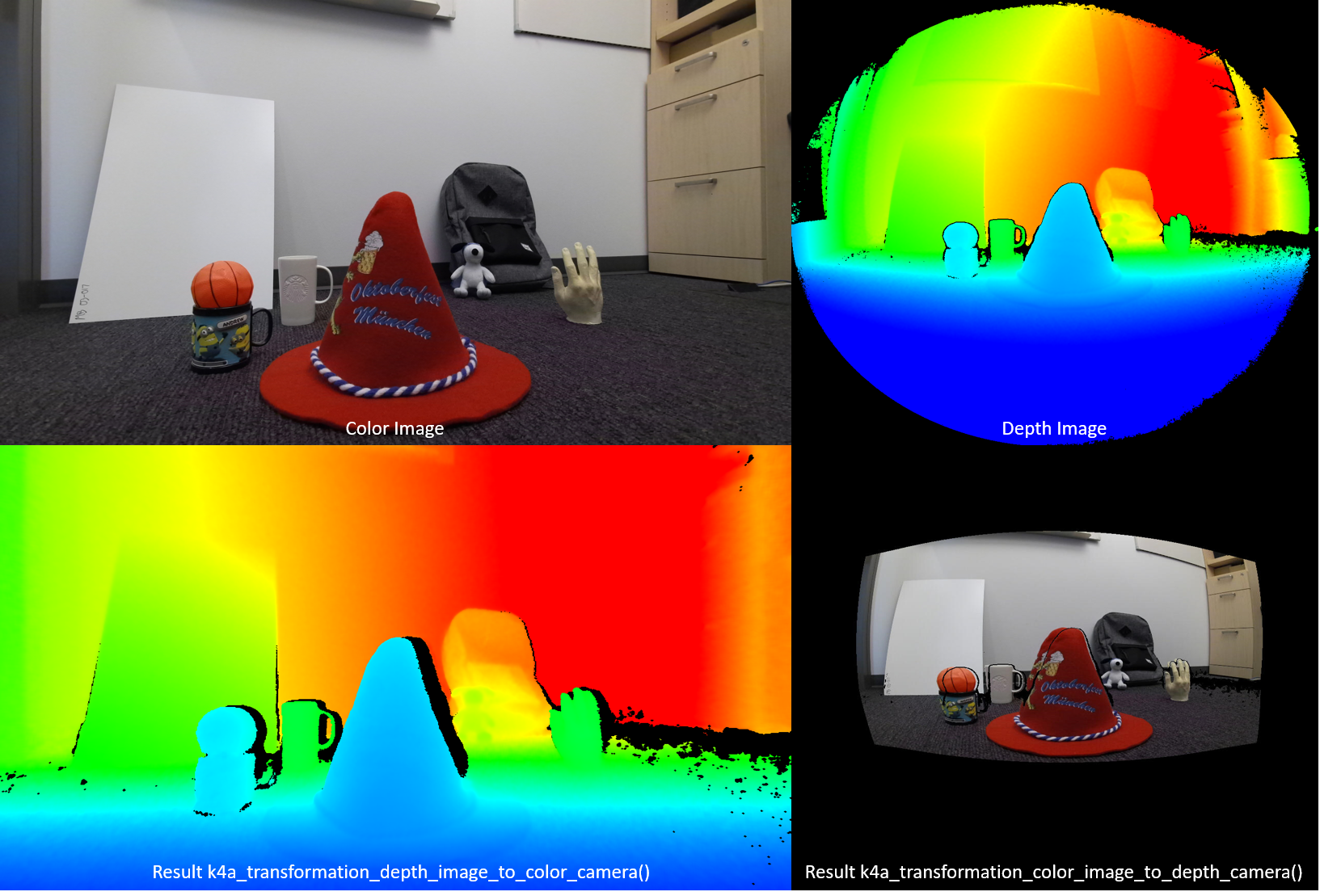
k4a_transformation_depth_image_to_color_camera() 함수는 깊이 카메라의 뷰포인트에서 색상 카메라의 뷰포인트로 깊이 맵을 변환합니다. 이 함수는 소위 RGB-D 이미지를 생성하도록 디자인되었는데 여기에서 D는 깊이 값을 기록하는 추가적인 이미지 채널을 나타냅니다. 아래 그림에서 보이는 것처럼 색상 이미지와 k4a_transformation_depth_image_to_color_camera()의 출력은 마치 동일한 뷰포인트, 즉 색상 카메라의 뷰포인트에서 찍은 것처럼 보입니다.
구현
이 변환 함수는 간단하게 모든 픽셀에 대해 k4a_calibration_2d_to_2d()를 호출하는 것보다 더 복잡합니다. 깊이 카메라의 기하 도형에서 색상 카메라의 기하 도형으로 삼각형 메시를 왜곡합니다. 삼각형 메시는 변환된 깊이 이미지에서 빈 영역이 생성되는 것을 피하기 위해 사용됩니다. Z-버퍼는 폐색이 올바르게 처리되도록 합니다. 이 함수의 경우 기본적으로 GPU 가속이 사용하도록 설정되어 있습니다.
매개 변수
입력 매개 변수는 변환 핸들 및 깊이 이미지입니다. 깊이 이미지 해상도는 변환 핸들 생성에 지정된 depth_mode와 일치해야 합니다. 예를 들어 1024x1024 K4A_DEPTH_MODE_WFOV_UNBINNED 모드를 사용하여 변환 핸들이 만들어졌다면 깊이 이미지의 해상도는 1024x1024 픽셀이어야 합니다. 출력은 k4a_image_create() 호출을 통해 사용자가 할당해야 하는 변환된 깊이 이미지입니다. 변환된 깊이 이미지 해상도는 변환 핸들 생성에 지정된 color_resolution과 일치해야 합니다. 예를 들어 색상 해상도가 K4A_COLOR_RESOLUTION_1080P로 설정되었다면 출력 이미지 해상도는 1920x1080 픽셀이어야 합니다. 이미지가 16비트 깊이 값을 저장하므로 출력 이미지 스트라이드는 width * sizeof(uint16_t)로 설정됩니다.
k4a_transformation_depth_image_to_color_camera_custom
개요
k4a_transformation_depth_image_to_color_camera_custom() 함수는 깊이 카메라의 뷰포인트에서 색상 카메라의 뷰포인트로 깊이 맵과 사용자 지정 이미지를 변환합니다. k4a_transformation_depth_image_to_color_camera()의 확장으로서 이 함수는 각 픽셀이 변환된 깊이 이미지에 추가로 색상 카메라의 해당 픽셀 좌표와 일치하는 해당 사용자 지정 이미지를 생성하도록 설계되었습니다.
구현
이 변환 함수는 k4a_transformation_depth_image_to_color_camera()와 동일한 방식으로 변환된 깊이 이미지를 생성합니다. 사용자 지정 이미지를 변환하기 위해 이 함수는 선형 보간 또는 가장 인접한 항목 보간을 사용하는 옵션을 제공합니다. 선형 보간을 사용하면 변환된 사용자 지정 이미지에 새 값을 만들 수 있습니다. 가장 인접한 항목 보간을 사용하면 원본 이미지에 없는 값이 출력 이미지에 나타나지 않도록 방지하지만 덜 부드러운 이미지가 됩니다. 사용자 지정 이미지는 단일 채널 8비트 또는 16비트여야 합니다. 이 함수의 경우 기본적으로 GPU 가속이 사용하도록 설정되어 있습니다.
매개 변수
입력 매개 변수는 변환 핸들, 깊이 이미지, 사용자 지정 이미지 및 보간 유형입니다. 깊이 이미지 및 사용자 지정 해상도는 변환 핸들 생성에 지정된 depth_mode와 일치해야 합니다. 예를 들어 1024x1024 K4A_DEPTH_MODE_WFOV_UNBINNED 모드를 사용하여 변환 핸들이 만들어졌다면 깊이 이미지 및 사용자 지정 이미지의 해상도는 1024x1024 픽셀이어야 합니다. interpolation_type은 K4A_TRANSFORMATION_INTERPOLATION_TYPE_LINEAR 또는 K4A_TRANSFORMATION_INTERPOLATION_TYPE_NEAREST여야 합니다. 출력은 k4a_image_create() 호출을 통해 사용자가 할당해야 하는 변환된 깊이 이미지 및 변환된 사용자 지정 이미지입니다. 변환된 깊이 이미지와 변환된 사용자 지정 이미지의 해상도는 변환 핸들 생성에 지정된 color_resolution과 일치해야 합니다. 예를 들어 색상 해상도가 K4A_COLOR_RESOLUTION_1080P로 설정되었다면 출력 이미지 해상도는 1920x1080 픽셀이어야 합니다. 이미지가 16비트 깊이 값을 저장하므로 출력 깊이 이미지 스트라이드는 width * sizeof(uint16_t)로 설정됩니다. 입력 사용자 지정 이미지 및 변환된 사용자 지정 이미지는 K4A_IMAGE_FORMAT_CUSTOM8 또는 K4A_IMAGE_FORMAT_CUSTOM16 형식이어야 하며 이에 따라 해당 이미지 스트라이드를 설정해야 합니다.
k4a_transformation_color_image_to_depth_camera
개요
k4a_transformation_color_image_to_depth_camera() 함수는 색상 카메라의 뷰포인트에서 깊이 카메라의 뷰포인트로 색상 이미지를 변환합니다(위의 그림 참조). RGB-D 이미지를 생성하는 데 사용할 수 있습니다.
구현
깊이 맵의 모든 픽셀에 대해서 이 함수는 픽셀의 깊이 값을 사용하여 색상 이미지의 해당 서브 픽셀 좌표를 계산합니다. 그런 다음 색상 이미지의 이 좌표에서 색상 값을 찾습니다. 색상 이미지에서 쌍선형 보간을 수행하여 서브 픽셀 정밀도의 색상 값을 얻습니다. 연결된 깊이 읽기가 없는 픽셀은 출력 이미지의 [0,0,0,0]의 BGRA 값에 할당됩니다. 이 함수의 경우 기본적으로 GPU 가속이 사용하도록 설정되어 있습니다. 이 메서드는 변환된 색상 이미지에 빈 영역을 생성하고 폐색을 처리하지 않으므로 대신 k4a_transformation_depth_image_to_color_camera() 함수를 사용하는 것이 좋습니다.
매개 변수
입력 매개 변수는 변환 핸들, 깊이 이미지 및 색상 이미지입니다. 깊이 및 색상 이미지의 해상도는 변환 핸들 생성에 지정된 depth_mode 및 color_resolution과 일치해야 합니다. 출력은 k4a_image_create() 호출을 통해 사용자가 할당해야 하는 변환된 색상 이미지입니다. 변환된 색상 이미지의 해상도는 변환 핸들 생성에 지정된 depth_resolution과 일치해야 합니다. 출력 이미지에는 모든 픽셀에 대해 BGRA를 나타내는 네 개의 8비트 값이 저장됩니다. 따라서 해당 이미지의 스트라이드는 width * 4 * sizeof(uint8_t)입니다. 데이터 순서는 픽셀 인터리브되어 있어서 파란색 값 - 픽셀 0, 녹색 값 - 픽셀 0, 빨간색 값 - 픽셀 0, 알파 값 - 픽셀 0, 파란색 값 - 픽셀 1 식으로 계속됩니다.
k4a_transformation_depth_image_to_point_cloud
개요
k4a_transformation_depth_image_to_point_cloud() 함수는 카메라가 찍은 2D 깊이 맵을 동일한 카메라의 좌표계에서 3D 포인트 클라우드로 변환합니다. 그 때문에 카메라는 깊이 카메라나 색상 카메라가 가능합니다.
구현
이 함수는 모든 픽셀에 대해 k4a_calibration_2d_to_2d()를 실행하는 것과 동등한 결과를 제공하지만 계산 측면에서 더 효율적입니다. k4a_transformation_create를 호출할 때 모든 이미지 픽셀에 대해 x 및 y배율을 저장하는 소위 xy-조회 테이블을 미리 계산합니다. k4a_transformation_depth_image_to_point_cloud()를 호출할 때 픽셀의 x 배율과 픽셀의 Z 좌표를 곱하여 픽셀의 3D X 좌표를 얻습니다. 유사하게 3D Y 좌표는 y 배율과 곱하여 계산 됩니다. SDK의 빠른 포인트 클라우드 예에서는 xy-테이블을 계산하는 방법을 보여 줍니다. 사용자는 예제 코드를 따라 이 함수의 자체적인 버전을 구현하여 예를 들어 GPU 파이프라인의 속도를 높일 수 있습니다.
매개 변수
입력 매개 변수는 변환 핸들, 카메라 지정자 및 깊이 이미지입니다. 카메라 지정자를 깊이로 설정한 경우 깊이 이미지의 해상도는 변환 핸들 생성에 지정된 depth_mode와 일치해야 합니다. 그렇지 않고 지정자를 색상 카메라로 설정한 경우 해상도는 선택한 color_resolution의 해상도와 일치해야 합니다. 출력 매개 변수는 k4a_image_create() 호출을 통해 사용자가 할당해야 하는 XYZ 이미지입니다. XYZ 이미지 해상도는 입력 깊이 맵의 해상도와 일치해야 합니다. 부호가 있는 세 개의 16비트 좌표 값을 모든 픽셀에 대해 밀리미터 단위로 저장합니다. 따라서 XYZ 이미지 스트라이드는 width * 3 * sizeof(int16_t)로 설정됩니다. 데이터 순서는 픽셀 인터리브되어 있어서 X 좌표 – 픽셀 0, Y 좌표 – 픽셀 0, Z 좌표 – 픽셀 0, X 좌표 – 픽셀 1 식으로 계속됩니다. 픽셀을 3D로 변환할 수 없는 경우 이 함수는 [0,0,0] 값을 픽셀에 할당합니다.
샘플
다음 단계
이제 Azure Kinect 센서 SDK 이미지 변환 함수를 사용하는 방법을 배웠으므로 다음 내용에 대해 알아볼 수 있습니다.
또한 다음을 검토할 수 있습니다.