Observação
O acesso a essa página exige autorização. Você pode tentar entrar ou alterar diretórios.
O acesso a essa página exige autorização. Você pode tentar alterar os diretórios.
As transformações de matriz lidam com muitos dos cálculos de baixo nível dos gráficos 3D.
O pipeline de geometria recebe vértices como entrada. O mecanismo de transformação aplica as transformações de mundo, de visualização e de projeção aos vértices, recorta o resultado e passa tudo para o rasterizador.
| Transformação e espaço | Descrição |
|---|---|
| Coordenadas de modelo no espaço do modelo | No início do pipeline, os vértices de um modelo são declarados em relação a um sistema de coordenadas local. Essa é uma origem local e uma orientação. Essa orientação de coordenadas geralmente é conhecida como espaço de modelo. Coordenadas individuais são chamadas de coordenadas de modelo. |
| Transformação do mundo em espaço mundial | O primeiro estágio do pipeline de geometria transforma os vértices de um modelo de seu sistema de coordenadas local para um sistema de coordenadas que é usado por todos os objetos em uma cena. O processo de reorientar os vértices é chamado de transformação World , que converte do espaço de modelo para uma nova orientação chamada de espaço global . Cada vértice no espaço mundial é declarado usando coordenadas mundo. |
| Exibir transformação em espaço de exibição (espaço da câmera) | No próximo estágio, os vértices que descrevem seu mundo 3D são orientados em relação a uma câmera. Ou seja, seu aplicativo escolhe um ponto de vista para a cena e as coordenadas de espaço do mundo são realocadas e giradas em torno da exibição da câmera, transformando o espaço do mundo em espaço de exibição (também conhecido como espaço de câmera). Este é o transformador View, que converte do espaço de mundo para o espaço de visualização. |
| Transformação de projeção em espaço de projeção | O próximo estágio é a transformação Projeção, que converte do espaço de exibição para o espaço de projeção. Nesta parte do pipeline, os objetos geralmente são dimensionados em relação à distância do observador, a fim de dar a ilusão de profundidade a uma cena; objetos próximos parecem maiores do que objetos distantes. Para simplificar, esta documentação refere-se ao espaço no qual os vértices existem após à transformação projetiva como espaço de projeção. Alguns livros sobre gráficos podem se referir ao espaço de projeção como espaço homogêneo pós-perspectiva. Nem todas as transformações de projeção dimensionam o tamanho dos objetos em uma cena. Uma projeção como essa às vezes é chamada de de afim ou de projeção ortogonal. |
| Recorte no espaço da tela | Na parte final do pipeline, todos os vértices que não estarão visíveis na tela são removidos, de modo que o rasterizador não tenha tempo para calcular as cores e o sombreamento para algo que nunca será visto. Esse processo é chamado de recorte. Após o recorte, os vértices restantes são dimensionados de acordo com os parâmetros da janela de exibição e convertidos em coordenadas de tela. Os vértices resultantes, vistos na tela quando a cena é rasterizada, existem em espaço de tela. |
As transformações são usadas para converter a geometria do objeto de um espaço de coordenadas em outro. O Direct3D usa matrizes para executar transformações 3D. Matrizes criam transformações 3D. Você pode combinar matrizes para produzir uma única matriz que engloba várias transformações.
Você pode transformar coordenadas entre o espaço do modelo, o espaço mundial e o espaço de exibição.
- World transform – Converte do espaço modelo para o espaço mundial.
- Transformação de visualização - Converte do espaço do mundo para o espaço de visualização.
- Transformação de projeção - converte do espaço de visualização para o espaço de projeção.
Transformações de Matriz
Em aplicativos que funcionam com gráficos 3D, você pode usar transformações geométricas para fazer o seguinte:
- Expresse a localização de um objeto em relação a outro objeto.
- Girar e dimensionar objetos.
- Alterar as posições de exibição, as direções e as perspectivas.
Você pode transformar qualquer ponto (x,y,z) em outro ponto (x', y', z') usando uma matriz 4x4, conforme mostrado na equação a seguir.
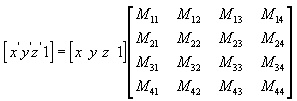
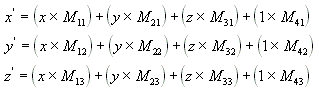
Execute as seguintes equações em (x, y, z) e a matriz para produzir o ponto (x', y', z').
As transformações mais comuns são tradução, rotação e dimensionamento. Você pode combinar as matrizes que produzem esses efeitos em uma única matriz para calcular várias transformações ao mesmo tempo. Por exemplo, você pode criar uma única matriz para traduzir e girar uma série de pontos.
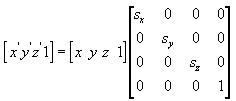
Matrizes são escritas na ordem linha-coluna. Uma matriz que dimensiona uniformemente vértices ao longo de cada eixo, conhecida como dimensionamento uniforme, é representada pela matriz a seguir usando notação matemática.
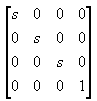
No C++, o Direct3D declara matrizes como uma matriz bidimensional usando um struct de matriz. O exemplo a seguir mostra como inicializar uma estrutura D3DMATRIX para atuar como uma matriz de dimensionamento uniforme (fator de escala "s").
D3DMATRIX scale = {
5.0f, 0.0f, 0.0f, 0.0f,
0.0f, 5.0f, 0.0f, 0.0f,
0.0f, 0.0f, 5.0f, 0.0f,
0.0f, 0.0f, 0.0f, 1.0f
};
Traduzir
A equação a seguir converte o ponto (x, y, z) para um novo ponto (x', y', z').
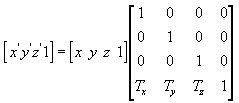
Você pode criar manualmente uma matriz de tradução no C++. O exemplo a seguir mostra o código-fonte de uma função que cria uma matriz para traduzir vértices.
D3DXMATRIX Translate(const float dx, const float dy, const float dz) {
D3DXMATRIX ret;
D3DXMatrixIdentity(&ret);
ret(3, 0) = dx;
ret(3, 1) = dy;
ret(3, 2) = dz;
return ret;
} // End of Translate
Escala de
A equação a seguir dimensiona o ponto (x, y, z) por valores arbitrários nas direções x, y e z para um novo ponto (x', y', z').
Girar
As transformações descritas aqui são para sistemas de coordenadas esquerdos e podem, portanto, ser diferentes das matrizes de transformação que você viu em outro lugar.
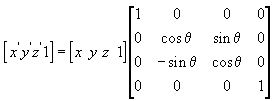
A equação a seguir gira o ponto (x, y, z) em torno do eixo x, produzindo um novo ponto (x', y', z').
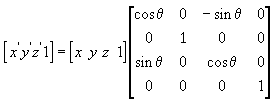
A equação a seguir gira o ponto em torno do eixo y.
A equação a seguir gira o ponto em torno do eixo z.
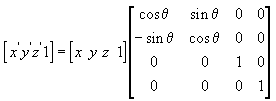
Nestas matrizes de exemplo, a letra grega theta significa o ângulo de rotação, em radianos. Os ângulos são medidos no sentido horário ao olhar ao longo do eixo de rotação em direção à origem.
O código a seguir mostra uma função para lidar com a rotação sobre o eixo X.
// Inputs are a pointer to a matrix (pOut) and an angle in radians.
float sin, cos;
sincosf(angle, &sin, &cos); // Determine sin and cos of angle
pOut->_11 = 1.0f; pOut->_12 = 0.0f; pOut->_13 = 0.0f; pOut->_14 = 0.0f;
pOut->_21 = 0.0f; pOut->_22 = cos; pOut->_23 = sin; pOut->_24 = 0.0f;
pOut->_31 = 0.0f; pOut->_32 = -sin; pOut->_33 = cos; pOut->_34 = 0.0f;
pOut->_41 = 0.0f; pOut->_42 = 0.0f; pOut->_43 = 0.0f; pOut->_44 = 1.0f;
return pOut;
}
Concatenando Matrizes
Uma vantagem de usar matrizes é que você pode combinar os efeitos de duas ou mais matrizes multiplicando-as. Isso significa que, para girar um modelo e traduzi-lo para algum local, você não precisa aplicar duas matrizes. Em vez disso, você multiplica as matrizes de rotação e tradução para produzir uma matriz composta que contenha todos os efeitos. Esse processo, chamado concatenação de matriz, pode ser escrito com a equação a seguir.

Nesta equação, C é a matriz composta que está sendo criada e M₁ por meio de Mn são as matrizes individuais. Na maioria dos casos, apenas duas ou três matrizes são concatenadas, mas não há limite.
A ordem na qual a multiplicação de matriz é executada é crucial. A fórmula anterior reflete a regra da esquerda para a direita da concatenação de matriz. Ou seja, os efeitos visíveis das matrizes que você usa para criar uma matriz composta ocorrem em ordem da esquerda para a direita. Uma matriz de mundo típica é mostrada no exemplo a seguir. Imagine que você está criando a matriz mundial para um disco voador estereotipado. Você provavelmente gostaria de girar o disco voador em torno de seu centro - o eixo y do espaço modelo - e movê-lo para algum outro local em sua cena. Para realizar esse efeito, primeiro crie uma matriz de rotação e, em seguida, multiplique-a por uma matriz de tradução, conforme mostrado na equação a seguir.

Nesta fórmula, Ry é uma matriz para rotação sobre o eixo y e Tw é uma tradução para alguma posição em coordenadas mundiais.
A ordem na qual você multiplica as matrizes é importante porque, ao contrário da multiplicação de dois valores escalares, a multiplicação de matriz não é comutativa. Multiplicar as matrizes na ordem oposta tem o efeito visual de mover o disco voador para sua posição espacial mundial e, em seguida, girá-lo ao redor da origem mundial.
Não importa o tipo de matriz que você está criando, lembre-se da regra da esquerda para a direita para garantir que você alcance os efeitos esperados.
Tópicos relacionados