Observação
O acesso a essa página exige autorização. Você pode tentar entrar ou alterar diretórios.
O acesso a essa página exige autorização. Você pode tentar alterar os diretórios.
Muitos aplicativos CAD fornecem recursos que giram objetos desenhados na área do cliente. Aplicativos que incluem recursos de rotação usam a função SetWorldTransform para definir o espaço de mundo apropriado para a transformação de espaço de página. Essa função recebe um ponteiro para uma estrutura deXFORMque contém os valores apropriados. Os membros eM11, eM12, eM21 e eM22 do XFORM especificam, respectivamente, o cosseno, o seno, o seno negativo e o cosseno do ângulo de rotação.
Quando rotação ocorre, os pontos que constituem um objeto são girados em relação à origem do espaço de coordenadas. A ilustração a seguir mostra um retângulo de 20 por 20 unidades girado 30 graus quando copiado do espaço de coordenadas do mundo para o espaço de coordenadas de página.
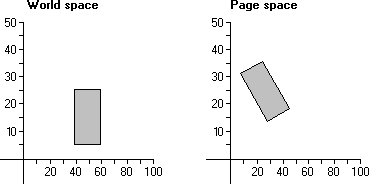
Na ilustração anterior, cada ponto no retângulo era girado 30 graus em relação à origem do espaço de coordenadas.
O algoritmo a seguir calcula a nova coordenada x (x ') para um ponto (x,y ) que é girado pelo ângulo A em relação à origem do espaço de coordenadas.
x' = (x * cos A) - (y * sin A)
O algoritmo a seguir calcula a coordenada y (y ') para um ponto (x,y) que é girado pelo ângulo A em relação à origem.
y' = (x * sin A) + (y * cos A)
As duas transformações de rotação podem ser combinadas em uma matriz 2 por 2 da seguinte maneira.
|x' y'| == |x y| * | cos A sin A|
|-sin A cos A|
A matriz 2 por 2 que produziu a rotação contém os valores a seguir.
| .8660 .5000|
|-.5000 .8660|
Derivação do algoritmo de rotação
Algoritmos de rotação são baseados no teorema de adição da trigonometria informando que a função trigonométrica de uma soma de dois ângulos (A1 e A2 ) pode ser expressa em termos das funções trigonométricas dos dois ângulos.
sin(A1 + A2) = (sin A1 * cos A2) + (cos A1 * sin A2)
cos(A1 + A2) = (cos A1 * cos A2) - (sin A1 * sin A2)
A ilustração a seguir mostra um ponto p girado no sentido anti-horário para uma nova posição p'. Além disso, ele mostra dois triângulos formados por uma linha desenhada da origem do espaço de coordenadas para cada ponto e uma linha desenhada de cada ponto pelo eixo x.
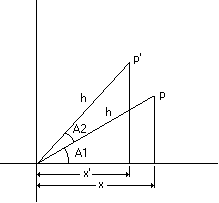
Usando trigonometria, a coordenada x do ponto p pode ser obtida multiplicando o comprimento da hipotenusa h pelo cosseno de A1.
x = h * cos A1
A coordenada y do ponto p pode ser obtida multiplicando o comprimento do hipotenuário h pelo seno de A1.
y = h * sin A1
Da mesma forma, a coordenada x do ponto p' pode ser obtida multiplicando o comprimento do hipotenuoso h pelo cosseno de (A1 +A2).
x' = h * cos (A1 + A2)
Por fim, a coordenada y do ponto p' pode ser obtida multiplicando o comprimento do hipotenuoso h pelo seno de (A1 +A2).
y' = h * sin (A1 + A2)
Usando o teorema de adição, os algoritmos anteriores tornam-se os seguintes:
x' = (h * cos A1 * cos A2) - (h * sin A1 * sin A2)
y' = (h * cos A1 * sin A2) + (h * sin A1 * cos A2)
Os algoritmos de rotação para um determinado ponto girado por ângulo A2 podem ser obtidos substituindo x por cada ocorrência de (h * cos A1 ) e substituindo y por cada ocorrência de (h * sin A1).
x' = (x * cos A2) - (y * sin A2)
y' = (x * sin A2) + (y * cos A2)