Использование средства точного сенсорного тестирования
Средство точного тестирования сенсорного ввода (PT3) — это многофункциональное средство, которое тестирует высокопроизводительные сенсорные дигитайзеры на соответствие тестам windows Hardware Lab Kit для Windows 8. Он может работать на уровнях производительности, где не хватает точности оператора человека. Он может точно касаться в определенной точке, быстро перестраивать, прекрасно отслеживать до пяти прямых линий одновременно, рисовать кривые фиксированного радиуса и поддерживать регулируемые расстояния между соседними контактами.
PT3 хорошо выполняет все эти задачи, но его производительность не делает эти задачи тривиальными. Вы должны попрактиковаться и подготовиться к комфортному использованию PT3.
Терминология и визуальная ориентация
На следующих рисунках показана терминология и визуальная ориентация PT3, на которую ссылается этот раздел.
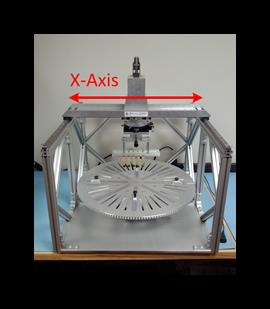
Рис. 1. Ось X
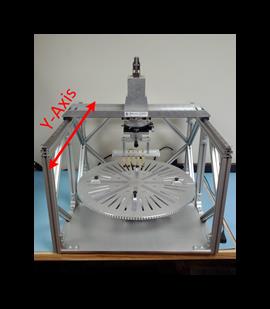
Рис. 2. Ось Y
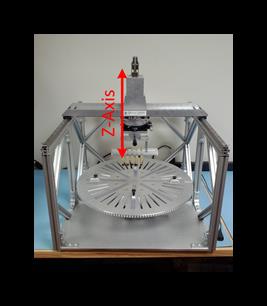
Рис. 3. Ось Z
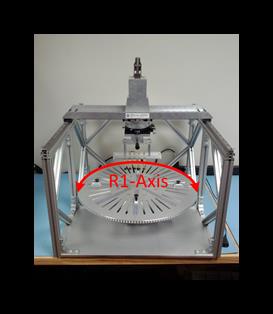
Рис. 4. Ось R1
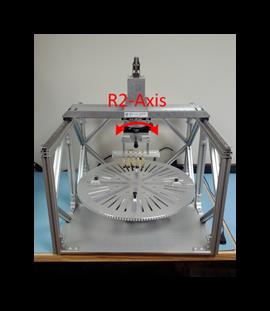
Рис. 5. Ось R2
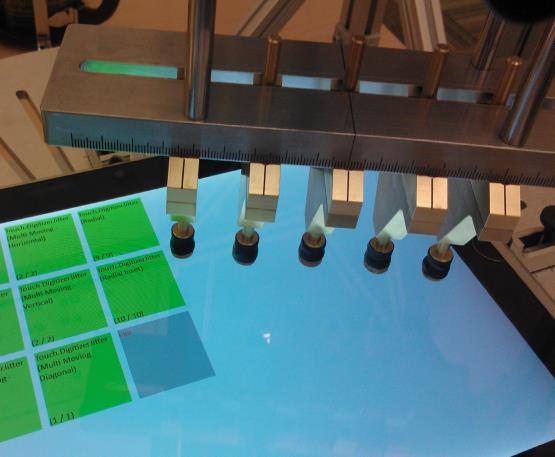
Рис. 6. Приводы в каретке
Кроме того:
Ось R2 также называется базовой пластиной.
Ось R1 также называется этапом поворота.
DUT расшифровывается как устройство в тесте.
Привод — это модуль, похожий на палец, используемый для сенсорного касания экрана. На рис. 6 показано пять приводов.
Каретки является металлическим элементом, который содержит приводы. Показано на рис. 6.
Базовое использование
Поместите DUT в корпус
PT3 имеет четыре блокировки для фиксации DUT в корпусе. Рекомендуется расположить устройство так, чтобы центр его экрана был концентрирован с базовой пластиной; Это упрощает выравнивание во многих случаях. Для облегчения этого на пластине рисуется шкала. Зазор в центре базовой пластины составляет 3 см в диаметре.
Рекомендуется расположить устройство так, чтобы устройство было обращено к тестировщику в положении 0°.
Размещение привода и контакт
Корпус привода свободно перемещается вдоль четырех осей: горизонтально и вертикально в плоскости базовой пластины, вверх и вниз перпендикулярно базовой пластине (ось Z) и вращательно в плоскости базовой пластины.
Движение по осям X и Y можно ограничить с помощью блокировок, расположенных на направляющих, как показано на рисунках 1 и 2. Вы можете ограничить вращающееся движение, повернув ручку, расположенную сбоку корпуса привода (показано на рис. 5).
Привод (или приводы) соприкасается с экраном с помощью красного рычага на верхней части корпуса привода, который перемещает приводы вдоль оси Z. Когда в каретки помещаются пять приводов, пружина будет балансировать приводы, чтобы они могли оставаться плавающими в положении.
Пользовательский интерфейс тестов Windows Hardware Lab Kit (Windows HLK) предоставляет возможности для точного нацеливания. Каждый целевой объект отображается в виде набора перекрестий внутри пары концентрических кругов. Внутренний круг, окрашенный зеленым или желтым цветом, имеет диаметр 9 мм, а внешний — 10 мм. Расположите привод так, чтобы он содержался в ближайшем круге как можно лучше. Используйте перекрестье, чтобы лучше расположить центр привода в центре цели.
Трассировка строки
Линейное перемещение обычно выполняется вдоль оси Y, при этом ось X и этап поворота блокируются. Это обеспечивает максимальную простоту использования. Выравнивание обычно выполняется следующим образом:
Заблокируйте этап поворота на 0°.
Переместите корпус привода вдоль оси X и расположите его над начальным целевым объектом, который будет зеленым.
Примерно выровняйте линию экрана по оси Y, вращая базовую пластину.
Не соприкасаясь с экраном, отслеживайте линию на экране до конца желтого целевого объекта. Для исправления выравнивания используйте ручку точной корректировки.
Повторяйте шаги 2–4, пока линия не будет трассирована от центра зеленого целевого объекта до центра желтого целевого объекта.
Ярлыки
При выполнении следующих условий можно значительно сэкономить время на согласовании приводов:
Экран прямоугольный.
Смежные края устройства расположены на 90° друг к другу.
В этом случае можно использовать ось R1 для выполнения всех выравниваний в горизонтальном и вертикальном вариантах, просто блокируя этап поворота (R2) на 0° и расположив ось R1 на 0°, 90°, 180° или 270°, как это и требуется. Если экран находится по центру на устройстве, а само устройство находится по центру в PT3, для выравнивания по диагонали можно использовать углы 45° на этапе поворота.
Трассировка кривой
Кривые отслеживаются с помощью движения оси R2 или этапа поворота. Центр каретки четко обозначен, так что круги разных радиусов можно быстро настроить. Тест использует три радиуса: 1,2 см, 3 см и 3,2 см.
Чтобы отследить кривую, сначала выровняйте начальную точку или точки движения. Затем заблокируйте движение осей x и y с помощью переключателей блокировки. Наконец, используйте маркер, прикрепленный к корпусу привода, для поворота вокруг центра каретки.
Настройка приводов
Приводы прикрепляются к каретки магнитами. Чтобы добавить привод, просто поместите его в вогнутую низу каретки, пока он не защелкнулся на месте. Чтобы снять привод, наклоните его, пока он не станет свободным, и вытащите его вниз и из каретки.
Положение привода можно задать с шагом в один миллиметр с помощью шкалы на каретки. Например, это позволяет задать пять контактов на расстоянии 13 мм от центра до 13 мм для выполнения тестов по горизонтальному и вертикальному разделению входных данных.
Выполнение тестов
Для успешного выполнения трех тестовых заданий требуется использование средств точности (хотя это не обязательно верно, что для каждого случая в тестовом задании требуются средства точности). В этом разделе описывается использование PT3 для прохождения этих тестовых заданий.
Диджитатор дигитайзера
Один стационарный
Конфигурация:
Один привод
Вращаемая стадия заблокирована
Чтобы выполнить эти тестовые случаи, разместите привод над зеленой областью и заблокируйте обе оси X и Y. После этого потяните за рычаг, чтобы установить контакт с экраном, и удерживайте контакт по крайней мере одну секунду. Повторяйте для каждого целевого объекта, пока не завершится тест.
Несколько стационарных
Конфигурация:
Пять приводов
Не менее 20 мм между соседними приводами
Вращаемая стадия заблокирована
Чтобы выполнить этот тест, расположите все приводы над зеленой областью и заблокируйте оси X и Y. Затем потяните за рычаг, чтобы установить контакт с экраном, и удерживайте контакт не менее 15 секунд. Повторяйте для каждого целевого объекта, пока не завершится тест. Обратите внимание, что слишком быстрое приведение приводов к контакту может привести к их отскоку на экране, что приведет к сбою. Мы рекомендуем медленно свести приводы и разрешить оставаться в контакте более 15 секунд.
Единственное движение
Конфигурация:
Один привод
Вращаемая стадия заблокирована
Существует четыре варианта: горизонтальный, вертикальный, диагональный (слева направо) и диагональный (справа налево). Каждый случай выполняется одинаково.
Сначала выровняйте движение по строке, отображаемой на экране, следуя инструкциям в разделе Основные сведения об использовании этой статьи. Расположите привод над зеленой целью, чтобы контактная область привода была внутри зеленой области. Используйте концентрические круги и перекрестия в качестве направляющей. Приведите привод в контакт с экраном в центре зеленого целевого объекта и перетащите его в центр желтого целевого объекта. Минимальная или максимальная скорость отсутствует.
Несколько перемещений
Конфигурация:
Пять приводов
Не менее 20 мм между соседними приводами
Вращаемая стадия заблокирована
Существует четыре варианта: горизонтальный, вертикальный, диагональный (слева направо) и диагональный (справа налево). Каждый случай выполняется одинаково.
Сначала выровняйте движение по линиям, отображаемым на экране, следуя инструкциям, приведенным в разделе Основные сведения об использовании этого документа. Расположите приводы над зелеными целевыми объектами, чтобы контактная область каждого привода была внутри зеленой области соответствующего целевого объекта. Используйте концентрические круги и перекрестия в качестве направляющей. Приведите приводы в контакт с экраном в центрах зеленых целей и перетащите их к центрам желтых целей. Минимальная или максимальная скорость отсутствует.
Примечание
Важно, чтобы ось R2 была заблокирована в положении 0°, иначе будет сложнее выровнять приводы по целевым объектам.
Радиальные
Конфигурация:
Два привода
Каждый привод размещается в 3 см от центра каретки
Вращаемый этап разблокирован
Этот тест был разделен на две области: одна для охвата левой части экрана, а другая — для охвата правой части экрана.
Сначала зафиксировать два привода к каретки на расстоянии 5 см от центра. Поместите каждый привод над зеленым целевым объектом и убедитесь, что он находится по центру. Затем поворачивайте в направлении, указанном линиями, отображаемыми на экране, до достижения конечных точек.
Примечание
Проще всего выровнять приводы и выполнить движение, если базовая пластина повернута таким образом, чтобы короткая сторона устройства обращена к тестировщику (как правило, с базовой пластиной в положении 90° или 270°).
Радиальная вставка
Конфигурация:
Два привода
Один привод 1,2 см от центра, другой 3,2 см от центра
Вращаемый этап разблокирован
Этот тест был разделен на две области: одна для охвата левой части экрана, а другая — для охвата правой части экрана.
Чтобы выполнить эту проверку, прикрепите два привода к каретки, каждый из которых к одной стороне центра. Внутренний полукругов имеет радиус 1,2 см, а внешний — 3,2 см. Как и в случае с радиальным тестом, обратите внимание на направление, указанное программным обеспечением перед началом движения.
Перемещение и удержание
Конфигурация:
Один привод
Вращаемая стадия заблокирована
Чтобы выполнить тест, просто отследите прямую линию от зеленого целевого объекта до желтого, а затем удерживайте на желтом целевом объекте по крайней мере пять секунд.
Разделение входных данных
По вертикали или горизонтали
Конфигурация:
Пять приводов
Четыре привода на взаимном расстоянии 13 мм
Пятый привод 24 мм от соседнего привода
Вращаемая стадия заблокирована
Настройте приводы таким образом, чтобы первые четыре были разделены расстоянием 13 мм. Исправьте последний и крайний правый привод на 24 мм от соседнего привода. С этого момента следуйте инструкциям в многодвижном тесте.
Diagonal
Конфигурация:
Пять приводов
Каждый привод находится на 15 мм от любого из его соседей
Вращаемая стадия заблокирована
Следуйте инструкциям в многодвижном тесте .
Схождение
Конфигурация:
Конвергентное вложение, зафиксированное в каретки
Вращаемая стадия заблокирована
В этом тесте представлены четыре варианта, все одинаковые, за исключением размещения.
Чтобы выполнить этот тест, установите два привода в корпусе, чтобы они были сосредоточены на двух начальных точках. Предусмотрена блокировка, чтобы контакты не сдвинулись в более широкое положение. Затем опустите приводы, пока они не вступают в твердый контакт с экраном, и сразу же приведите их в центральное положение. Немедленно поднимите приводы. Вложение предназначено для того, чтобы привести приводы на расстояние 12 мм от центра к центру.
Примечание
Вы должны завершить жест в течение пяти секунд после того, как первый привод касается экрана.
Разделение входных данных
По вертикали или горизонтали
Конфигурация:
Пять приводов
Четыре привода на взаимном расстоянии 13 мм
Пятый привод 24 мм от соседнего привода
Вращаемая стадия заблокирована
Настройте приводы так, чтобы первые четыре привода были разделены расстоянием 13 мм. Исправьте последний и крайний правый привод на 24 мм от соседнего привода. С этого момента следуйте инструкциям в многодвижном тесте.
Diagonal
Конфигурация:
Пять приводов
Каждый привод находится на 15 мм от любого из его соседей
Вращаемая стадия заблокирована
Следуйте инструкциям в многодвижном тесте .
Схождение
Конфигурация:
Конвергентное вложение, зафиксированное в каретки
Вращаемая стадия заблокирована
В этом тесте представлены четыре варианта, все одинаковые, за исключением размещения.
Чтобы выполнить этот тест, установите два привода в корпусе, чтобы они были сосредоточены на двух начальных точках. Предусмотрена блокировка, чтобы контакты не сдвинулись в более широкое положение. Затем опустите приводы, пока они не вступают в твердый контакт с экраном, и сразу же приведите их в центральное положение. Немедленно поднимите приводы. Вложение предназначено для того, чтобы привести приводы на расстояние 12 мм от центра к центру.
Примечание
Вы должны завершить жест в течение пяти секунд после того, как первый привод касается экрана.
Физическое положение входных данных
Точность
Конфигурация:
Один привод
Вращаемая стадия заблокирована
Этот тест можно выполнить только с помощью сведений, содержащихся в разделе "Позиционирование привода и создание контакта", но следующее обсуждение будет полезным.
Тест был секционирован, чтобы воспользоваться механизмом блокировки средства. Предполагается, что ось Y должна быть заблокирована во время каждого теста ребра, чтобы корпус привода можно было скользить по оси X для размещения над каждой целью.
Предлагаемый метод для выполнения касания заключается в том, чтобы следовать инструкциям в разделе "Позиционирование привода и создание контакта", за исключением использования рычага только для перемещения на короткое расстояние (около 1 см) над экраном и коснитесь верхней части привода, чтобы доставить движение вдоль оси Z. Приводы допускают это движение, и пружины возвращают их в положение над экраном для касания умеренной силы. Для поиска надлежащего баланса требуется определенная практика, но этот метод быстрее, чем использование рычага для доставки контакта в этом тесте.
Допустимое значение по оси Z
Конфигурация:
- Пять приводов
Чтобы завершить этот тест, опустите приводы к экрану, пока между экраном и ближайшим приводом не будет 1 мм пространства. Разрешите приводам плавать на этом расстоянии в течение всего теста.
Предлагаемый метод для выполнения касания заключается в том, чтобы следовать инструкциям в разделе "Позиционирование привода и создание контакта", за исключением использования рычага только для перемещения на короткое расстояние (около 1 см) над экраном и коснитесь верхней части привода, чтобы доставить движение вдоль оси Z. Приводы допускают это движение, и пружины возвращают их в положение над экраном для касания умеренной силы. Для поиска надлежащего баланса требуется определенная практика, но этот метод быстрее, чем использование рычага для доставки контакта в этом тесте.
Дополнительные инструкции для устройства ITRI PT3
Оборудование:
ITRI PT3 с механизмом перемещения X/Y/Z
Кабель X, Y, Z и кабель USB-RS232C
CCD-камера и USB-кабель
Кабель питания
Компакт-диск и программное обеспечение для установки TouchWhere
3-осевой дисплей
Вам также потребуется компьютер для запуска и отображения программного обеспечения камеры.
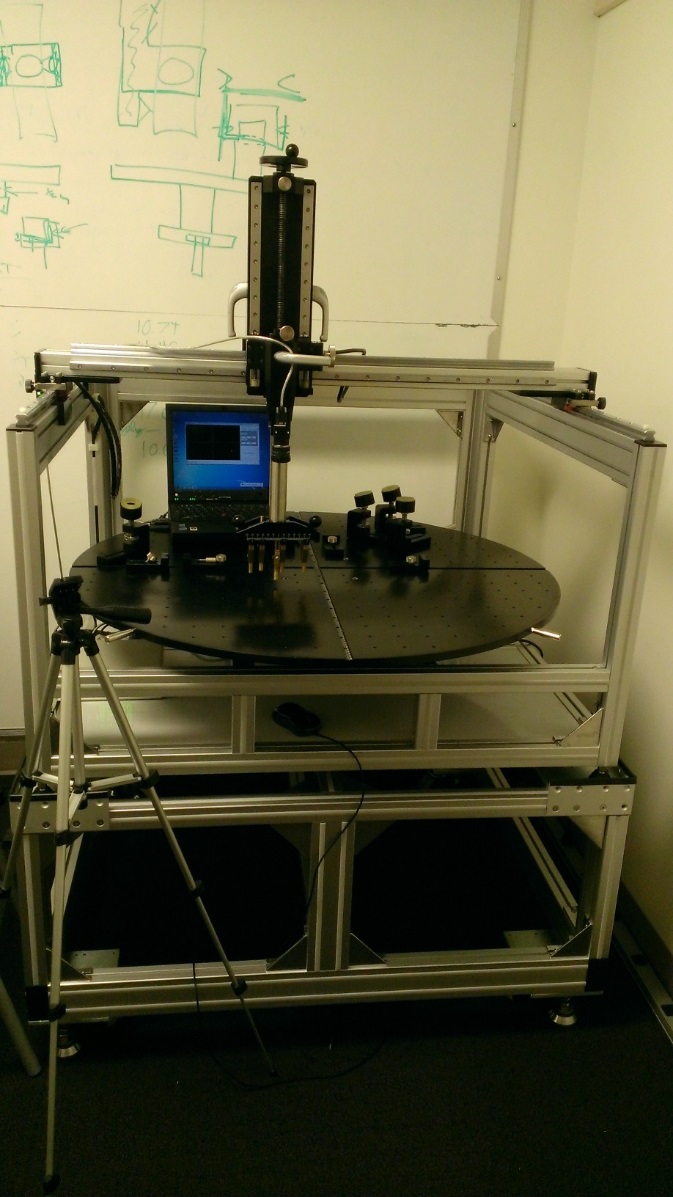
Рис. 7. Большой PT3 производства ITRI
Установки
Подключение кабеля X, Y, Z от PT3 к 3-оси дисплея
Подключите кабель USB RS232C от 3-осного дисплея к кабелю камеры CCD
Подключение USB-адаптера к компьютеру и установка USB-драйвера
Установка программного обеспечения TouchWhere
Установка драйвера CCD на компьютере
Калибровки
Запустите программное обеспечение TouchWhere и touch_all.exe. Убедитесь, что в левом нижнем углу экрана зеленая точка указывает, что компьютер подключен к камере CCD. Красная точка указывает, что камера не взаимодействует с компьютером.
На вкладке Конфигурация введите значения X и Y с 3-осного дисплея и COM-порта, к которому подключена камера.
На вкладке Калибровка выровняйте проверочный палец на PT3 по зеленому кругу, показанном на странице, и нажмите кнопку Начальная точка. Сделайте то же самое для желтого круга и щелкните Конечная точка. Затем щелкните Выполнить калибровку. При выравнивании проверочного пальца для всех тестов поместите палец так, чтобы смещения X и Y были как можно ближе к 0.
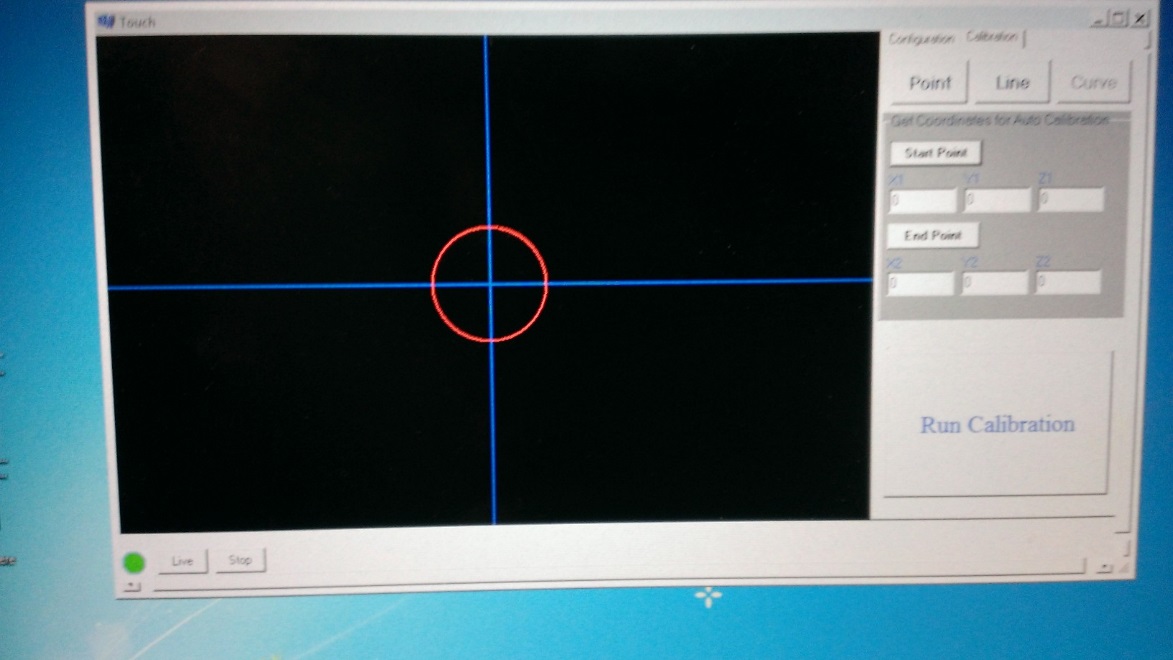
Рис. 8. Программное обеспечение TouchWhere, показывающее, как откалибровать камеру с помощью DUT
Важно!
Убедитесь, что тестируемое устройство находится на уровне, когда вы помещаете его на базовую пластину PT3.