Not
Bu sayfaya erişim yetkilendirme gerektiriyor. Oturum açmayı veya dizinleri değiştirmeyi deneyebilirsiniz.
Bu sayfaya erişim yetkilendirme gerektiriyor. Dizinleri değiştirmeyi deneyebilirsiniz.
Bir aralığın koşulla eşleşmeyen öğelerini filtreleyen bir görünüm.
Sözdizimi
template<ranges::input_range V, indirect_unary_predicate<iterator_t<V>> Pred>
requires view<V> && is_object_v<Pred>
class filter_view : public view_interface<filter_view<V, Pred>>;
Şablon parametreleri
V
Temel alınan aralığın türü.
Pred
Tutulacak öğeleri belirleyen koşulun türü.
Özellikleri görüntüleme
Aşağıdaki girdilerin açıklaması için bkz . Sınıf özelliklerini görüntüleme
| Characteristic | Açıklama |
|---|---|
| Aralık bağdaştırıcısı | views::filter |
| Temel alınan aralık | Veya üzerini karşılaması input_range gerekir |
| Öğe türü | Temel alınan aralıkla aynı |
| Yineleyici kategoriyi görüntüleme | input_range, forward_rangeveya bidirectional_range temel alınan aralığa bağlı olarak |
| Boyutlu | Hayır |
- constyinelenebilir |
Hayır |
| Ortak aralık | Yalnızca temel alınan aralık karşılanırsa common_range |
| Ödünç alınan aralık | Yalnızca temel alınan aralık karşılanırsa borrowed_range |
Üyeler
| Üye işlevleri | Açıklama |
|---|---|
| OluşturucularC++20 | Görünümü oluşturma. |
baseC++20 |
Temel alınan aralığı alın. |
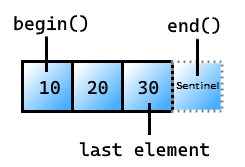
beginC++20 |
İlk öğeye bir yineleyici alın. |
endC++20 |
Görünümün sonunda sentinel'i alın. |
predC++20 |
Hangi öğelerin bırakıldığını belirleyen koşula bir başvuru alın. |
| view_interface devralındı | Açıklama |
backC++20 |
Son öğeyi alın. |
emptyC++20 |
Görünümün boş olup olmadığını test edin. |
frontC++20 |
İlk öğeyi alın. |
operator boolC++20 |
Görünümün boş olup olmadığını test edin. |
Gereksinimler
Üst bilgi: <ranges> (C++20'den beri)
Ad alanı: std::ranges
Derleyici Seçeneği: /std:c++20 veya üzeri gereklidir.
Oluşturucular
Bir örneğini oluşturma filter_view
1) constexpr filter_view(V base, P pred);
2) filter_view() requires default_initializable<V> && default_initializable<Pred> = default;
Parametreler
base
Temel alınan görünüm.
pred
Temel alınan görünümden hangi öğelerin tutulduğunu belirleyen koşul.
Şablon parametre türleri hakkında bilgi için bkz . Şablon parametreleri.
Dönüş değeri
Bir filter_view örnek.
Açıklamalar
Oluşturmanın filter_view en iyi yolu, aralık bağdaştırıcısını views::filter kullanmaktır. Aralık bağdaştırıcıları, görünüm sınıfları oluşturmanın amaçlanan yoludur. Kendi özel görünüm türünüzü oluşturmak istemeniz durumunda görünüm türleri kullanıma sunulur.
1) Değer tarafından filter_viewbaşlatılan bir oluşturun. Koşul ve temel alınan görünüm varsayılan olarak başlatılabilir olmalıdır.
2) Bir görünümden ve koşuldan base pred öğesini filter_view taşır. hem hem de base pred aracılığıyla std::move()taşınır.
Örnek: filter_view
// requires /std:c++20 or later
#include <ranges>
#include <iostream>
#include <vector>
void print(auto v)
{
for (auto& x : v)
{
std::cout << x << ' ';
}
std::cout << '\n';
}
int main()
{
std::vector<int> v{0, 1, -2, 3, -4, -5, 6};
auto myView = std::views::filter(v, [](int i) {return i > 0; });
print(myView); // outputs 1 3 6
auto myView2 = v | std::views::filter([](int i) {return i < 3; });
print(myView2); // outputs 0 1 -2 -4 -5
}
1 3 6
0 1 -2 -4 -5
base
Temel alınan aralığı alır.
// Uses a copy constructor to return the underlying range
constexpr V base() const& requires std::copy_constructible<V>;
// Uses std::move() to return the underlying range
constexpr V base() &&;
Parametreler
Hiçbiri.
Döndürülenler
Temel alınan görünüm.
begin
Görünümdeki ilk öğeye bir yineleyici alın.
constexpr auto begin();
Dönüş değeri
Görünümdeki ilk öğeye işaret eden bir yineleyici. Görünümün bir koşulu yoksa davranış tanımlanmamıştır.
end
Görünümün sonunda sentinel'i alın.
constexpr auto end()
Dönüş değeri
Görünümdeki son öğeyi izleyen sentinel:
pred
Hangi öncü öğelerin bırakıldığını belirleyen koşula bir başvuru alın.
constexpr const Pred& pred() const;
Dönüş değeri
Koşula bir başvuru.
Açıklamalar
Sınıf bir koşulu depolamıyorsa, davranış tanımsız olur.
Örnek pred
// requires /std:c++20 or later
#include <ranges>
#include <iostream>
#include <vector>
int main()
{
std::vector<int> v{0, 1, 2, 3, -4, 5, 6};
auto mv = v | std::views::filter(
[](int i) {return i < 5; }); // keep the elements < 5
std::cout << std::boolalpha << mv.pred()(v[6]); // outputs "false" because v[6] = 6 and 6 is not less than 5 (the predicate)
}
Ayrıca bkz.
<ranges>
filter aralık bağdaştırıcısı
drop_while()
take_while()
sınıfları görüntüleme