Not
Bu sayfaya erişim yetkilendirme gerektiriyor. Oturum açmayı veya dizinleri değiştirmeyi deneyebilirsiniz.
Bu sayfaya erişim yetkilendirme gerektiriyor. Dizinleri değiştirmeyi deneyebilirsiniz.
Bu bölümde, Windows füzyon algılayıcısı sürücü yığını hakkında uygulama ayrıntıları sağlanır.
Uyarı
Microsoft bazı platformlarda füzyon sürücüsü ikili dosyaları sağlar ve bunlar iş ortakları tarafından değiştirilemez.
Aşağıdaki diyagramda algılayıcı füzyon yazılım yığını gösterilmektedir.
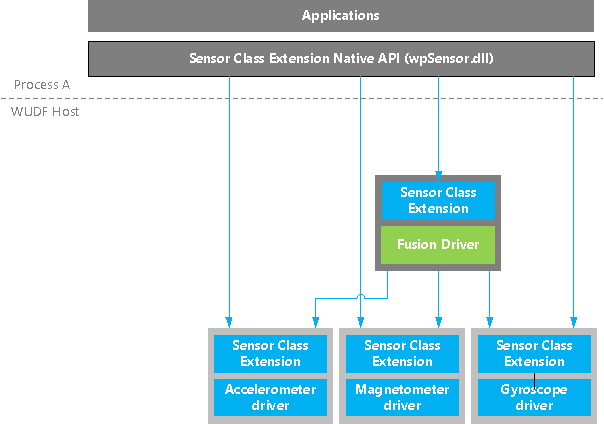
Fusion yazılım yığını aşağıdaki bileşenlerden oluşur:
- Algılayıcının yerel API'leri, füzyon ve pusula özelliklerine ve işlevlerine erişmek için uygulamalar tarafından çağrılır. API'ler ReadFile ve DeviceIoControl sarmalayıcılarıdır. Bu API'ler algılayıcı sınıfı uzantısına gönderilir ve bu uzantı isteği işler ve tamamlar.
- Sensör sınıfı uzantısı, gerekli sensöre özgü genişletilebilirlik için destek sağlar.
- Fusion sürücüsü, sürücünün işleve özgü yazılım bölümüdür. Fiziksel algılayıcıları okur ve verileri işler. Pusula ve füzyon sensörü algoritması bu bileşende uygulanır.
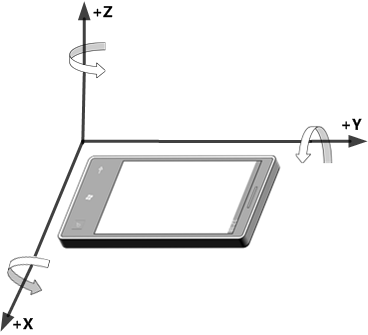
Koordinat sistemleri
Aşağıdaki diyagramda gösterilen koordinat sistemi tüm fiziksel algılayıcılar ve füzyon verileri için kullanılır.
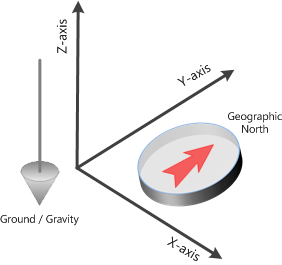
Aşağıdaki diyagramda gösterilen koordinat sistemi, füzyon algoritması ve API'ler tarafından Dünya/yer referansı çerçevesindeki tüm vektörler için kullanılan kuraldır.
Veri yapıları
Mantıksal algılayıcı sürücüsünün fusion veri bölümü tarafından aşağıdaki yapılar ve numaralandırmalar kullanılır:
Fusion algılayıcı numaralandırmaları ve Fusion algılayıcı yapıları , tutum (birden çok biçimde) ve doğrusal hızlandırma ile pusula verilerini içeren sensör füzyon veri yapısının tamamı hakkında bilgi sağlar.