延迟 - 平移(触摸板延迟-平移)
这是为了测试 Windows 精确式触摸板设备在延迟和平移方面的报告功能。
测试名称
- Test.StepMotor.json
测试的核心要求
- Device.Input.Digitizer.PrecisionTouchpad.Latency
测试目的
- 验证设备是否能够在所需延迟时间范围内报告触点位置的更改。
需要的工具
包含精确式触摸板修改的 RA 工具。 有关 RA 工具的供应商信息,请参阅硬件要求和供应商信息。
ptstepmotor.exe。
验证步骤
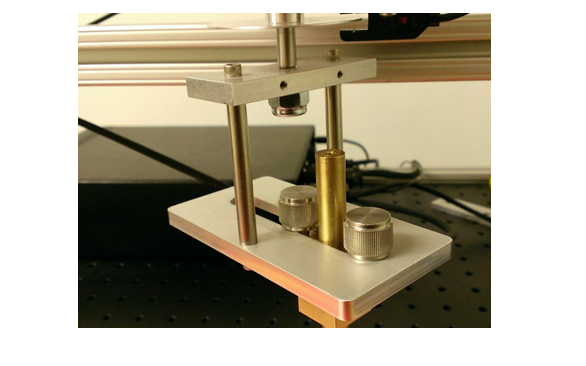
- 请确保 RA 工具使用较小的可调整 PTP 支架进行固定,如下图所示。
- 将 RA 工具控制器插入测试计算机,然后打开控制器。 请注意,如果未按正确顺序执行此步骤中的任务,则控制器可能会最终处于未定义状态。
控制器上的开关最初应按如下所示进行设置:
a. Motor(电机):Off(关闭)b. Calibrate(校准):Off(关闭)c. Mode(模式):Tachometer(转速表)3. 将圆的半径调整到 12 毫米并定位 PTP 设备,以便触点在其完全旋转期间保持在数字化仪表面上。
- 旋转臂,直到圆盘上的凹口超过传感器 2-3 毫米。
a. 如果离传感器太近,你将在测试开始时获得一个额外的数据点。 这是因为电机在启动时将向后旋转。 如果在此期间缺口落在传感器下方,则会导致错误的数据。
b. 如果离传感器太远,计数似乎以 2 递增,而不是两次递增 1。 电机经过校准,可围绕其旋转并缓慢通过相对于其开始位置的圆的某个部分,并且预计该慢部分将通过传感器下方。 但如果开始时离传感器太远,当凹口通过传感器下方时,臂仍然会移动得太快。
运行 ptstepmotor.exe。
将触点降低到触摸板表面上。
按下测试计算机上的空格键并将电机开关拨到打开以开始校准阶段。
旋转 9 圈后(屏幕上的计数等于 17),电机将完全停止 5 秒。 在这 5 秒内按空格键进入采集阶段。
等待臂旋转 10 圈,然后按空格键进入收集阶段。
在收集阶段,臂旋转 10 圈后,最后按一次空格键关闭测试。
请注意,除非出现错误,否则请勿按 Esc 退出。如果在没有错误时按 Esc 退出,则测试可能无法完成。
有关更多详细设置和测试说明,请参阅如何测量触摸平移延迟。
常见错误
在校准阶段开始时,如果源盘上的凹槽太靠近光电断路器信号,则在臂旋转一次之前,将出现校准文本,且计数为零 (0)。
确保将插槽定位在超过光电断路器信号 2-3 毫米处。
当校准正确执行时,每旋转一圈,计数应增加 2:在命中光电断路器信号之前和之后加 1。
o 因此,采集阶段开始之前的暂停总是发生在计数 = 17 时
o 如果计数没有正确增加,请中止测试。 关闭控制器,断开控制器与测试计算机的 USB 连接然后重新插入,然后再次开启控制器。 从头开始测试,并验证计数是否正确递增。
在校准阶段结束时,电机将完全暂停 5 秒。 在暂停期间,必须按空格键才能进入采集阶段,否则将显示错误消息。
通过标准
- 如果测试记录的平均平移延迟小于或等于 70.0 毫秒,则测试会通过。