求解器概述 - MRTK2
求解器是有助于根据预定义算法计算对象位置和方向的组件。 例如,将对象放置在用户当前注视视线直达的表面上。
此外,求解器系统确定性地定义这些转换计算的运算顺序,因为没有可靠的方法向 Unity 指定组件的更新顺序。
求解器提供一系列行为,以将对象附加到其他对象或系统。 另一个示例是一个尾随对象,该对象悬停在用户前面(基于摄像机)。 求解器还可以附加到控制器和对象,使对象尾随控制器。 所有求解器都可以安全地堆叠,例如尾随行为 + 表面磁性 + 动量。
如何使用求解器
求解器系统由三类脚本组成:
Solver:基本抽象类,用于派生所有求解器。 它提供状态跟踪、平滑参数和实现、自动求解器系统集成和更新顺序。SolverHandler:设置跟踪所参照的对象(例如:主摄像头转换、手部射线等),处理求解器组件收集以及按正确顺序执行更新。
第三个类别是求解器本身。 以下求解器提供基本行为的构建基块:
Orbital:锁定到指定位置并偏离参照对象。ConstantViewSize:缩放以保持相对于参照对象视图不变的大小。RadialView:使对象保持在参照对象的视锥投射范围内。Follow:使对象保持在参照对象的一组用户定义边界内。InBetween:使对象保持在两个跟踪对象之间。SurfaceMagnetism:将射线投射到世界中的表面上,并使对象对齐到该表面。DirectionalIndicator:确定作为方向指示器的对象的位置和方向。 从 SolverHandler 跟踪目标的参照点来看,此指示器将面向提供的 DirectionalTarget。Momentum:应用加速/速度/摩擦来模拟由其他求解器/组件移动的对象的动量和弹性。HandConstraint:约束对象,使其在 GameObject 不会与手部交叉的区域跟随手部。 对手部约束的交互式内容很有用,如菜单等。此求解器旨在与 IMixedRealityHand 一起使用,但也可以与 IMixedRealityController 一起使用。HandConstraintPalmUp:派生自 HandConstraint,但包含用于测试手部在激活前是否手掌面向用户的逻辑。 此求解器只能与 IMixedRealityHand 控制器一起使用,如果与其他控制器类型一起使用,此求解器的行为类似于基类。
要使用求解器系统,只需将上面所列任一组件添加到 GameObject 即可。 由于所有求解器都需要 SolverHandler,因此 Unity 会自动创建一个。
注意
SolverExamples.scene 文件中介绍了如何使用求解器系统的示例。
如何更改跟踪参照
SolverHandler 组件的“跟踪目标类型”属性定义所有求解器将用于计算其算法的参考点。 例如,具有简单 SurfaceMagnetism 组件的 Head 值类型将产生从头部开始,沿着用户凝视方向发射出去的射线,用于求解射线到达的表面。 TrackedTargetType 属性的可能值包括:
- Hea:参照点是主摄像头的转换
- ControllerRay:参考点是控制器上指向射线方向的
LinePointer转换(即运动控制器或手操控制器上的指针原点)- 使用
TrackedHandedness属性选择惯用手偏好(即左手和/或右手)
- 使用
- HandJoint:参照点是特定手部关节的转换
- 使用
TrackedHandedness属性选择惯用手偏好(即左手和/或右手) - 使用
TrackedHandJoint属性确定要利用的联接转换
- 使用
- CustomOverride:参照点来自于已分配的
TransformOverride
注意
对于 ControllerRay 和 HandJoint 类型,求解器处理程序将先尝试提供左侧控制器/手部转换,然后在前者不可用时提供右侧转换,或者除非 TrackedHandedness 属性另有指定。
 与每个 TrackedTargetType 关联的各种属性的示例
与每个 TrackedTargetType 关联的各种属性的示例
重要
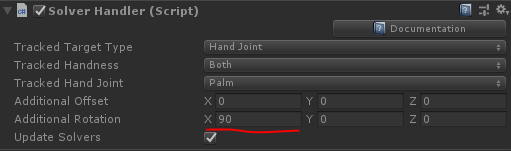
大多数求解器使用 SolverHandler 提供的跟踪转换目标的前向向量。 使用“手部关节”跟踪目标类型时,手掌关节的前向向量可能会穿过手指,而非手掌。 这取决于提供手部关节数据的平台。 对于输入模拟和 Windows Mixed Reality,穿过手掌指向上方的是“向上向量”(即绿向量向上,蓝向量向前)。
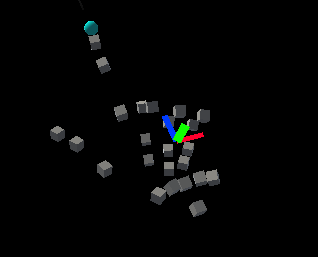
若要克服这个问题,可以将 SolverHandler 上的“附加转动”属性更新为 <90, 0, 0>。 这将确保提供给求解器的前向向量穿过手掌,从手部向外指出去。
或者,使用“控制器射线”跟踪目标类型获取与手部指向相似的行为。
如何链接求解器
您可以将多个 Solver 组件添加到同一 GameObject 来链接算法。 SolverHandler 组件负责更新同一 GameObject 上的所有求解器。 默认情况下,SolverHandler 会在 Start 上调用 GetComponents<Solver>(),从而按求解器在检查器中显示的顺序返回求解器。
此外,将“更新的链接转换”属性设置为 true,会指示 Solver 将其计算的位置、方向和缩放保存到所有求解器都可以访问的中间变量(即 GoalPosition)。 如果为 false,Solver 将直接更新 GameObject 的转换。 通过将转换属性保存至中间位置,其他求解器能够从中间变量开始执行其计算。 这是因为 Unity 不允许对 gameObject.transform 的更新在同一帧中堆叠。
注意
开发人员可以通过直接设置 SolverHandler.Solvers 属性来修改求解器的执行顺序。
如何创建新的求解器
所有求解器都必须继承自抽象基类 Solver。 求解器扩展的主要要求涉及重写 SolverUpdate 方法。 在此方法中,开发人员应将继承的 GoalPosition、GoalRotation 和 GoalScale 属性更新为所需值。 此外,将 SolverHandler.TransformTarget 用作使用者所需的参照帧通常十分有益。
下面提供的代码提供了名为 InFront 的新求解器组件的示例,该组件将附加对象放在 SolverHandler.TransformTarget 前面 2 米处。 如果使用者将 SolverHandler.TrackedTargetType 设置为 Head,则 SolverHandler.TransformTarget 将是相机转换,因此该求解器会在每一帧将附加的 GameObject 放在用户凝视的前面的 2 米处。
/// <summary>
/// InFront solver positions an object 2m in front of the tracked transform target
/// </summary>
public class InFront : Solver
{
...
public override void SolverUpdate()
{
if (SolverHandler != null && SolverHandler.TransformTarget != null)
{
var target = SolverHandler.TransformTarget;
GoalPosition = target.position + target.forward * 2.0f;
}
}
}
求解器实现指南
常见求解器属性
每个求解器组件都有一组核心属性,这些属性是相同的,用于控制求解器行为。
如果启用了“平滑处理”,则求解器将随着时间的推移,将 GameObject 的转换逐渐更新为计算值。 此更改的速度取决于每个转换组件的“LerpTime”属性。 例如,MoveLerpTime 值越高,帧之间的移动增量就会越慢。
如果启用了 MaintainScale,求解器将利用 GameObject 的默认本地缩放。
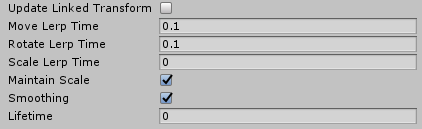
所有求解器组件都会继承的常见属性
Orbital
Orbital 类是一个尾随组件,其行为类似于太阳系中的行星。 此求解器将确保附加的 GameObject 围绕着跟踪转换旋转。 因此,如果 SolverHandler 的“跟踪目标类型”设置为 Head,则 GameObject 将按照所应用的固定偏移量,围绕用户的头部旋转。
开发人员可以修改此固定偏移量,以使菜单或其他场景组件保持在眼睛或腰部的高度,围绕在用户周围。 这可以通过修改“本地偏移量”和“全局偏移量”属性完成。 “方向类型”属性确定应用于对象的旋转,例如,对象应始终保持原始旋转,或者总是面向摄像头,或者面向驱动其位置的转换,等等。
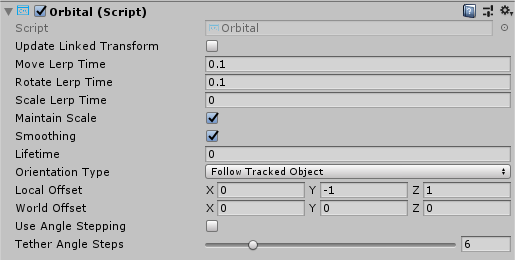
Orbital 示例
RadialView
RadialView 是另一个尾随组件,用于使 GameObject 的特定部分保持在用户视野的圆锥体内。
“最小和最大视场角度”属性决定了 GameObject 必须始终在视线范围内的部分的面积。
“最小和最大距离”属性决定了 GameObject 应该与用户保持多远距离。 例如,如果“最小距离”为 1 米,走向 GameObject 会将 GameObject 推开,以确保它永远不会距离用户短于 1 米。
通常,RadialView 会与设置为 Head 的跟踪目标类型一起使用,这样组件就会跟随用户的凝视。 但是,此组件可以发挥作用,以保持在任何跟踪目标类型的“视线”范围内。
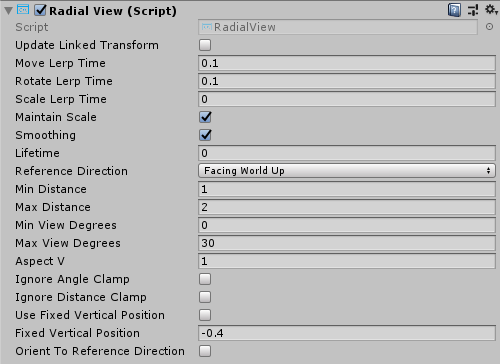
RadialView 示例
关注
Follow 类将元素定位在跟踪目标的前面,相对于其局部前向轴。 该元素可以是松散约束型(又称尾随),这可以确保在跟踪目标移动到用户定义的边界之外之前它不会跟随。
它的工作方式类似于 RadialView 求解器,但具有更多控制,可以管理“最大水平和垂直视场角度”,此外还有用于更改对象“方向”的机制。
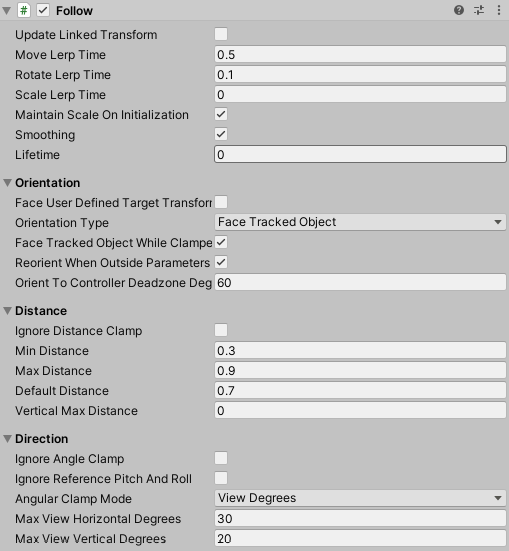
Follow 属性

Follow 示例场景 (Assets/MRTK/Examples/Demos/Solvers/Scenes/FollowSolverExample.unity)
InBetween
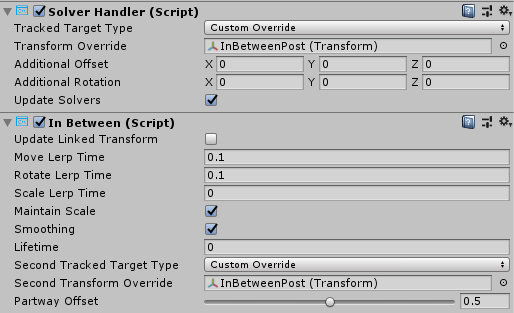
InBetween 类使附加的 GameObject 保持在两个转换之间。 这两个转换终结点由 GameObject 自己的 SolverHandler跟踪目标类型和 InBetween 组件的“第二个跟踪目标类型”属性定义。 通常,这两个类型都将设置为 CustomOverride,产生的 SolverHandler.TransformOverride 和 InBetween.SecondTransformOverride 值将设置为两个跟踪的终结点。
在运行时,InBetween 组件将基于“第二个跟踪目标类型”和“第二个转换覆盖”属性再创建一个 SolverHandler 组件。
PartwayOffset 定义应在直线上两个转换之间的哪个位置放置对象,0.5 表示中间,1.0 表示第一个转换,0.0 表示第二个转换。
使用 InBetween 求解器使对象保持在两个转换之间的示例
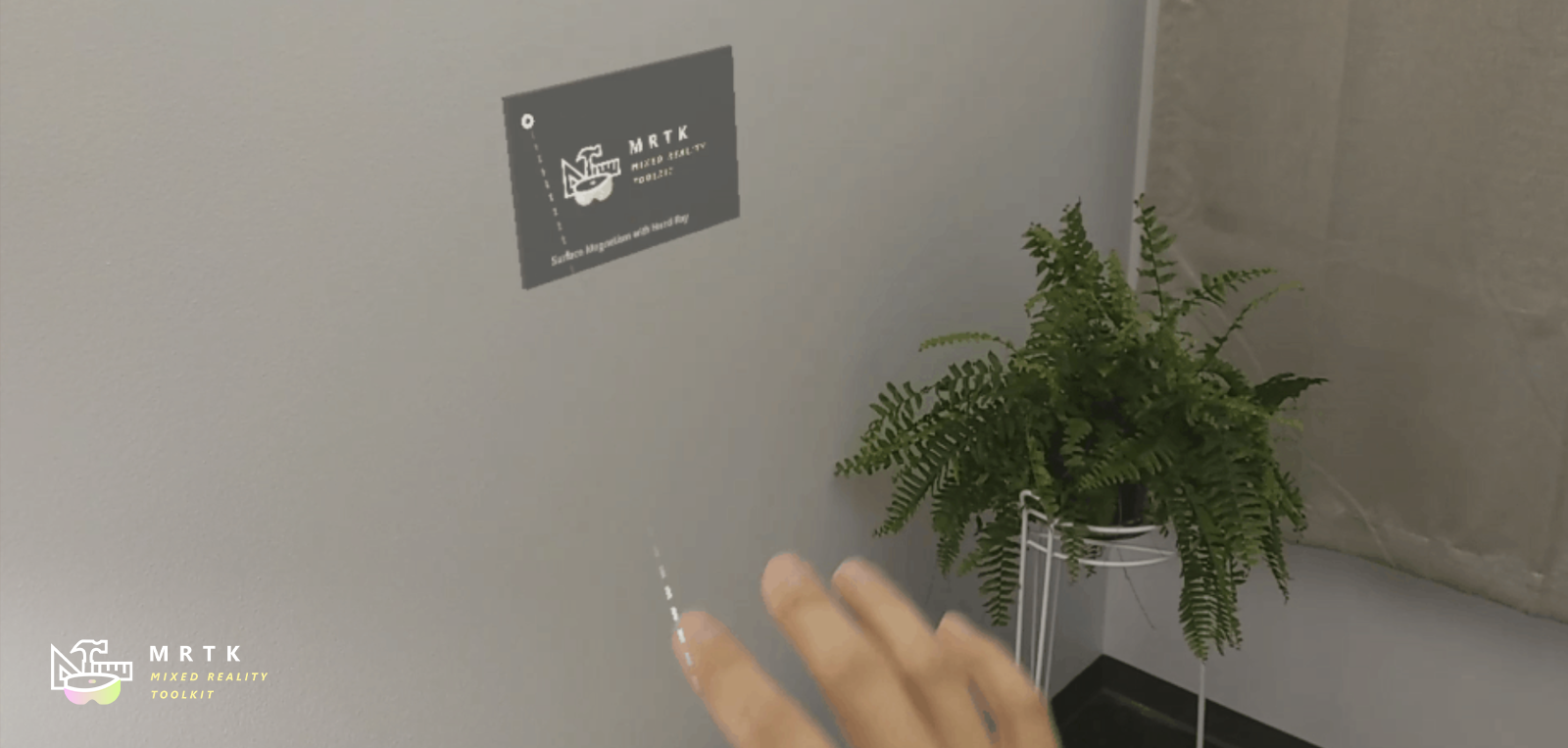
SurfaceMagnetism
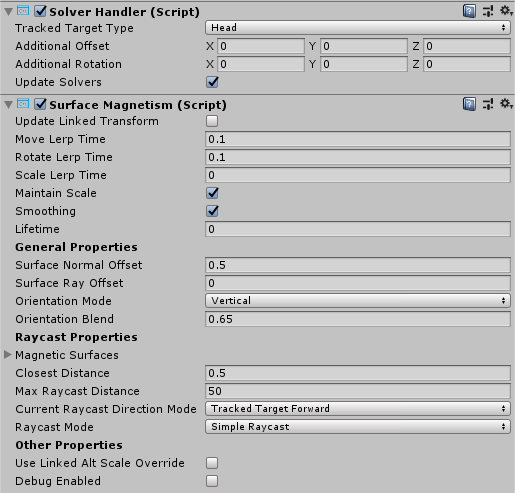
SurfaceMagnetism 的工作方式是对一组表面的 LayerMask 执行光线投射,并将 GameObject 放置在接触点。
“表面垂直偏移”按照设定好的距离表面的距离(米),沿着表面上击中点处的法线方向放置 GameObject。
相反,“表面射线偏移”按照设定好的距离表面的距离(米),沿着所执行光线投射的相反方向放置 GameObject。 因此,如果光线投射是用户凝视的方向,则 GameObject 将沿直线从表面上的击中点向摄像头靠近。
“方向模式”确定相对于表面上的法线应用的旋转类型。
- 无 - 不应用旋转
- 跟踪目标 - 对象将面向驱动光线投射的跟踪转换
- 表面法线 - 对象将基于表面上的击中点对齐
- 混合 - 对象将基于表面上的击中点对齐,并且面向跟踪转换。
要强制关联的 GameObject 在除“无”以外的任何模式下都保持垂直,请启用“使方向保持垂直”。
注意
当“方向模式”设置为“混合”时,使用“方向混合”属性控制旋转因子之间的平衡。 如果值为 0.0,则方向完全由“跟踪目标”模式驱动,值为 1.0 时,方向完全由“表面法线”驱动。
确定可以击中的表面
将 SurfaceMagnetism 组件添加到 GameObject 时,必须考虑 GameObject 及其子代的层(如果任何子代有碰撞器)。 该组件的工作方式是执行各种类型的光线投射,以确定哪些表面可以“吸附”光线。 如果求解器 GameObject 在 SurfaceMagnetism 的 MagneticSurfaces 属性所列的其中一个层上有碰撞器,那么光线投射很可能会击中自己,导致 GameObject 附加到其自己的碰撞器点。 这种异常行为是可以避免的,方法是将主 GameObject 和所有子代设置为“忽略光线投射”层或相应地修改 MagneticSurfaces LayerMask 数组。
相反,SurfaceMagnetism GameObject 不会与 MagneticSurfaces 属性中未列出的层上的表面发生碰撞。 通常建议将所有需要的表面放在专用层(即图面)上,并将 MagneticSurfaces 属性设置为仅此层。 使用“默认”或“全部”可能会导致 UI 组件或光标影响求解器。
最后,SurfaceMagnetism 光线投射将忽略 MaxRaycastDistance 属性设置,而不是表面。
DirectionalIndicator
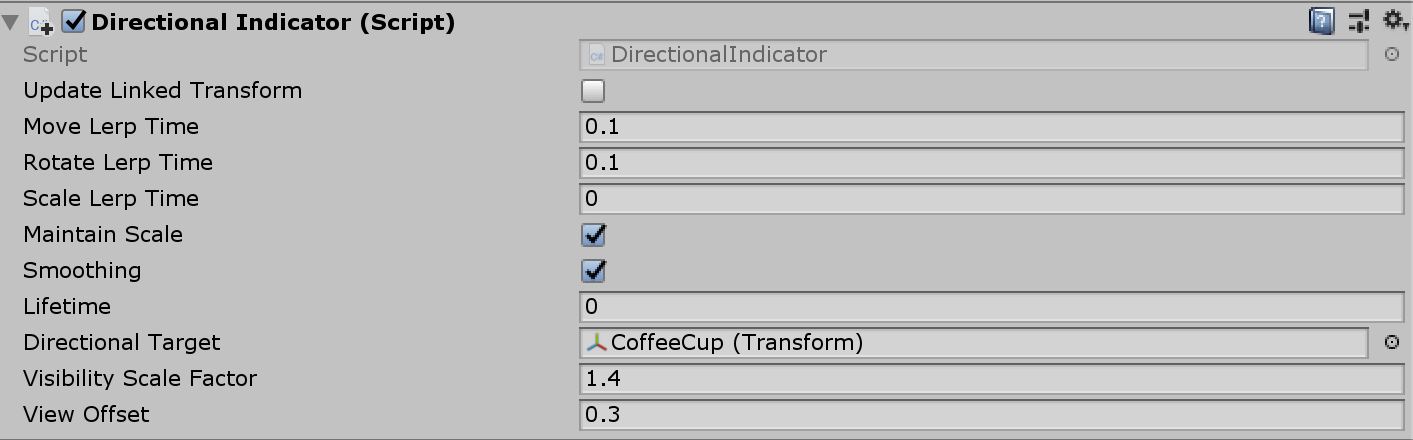
DirectionalIndicator 类是一个尾随组件,它可以根据空间中指定点的方向调整自身方向。
最常用于 SolverHandler 的“跟踪目标类型”设置为 Head 的情况。 这样,具有 DirectionalIndicator 求解器的 UX 组件将指引用户看空间中的指定点。
空间中的指定点通过“方向目标”属性确定。
如果用户可以查看方向目标,或在 SolverHandler 中设置了任何参照帧,则该求解器将禁用它下面的所有 Renderer 组件。 如果不可查看,则该指示器上将启用所有内容。
随着用户逐渐靠近以在他们的 FOV 中捕捉“方向目标”,指示器的大小将缩小。
最小指示器比例 - 指示器对象的最小比例
最大指示器比例 - 指示器对象的最大比例
可见性比例因子 - 用于增加或减少 FOV 的乘数,用于确定“方向目标”点是否可见
视角偏移 - 从参考系(可能是相机)的角度来看,该属性定义对象应在指示器方向上距视区中心多远。
Directional Indicator 属性
DirectionalIndicator 示例场景 (Assets/MRTK/Examples/Demos/Solvers/Scenes/DirectionalIndicatorSolverExample.unity)
带有 HandConstraint 和 HandConstraintPalmUp 的手部菜单
HandConstraint 行为提供了一个求解器,该求解器将跟踪对象约束在确保可显示手部约束内容(如手部 UI、菜单等)的区域内。 安全区域是指不会与手部相交的区域。 还包含了一个名为 HandConstraintPalmUp 的 HandConstraint 派生类,用于演示手掌朝向用户时激活求解器的常见行为。
另请参阅“手部菜单”页面,了解使用手部约束求解器创建手部菜单的示例。