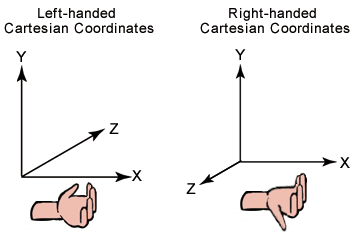
通常,3D 图形应用程序使用两种类型的笛卡尔坐标系统之一:左手坐标系统或右手坐标系统。 在这两个坐标系统中,正 x 轴指向右侧,正 y 轴指向上方。
左手坐标和右手坐标
通过将你的左手或右手手指指向正 x 方向,然后弯曲手指,将其指向正 y 方向,你可以记住正 z 轴指向的方向。 你的拇指指向的方向(无论指向你还是相反方向)就是正 z 轴为坐标系统所指的方向。 下面的图例显示了这两个坐标系统。
Direct3D 使用左手坐标系统。 尽管左手和右手坐标是最常用的系统,但是 3D 软件中还会使用多种其他坐标系统。 例如,3D 建模应用程序使用坐标系统并不少见,其中,y 轴指向查看器或相反方向,且 z 轴指向上方。
顶点和矢量
鉴于坐标系统,x、y 和 z 坐标可以定义空间(“顶点”)或 3D 方向(“矢量”)中的点。
顶点集合可用于定义直线和图形。 顶点可定义的最简单的对象称为基元,由一组基元定义的较复杂的对象称为“网格”。
在 3D 坐标系统中定义的网格上执行的必要操作是转换、旋转和缩放。 你可以组合这些基本转换以创建转换矩阵。 有关详细信息,请参阅转换。
组合这些操作时,结果不可交换;你乘以矩阵的顺序很重要。
从右手坐标系统移植
如果移植基于右手坐标系统的应用程序,你必须对传递到 Direct3D 的数据进行两项更改:
- 调换三角形顶点的顺序以便系统从前面按顺时针方向遍历它们。 换言之,如果顶点是 v0、v1、v2,则以 v0、v2、v1 将它们传递到 Direct3D。
- 使用视图矩阵在 z 方向将世界空间缩放 -1。 若要执行此操作,请翻转用于视图矩阵的矩阵结构的 _31、_32、_33 和 _34 成员的符号。
相关主题