Azure Kinect 檢視器
在已安裝工具目錄下名叫 k4aviewer.exe 的 Azure Kinect 檢視器(例如,C:\Program Files\Azure Kinect SDK vX.Y.Z\tools\k4aviewer.exe,其中 X.Y.Z 是已安裝的 SDK 版本)可以將所有設備資料流視覺化,以便:
- 確認感應器有正常運作。
- 協助定位裝置。
- 測試相機設定。
- 讀取裝置設定。
- Azure Kinect 錄製器所製作的播放錄製內容。
如需 Azure Kinect 檢視器的詳細資訊,請觀看如何使用 Azure Kinect 影片。
Azure Kinect 檢視器開放原始碼,可作為 API 使用方式的範例。
使用檢視器
檢視器可以用兩種模式運作:使用來自感應器的即時資料,或者使用錄製的資料 (Azure Kinect 錄製器)。
啟動應用程式
執行 k4aviewer.exe 以啟動應用程式。
以即時資料使用檢視器
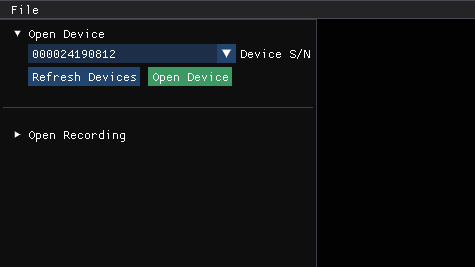
- 在 [開啟裝置] 區段中,選取要開啟之裝置的 [序號]。 接著,如果裝置遺失的話,請選取 [重新整理]。
- 選取 [開啟裝置] 按鈕。
- 選取 [開始] 以利用預設設定開始串流資料。
以錄製資料使用檢視器
在 [開啟錄製] 區段中,瀏覽至錄製的檔案並選取之。
檢查裝置韌體版本
存取設定視窗中的裝置韌體版本,如下圖所示。
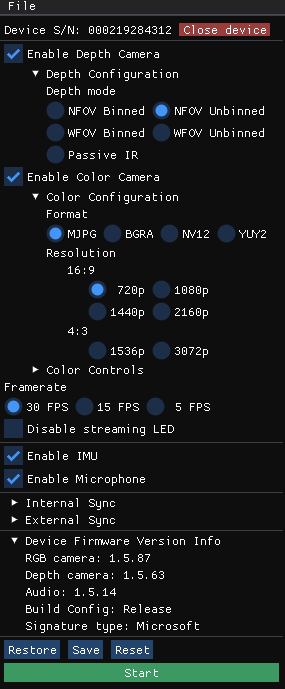
例如,在此範例中,深度相機 ISP 正在執行 FW 1.5.63。
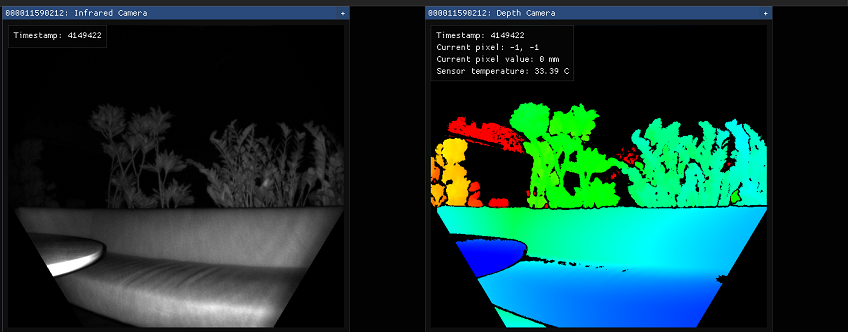
深度相機
深度相機檢視器會顯示兩個視窗:
- 其中一個稱為 [動態亮度],是顯示 IR 亮度的灰階影像。
- 第二個稱為 [深度],具有以顏色表示的深度資料。
將游標停留在深度視窗的像素上以查看深度感應器的值,如下所示。
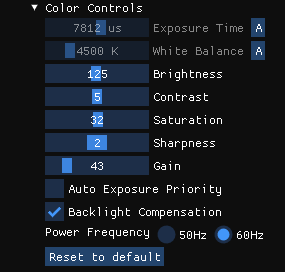
RGB 相機
下圖為彩色相機的檢閱視窗。

您可以在串流期間透過設定視窗控制 RGB 相機設定。
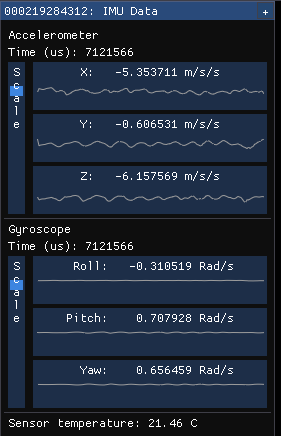
慣性測量單位 (IMU)
IMU 視窗有兩個元件:加速計和陀螺儀。
上半部為加速計,以公尺/秒 2 為單位顯示線性加速。 它包含重力加速度,因此如果它位於桌上,Z 軸可能會顯示 -9.8 公尺/秒 2 左右的值。
下半部為陀螺儀,以弧度/秒為單位顯示轉動
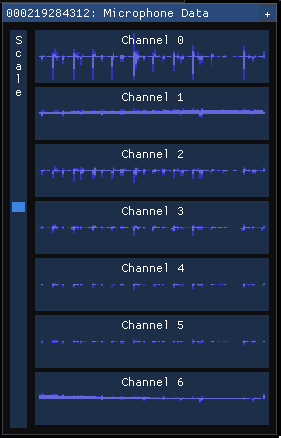
麥克風輸入
麥克風檢閱視窗會顯示代表各麥克風所收到之聲音的表示圖。 如果沒有聲音,該圖會是空白的。如果有聲音,您會看到一個深藍色的波型,而其上方有一個淺藍色的波型。
深色的波代表麥克風在該時間配量所觀測到的最小值和最大值。 淺色的波則代表麥克風在該時間配量所觀測到均方根值。
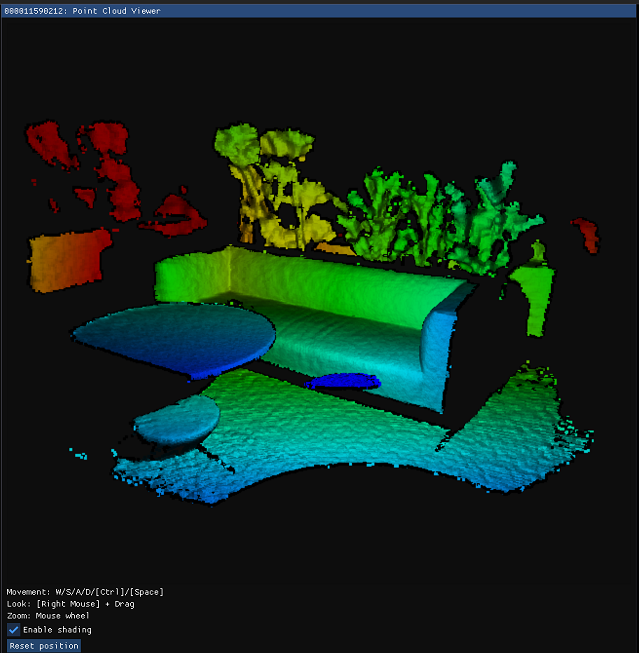
點雲端視覺化
以 3D 呈現的深度可幫助您利用指示的按鍵在影像中移動。
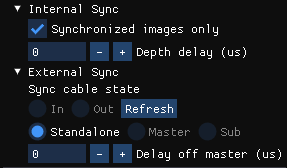
同步處理控制項
在設定多裝置同步處理時,您可使用檢視器將裝置設定為獨立 (預設)、主要或從屬模式。 在變更設定或插入/移除同步纜線時,請選取 [重新整理] 以進行更新。