Windows 10 軟式即時是一項新功能,Windows 10 IoT 企業版 21H2,可讓裝置製造商在其裝置上引進軟即時功能。
此即時行為會透過 4 個關鍵設定引入:
CPU 隔離:從隔離 CPU 移轉系統層級干擾,減少使用者即時應用程式的潛在抖動
隔離 CPU 上的自定義 ISR/DPC 釘選:所有硬體中斷都會路由傳送至系統和非即時核心,但藉由撰寫自定義 ISR/DPC 驅動程式,您可以將裝置特定的中斷路由至即時核心。
mutex 的優先順序繼承:此設定可確保執行最高優先順序的線程,即使在複雜的多線程案例中也是如此。
最多 16 個 RT 線程優先順序層級:這可讓程式設計人員在即時工作之間分割資源,以確保會先執行最重要的資源。
什麼是 Real-Time 作業系統?
執行程式時,一般作系統會提供決定性的結果,但允許不具決定性的時間完成工作。 在即時作系統中,程式執行的結果和取得這些結果所花費的時間都是具決定性的。。
硬式 Real-Time 與軟式 Real-Time
硬實時操作系統是指時間的花費在一個確定的時刻是可預測的。 這些操作系統會部署在一些案例中,如果無法及時獲得結果,這將被視為整個系統的失敗。 範例包括汽車引擎或飛機內的微型控制器、印表機、鐳射切割機等。Azure Real-Time OS 是這類 OS 的範例。
軟即時作業系統是指程式完成時有一小段時間窗口,而不是精確到某個時刻,這是由於作業系統的一些抖動所致。 軟即時系統雖然較不精確,但可以在多個核心上執行,並對應用程式施加較少的限制。 這是使用本指南之後,您可以從 Windows 10 IoT 企業版預期的即時效能類型。
何時需要 Real-Time 效能?
即時效能不一定更快。 這隻是可預測的效能。 如果您想要更好的整體系統效能 – 軟即時處理可能不是理想的選擇。 不過,如果您有現實世界的限制條件(例如,必須在機器人環境變更之前進行的計算,或必須在輸送帶開始移動之前啟動的馬達),那麼軟性即時可能是您需要的。
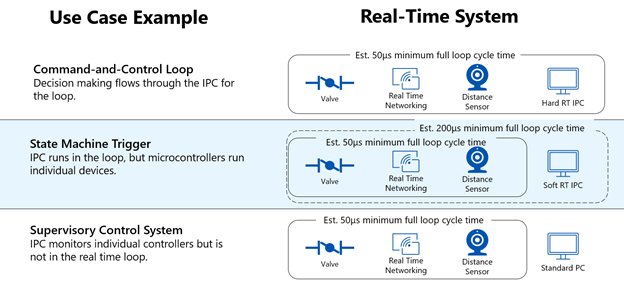
軟式即時裝置在更廣泛的控制迴圈中較常使用,以觸發狀態機器的行為。 較小的硬式即時控制迴圈位於較大的迴圈內,並在獨立的微控制器上運作,直到軟式即時機器提供輸入以改變其行為為止。 許多命令和控制迴圈都有艱苦的循環時間需求,而且需要在迴圈中使用硬式即時裝置進行直接控制。