透過 MRTK 的輸入模擬,你可以在 Unity 編輯器中測試各種互動,而不必直接建置並部署到裝置上。 輸入模擬讓你能在設計與開發過程中快速迭代想法。 使用鍵盤和滑鼠組合來控制模擬輸入。
輸入模擬服務模擬 Unity 編輯器中可能無法提供的裝置與平台行為。 範例包含:
- HoloLens 或 VR 裝置的頭部追蹤
- HoloLens 的手勢
- HoloLens 2 關節式手部追蹤
- HoloLens 2 眼動追蹤
警告
使用 Unity 的 XR 全息模擬 > 模式 = 「在編輯器中模擬」時,輸入模擬無法運作。Unity 的編輯器內模擬將剝奪 MRTK 輸入模擬的控制權。 要使用 MRTK 的輸入模擬,你需要將 XR 全息模擬設定為:
模擬模式 = 「無」。
在為場景新增輸入模擬前,請確保你已在 MRTK3 的專案設定中啟用「手部合成子系統」。 欲了解更多關於配置 MRTK3 設定的資訊,請參閱 子系統 — MRTK3。 若未啟用「手部合成子系統」,MRTK3 的手部模擬將無法運作。
接著,把 加入 MRTKInputSimulator 你的場景。 此預製件將透過輸入模擬器元件實現 MRTK3 的輸入模擬。 此元件使用 Unity Input System 的 Input Action 資產來定義用於移動模擬器攝影機、眼神凝視與手部的按鍵綁定。 MRTK3 的輸入模擬器預製器規範了預設按鍵綁定,詳見 《如何使用 MRTK3 輸入模擬》。 這些按鍵綁定會在預設的輸入動作資產中配置,該資產 MRTKInputSimulatorControl包含兩個控制方案, (或控制集) 。 一組控制組使用舊版 MRTK2 按鍵綁定,另一組則使用較新的 MRTK3 按鍵綁定。 預設情況下 MRTKInputSimulator ,預製件使用 MRTK3 控制集,但可透過設定模擬器屬性 Control Set 來調整。
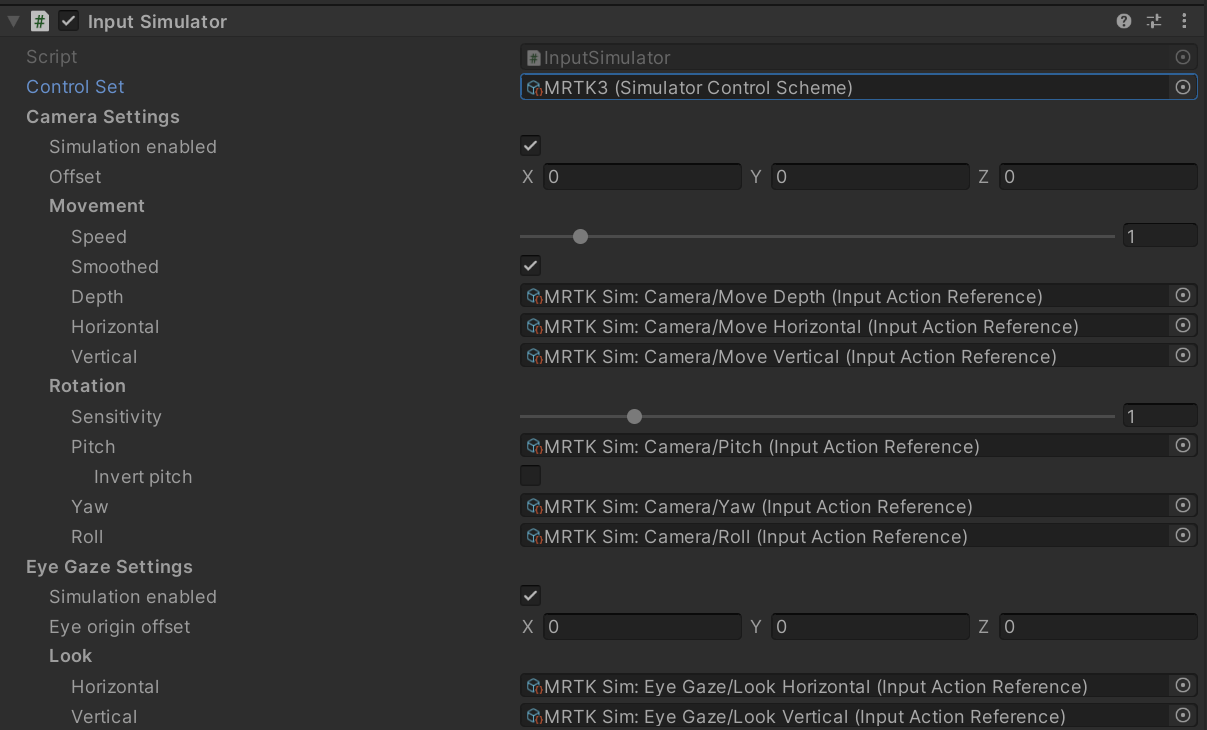
輸入模擬器的按鍵綁定與可用控制集可透過更改 Input Action Reference 輸入模擬器元件的屬性來修改。 建議你從專案視窗的右鍵選單選擇「建立 > 輸入動作」來建立新資產,而不是更改 MRTKInputSimulatorControls。
相機
運動
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 橫向移動 |
鍵盤 |
A / D |
全部 |
|
|
鍵盤 |
左箭頭/右箭頭 |
全部 |
|
| 垂直移動 |
鍵盤 |
Q / E 或 Page Up / Down |
全部 |
|
|
鍵盤 |
翻頁/翻頁 |
全部 |
|
| 深入行動 |
鍵盤 |
W / S |
全部 |
|
|
鍵盤 |
上/下箭頭 |
全部 |
|
旋轉
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 音高 |
滑鼠 |
右鍵 + 前進 / 返回 |
全部 |
|
| 偏航 |
滑鼠 |
右鍵 + 左鍵 / 右鍵 |
全部 |
|
| 翻滾 |
滑鼠 |
右鍵 + 方向盤上下 |
全部 |
|
凝視
注意事項
為了更好地匹配支援眼動追蹤的硬體行為,啟用時會始終追蹤模擬眼球凝視。
看
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 橫向看 |
鍵盤 + 滑鼠 |
Tab + 滑鼠 左/右 |
全部 |
|
| 垂直看 |
鍵盤 + 滑鼠 |
Tab 鍵 + 滑鼠上/下 |
全部 |
|
左手 / 控制器
追蹤
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 鎖定追蹤 |
鍵盤 |
T |
全部 |
在預定位置切換左手開關 |
| 瞬間追蹤 |
鍵盤 |
左班 |
全部 |
在當前滑鼠位置切換左手開關 |
|
鍵盤 |
左翼替代 |
MRTK v3 |
|
|
鍵盤 |
左鍵 Ctrl |
MRTK v2 |
|
運動
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 橫向移動 |
鍵盤 + 滑鼠 |
左移 + 滑鼠 左/右 |
全部 |
|
| 垂直移動 |
鍵盤 + 滑鼠 |
左移 + 滑鼠上/下 |
全部 |
|
| 深入行動 |
鍵盤 + 滑鼠 |
左 Shift + 滑鼠滾輪上下 |
全部 |
|
旋轉
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 音高 |
鍵盤 + 滑鼠 |
左手Alt + 滑鼠前進/後退 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
左鍵 ctrl + 滑鼠前進/返回 |
MRTK v2 |
|
| 偏航 |
鍵盤 + 滑鼠 |
左 Ctrl + 滑鼠 左/右 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
左 Ctrl + 滑鼠 左/右 |
MRTK v2 |
|
| 翻滾 |
鍵盤 + 滑鼠 |
左手Alt+滑鼠滾輪上下 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
左 Ctrl + 滑鼠滾輪上下 |
MRTK v2 |
|
互動
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 按 (按鈕) |
鍵盤 |
左移 + G |
全部 |
|
|
鍵盤 |
左手 Alt + G |
MRTK v3 |
|
|
鍵盤 |
左 Ctrl + G |
MRTK v2 |
|
| 扳機 (按鈕) |
鍵盤 + 滑鼠 |
左 Shift + 左鍵滑鼠 |
全部 |
|
|
鍵盤 + 滑鼠 |
左手Alt+滑鼠左鍵 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
左鍵 Ctrl + 左鍵 |
MRTK v2 |
|
姿勢
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 改變中立姿勢 |
鍵盤 |
左移 + P |
全部 |
在靜止時) 手勢的中性 (在平放與準備狀態間切換。 |
| 面向鏡頭 |
鍵盤 |
左移 + F |
全部 |
切換控制器旋轉,從面向攝影機到與攝影機前向量對齊。 |
右手 / 控制器
追蹤
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 鎖定追蹤 |
鍵盤 |
Y |
全部 |
在預定位置切換左手開關 |
| 瞬間追蹤 |
鍵盤 |
Space |
全部 |
在當前滑鼠位置切換左手開關 |
|
鍵盤 |
左鍵 Ctrl |
MRTK v3 |
|
|
鍵盤 |
右鍵 Ctrl |
MRTK v2 |
|
運動
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 橫向移動 |
鍵盤 + 滑鼠 |
空格 + 滑鼠 左/右 |
全部 |
|
| 垂直移動 |
鍵盤 + 滑鼠 |
空白鍵 + 滑鼠上下鍵 |
全部 |
|
| 深入行動 |
鍵盤 + 滑鼠 |
空格 + 滑鼠滾輪上下 |
全部 |
|
旋轉
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 音高 |
鍵盤 + 滑鼠 |
左鍵 ctrl + 滑鼠前進/返回 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
右 Ctrl + 滑鼠前進/後退 |
MRTK v2 |
|
| 偏航 |
鍵盤 + 滑鼠 |
左 Ctrl + 滑鼠 左/右 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
右 Ctrl + 滑鼠 左/右 |
MRTK v2 |
|
| 翻滾 |
鍵盤 + 滑鼠 |
左 Ctrl + 滑鼠滾輪上下 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
右 Ctrl + 滑鼠滾輪上下 |
MRTK v2 |
|
互動
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 按 (按鈕) |
空間 + G |
全部 |
|
|
|
鍵盤 |
左 Ctrl + G |
MRTK v3 |
|
|
鍵盤 |
右鍵 Ctrl + G |
MRTK v2 |
|
| 扳機 (按鈕) |
鍵盤 + 滑鼠 |
空白鍵 + 滑鼠左鍵 |
全部 |
|
|
鍵盤 + 滑鼠 |
左鍵 Ctrl + 左鍵 |
MRTK v3 |
|
|
鍵盤 + 滑鼠 |
右 Ctrl + 左鍵 |
MRTK v2 |
|
姿勢
| 動作 |
裝置 () |
控制項 |
控制集 |
附註 |
| 改變中立姿勢 |
鍵盤 |
空格 + P |
全部 |
在靜止時) 手勢的中性 (在平放與準備狀態間切換。 |
| 面向鏡頭 |
鍵盤 |
空格 + F |
全部 |
切換控制器旋轉,從面向攝影機到與攝影機前向量對齊。 |