Přidání aktivit trasování do robota
PLATÍ PRO: SDK v4
Aktivita trasování je aktivita, kterou robot může odeslat do bot Framework Emulatoru. Aktivity trasování můžete použít k interaktivnímu ladění robota, protože umožňují zobrazit informace o robotovi, když běží místně.
Aktivity trasování se odesílají pouze do emulátoru a ne do žádného jiného klienta nebo kanálu. Emulátor je zobrazí v protokolu, ale ne v hlavním panelu chatu.
- Trasování aktivit odesílaných přes kontext turn se odesílají prostřednictvím obslužných rutin aktivity pro odesílání zaregistrovaných v kontextu turnu.
- Trasování aktivit odesílaných přes kontext turn jsou přidružené k příchozí aktivitě použitím odkazu na konverzaci, pokud existuje. V případě proaktivní zprávy bude odpověď na ID novým identifikátorem GUID.
- Bez ohledu na to, jak se odesílá, aktivita trasování nikdy nenastaví příznak odpovědi .
Poznámka:
Sady SDK služby Bot Framework JavaScript, C# a Python budou nadále podporovány, ale sada Java SDK se vyřazuje s konečnou dlouhodobou podporou končící v listopadu 2023.
Stávající roboti sestavení pomocí sady Java SDK budou i nadále fungovat.
Pro nové vytváření robotů zvažte použití Power Virtual Agents a přečtěte si o výběru správného řešení chatovacího robota.
Další informace najdete v tématu Budoucnost vytváření robotů.
Použití aktivity trasování
Abyste viděli aktivitu trasování v emulátoru, potřebujete scénář, ve kterém robot odešle aktivitu trasování, například vyvolání výjimky a odeslání aktivity trasování z obslužné rutiny chyby adaptéru.
Odeslání aktivity trasování z robota:
- Vytvořte novou aktivitu.
- Nastavte jeho požadovanou vlastnost typu na "trace".
- Volitelně můžete nastavit jeho název, popisek, hodnotu a vlastnosti typu hodnoty podle potřeby pro trasování.
- K odeslání aktivity trasování použijte metodu aktivity odeslání kontextového objektu turn.
- Tato metoda přidá hodnoty pro zbývající požadované vlastnosti aktivity na základě příchozí aktivity. Mezi tyto vlastnosti patří ID kanálu, adresa URL služby, z a vlastnosti příjemce.
Zobrazení aktivity trasování v emulátoru:
- Spusťte robota místně na svém počítači.
- Otestujte ho pomocí emulátoru.
- Komunikujte s robotem a pomocí kroků ve vašem scénáři vygenerujte aktivitu trasování.
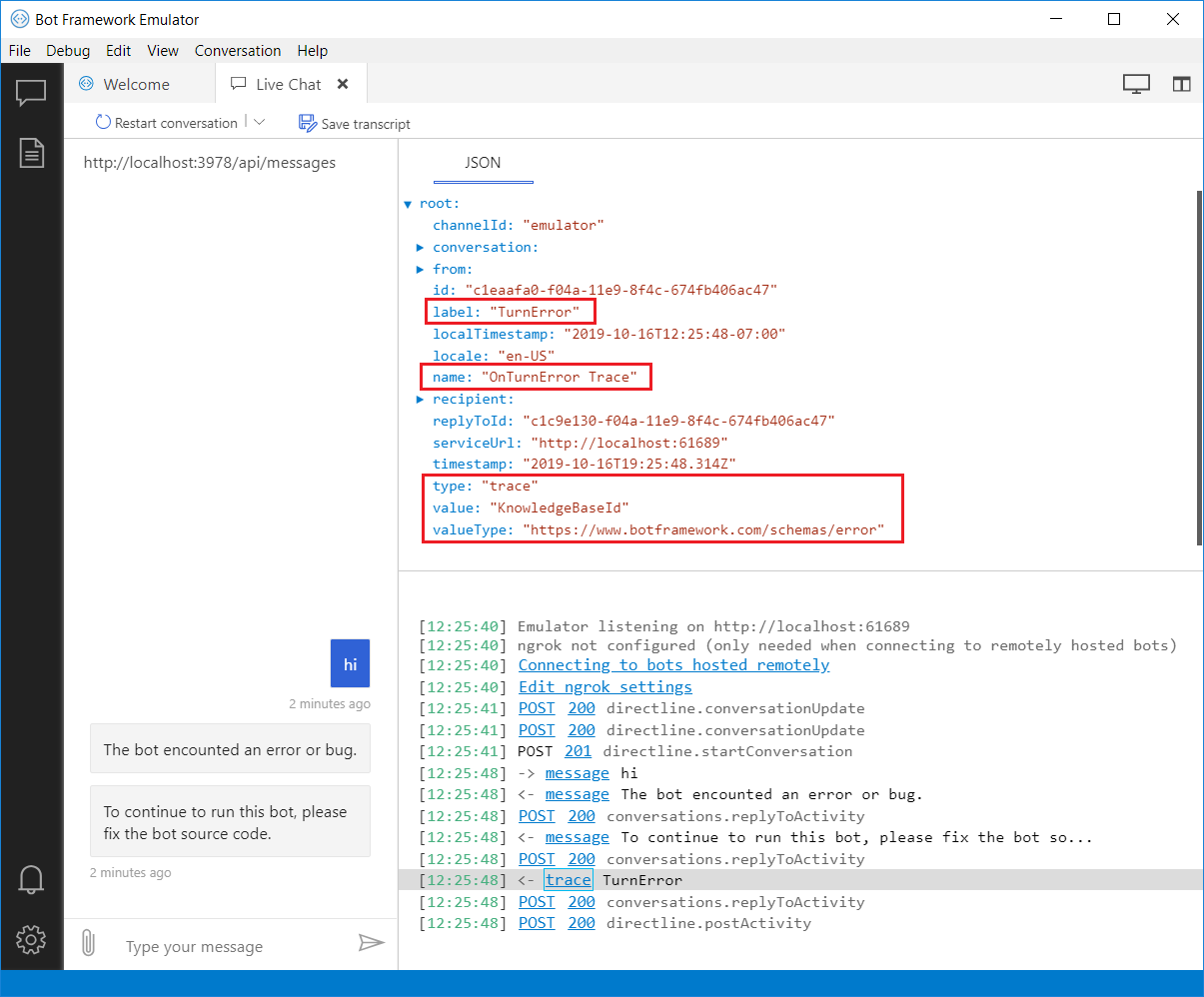
- Když robot vygeneruje aktivitu trasování, aktivita trasování se zobrazí v protokolu emulátoru.
Tady je aktivita trasování, která se může zobrazit, pokud jste spustili robota Core, aniž byste nejprve nastavili QnAMaker znalostní báze, na které robot spoléhá.
Přidání aktivity trasování do obslužné rutiny při chybě adaptéru
Obslužná rutina chyby zapnutí adaptéru zachytí všechny jinak nezachycené výjimky vyvolané robotem během otáčení. Obslužná rutina chyby je vhodným místem pro aktivitu trasování, protože uživateli můžete odeslat uživatelsky přívětivou zprávu a odeslat informace o ladění o výjimce emulátoru.
Tento ukázkový kód pochází z ukázky core bota . Podívejte se na úplnou ukázku v jazyce C#, JavaScript, Python nebo Java.
Obslužná rutina OnTurnError adaptéru vytvoří aktivitu trasování, která zahrne informace o výjimce a odešle ji do emulátoru.
AdapterWithErrorHandler.cs
{
// Log any leaked exception from the application.
// NOTE: In production environment, you should consider logging this to
// Azure Application Insights. Visit https://aka.ms/bottelemetry to see how
// to add telemetry capture to your bot.
logger.LogError(exception, $"[OnTurnError] unhandled error : {exception.Message}");
// Send a message to the user
var errorMessageText = "The bot encountered an error or bug.";
var errorMessage = MessageFactory.Text(errorMessageText, errorMessageText, InputHints.IgnoringInput);
await turnContext.SendActivityAsync(errorMessage);
errorMessageText = "To continue to run this bot, please fix the bot source code.";
errorMessage = MessageFactory.Text(errorMessageText, errorMessageText, InputHints.ExpectingInput);
await turnContext.SendActivityAsync(errorMessage);
if (conversationState != null)
{
try
{
// Delete the conversationState for the current conversation to prevent the
// bot from getting stuck in a error-loop caused by being in a bad state.
// ConversationState should be thought of as similar to "cookie-state" in a Web pages.
await conversationState.DeleteAsync(turnContext);
}
catch (Exception e)
{
logger.LogError(e, $"Exception caught on attempting to Delete ConversationState : {e.Message}");
}
}
// Send a trace activity, which will be displayed in the Bot Framework Emulator
await turnContext.TraceActivityAsync("OnTurnError Trace", exception.Message, "https://www.botframework.com/schemas/error", "TurnError");
};
}
Další kroky
- Postup ladění robota pomocí middlewaru kontroly popisuje, jak přidat middleware, který generuje aktivity trasování.
- K ladění nasazeného robota můžete použít Přehledy aplikace. Další informace najdete v tématu Přidání telemetrie do robota.
- Podrobné informace o jednotlivých typech aktivit najdete ve schématu aktivity služby Bot Framework.