series_fir()
Použije filtr konečných impulsových odpovědí (FIR) na řadu.
Funkce přebírá výraz obsahující dynamické číselné pole jako vstup a použije filtr Konečný impuls odpovědi . filter Zadáním koeficientů se dá použít k výpočtu klouzavého průměru, vyhlazování, zjišťování změn a mnoha dalších případů použití. Funkce vezme sloupec obsahující dynamickou matici a statickou dynamickou matici koeficientů filtru jako vstup a použije filtr na sloupec. Vypíše nový sloupec dynamického pole obsahující filtrovaný výstup.
Syntaxe
series_fir(filtr řad ,[, normalize[, střed]])
Přečtěte si další informace o konvencích syntaxe.
Parametry
| Název | Type | Požadováno | Popis |
|---|---|---|---|
| řada | dynamic |
✔️ | Matice číselných hodnot. |
| filter | dynamic |
✔️ | Matice číselných hodnot obsahující koeficienty filtru. |
| normalizovat | bool |
Určuje, jestli má být filtr normalizován. To znamená, že děleno součtem koeficientů. Pokud filtr obsahuje záporné hodnoty, musí být normalizován jako false, jinak bude nullvýsledek . Pokud není zadáno, předpokládá se výchozí hodnota true v závislosti na přítomnosti záporných hodnot ve filtru. Pokud filtr obsahuje aspoň jednu zápornou hodnotu, předpokládá se, že normalizační hodnota je false. |
|
| střed | bool |
Určuje, zda je filtr použit symetricky v časovém intervalu před a za aktuálním bodem nebo v časovém intervalu od aktuálního bodu zpět. Ve výchozím nastavení je falsestředem , který odpovídá scénáři streamovaných dat, abychom mohli použít filtr pouze na aktuální a starší body. Pro ad hoc zpracování však můžete nastavit , aby truese synchronizovala s časovými řadami. Podívejte se na příklady níže. Tento parametr řídí zpoždění skupiny filtru. |
Tip
Normalizace je pohodlný způsob, jak zajistit, aby součet koeficientů byl 1. Pokud je truenormalizováno, filtr nezmenší ani neztlumí řadu. Například klouzavý průměr čtyř intervalů je možné zadat pomocí filter=[1;1;1;1] a normalizovattrue=, což je jednodušší než zadání [0,25,0,25.0,25,0,25,0,25].
Návraty
Nový sloupec dynamického pole obsahující filtrovaný výstup.
Příklady
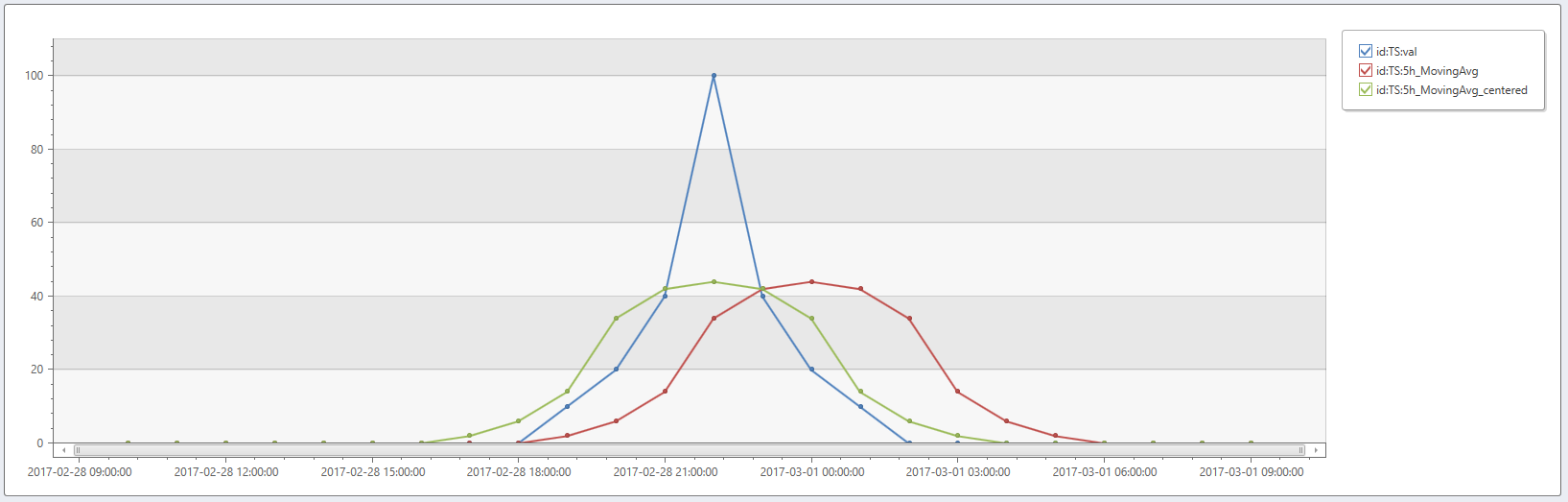
- Výpočet klouzavého průměru pěti bodů nastavením filtru=[1;1;1;1;1] a normalizovat
true= (výchozí). Všimněte si efektu středufalse= (výchozí) vs. :true
range t from bin(now(), 1h) - 23h to bin(now(), 1h) step 1h
| summarize t=make_list(t)
| project
id='TS',
val=dynamic([0, 0, 0, 0, 0, 0, 0, 0, 0, 10, 20, 40, 100, 40, 20, 10, 0, 0, 0, 0, 0, 0, 0, 0]),
t
| extend
5h_MovingAvg=series_fir(val, dynamic([1, 1, 1, 1, 1])),
5h_MovingAvg_centered=series_fir(val, dynamic([1, 1, 1, 1, 1]), true, true)
| render timechart
Tento dotaz vrátí:
5h_MovingAvg: Filtr klouzavého průměru pěti bodů. Špička se vyhladí a její špička se posune o (5-1)/2 = 2h.
5h_MovingAvg_centered: Stejné, ale nastavením center=truese špička nachází v původním umístění.
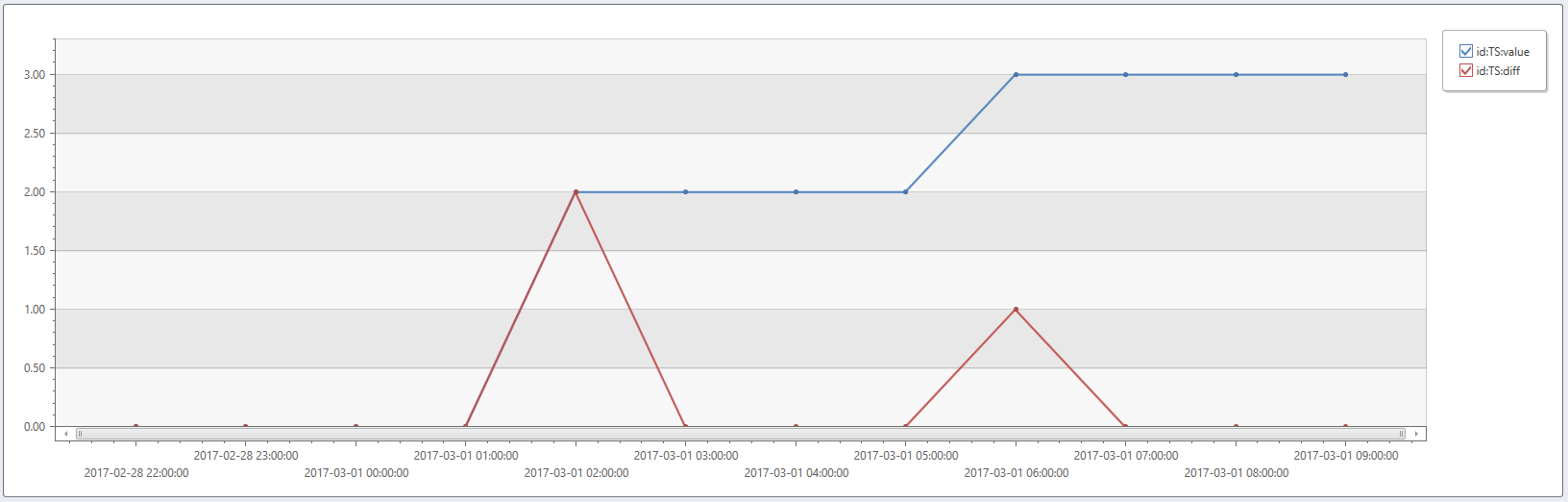
- Pokud chcete vypočítat rozdíl mezi bodem a jeho předchozím bodem, nastavte filtr=[1;-1].
range t from bin(now(), 1h) - 11h to bin(now(), 1h) step 1h
| summarize t=make_list(t)
| project id='TS', t, value=dynamic([0, 0, 0, 0, 2, 2, 2, 2, 3, 3, 3, 3])
| extend diff=series_fir(value, dynamic([1, -1]), false, false)
| render timechart
Váš názor
Připravujeme: V průběhu roku 2024 budeme postupně vyřazovat problémy z GitHub coby mechanismus zpětné vazby pro obsah a nahrazovat ho novým systémem zpětné vazby. Další informace naleznete v tématu: https://aka.ms/ContentUserFeedback.
Odeslat a zobrazit názory pro