Objevte technologie autonomní inteligence
Nejprve analyzujeme dva typy metodologií umělé inteligence, které jsou součástí autonomní inteligence: strojové Učení a hloubkové ztěžování Učení.
Strojové Učení modely jsou počítačové algoritmy, které používají data k odhadování (poučené odhady). Modely strojového učení se liší od tradičních algoritmů v tom, jak jsou navržené. Modely jsou systém propojených "uzlů" (umělých neuronů), které jsou neurální imitace neuronů v našich mozku. Přijímají různé váhy (nebo hodnoty důležitosti) na základě účinku, který má váha každého uzlu na výstup celé sítě. Algoritmus strojového učení používá data k lepšímu získání konkrétní úlohy. Filtry spamu jsou příklady modelů strojového učení. Modely strojového učení se během jejich provozu učí z dat v průběhu času. Existují dvě hlavní kategorie modelů strojového učení: učení pod dohledem a učení bez dohledu. Pomocí učení pod dohledem vytrénujete počítač tak, aby na daný vstup použil popisek. Klasifikátor můžete například vytrénovat tak, že ho zpřístupníte na obrázky koček a psů. Po vytrénování model klasifikuje neoznačené nové obrázky koček a psů.
Učení bez supervize se používá k vyhledání vzorů nebo skrytých struktur v datových sadách, které nebyly kategorizovány nebo označeny.
Hluboké učení je algoritmus strojového Učení, který pomocí více vrstev postupně extrahuje z nezpracovaného vstupu funkce vyšší úrovně. Síť se naučí, jak znázorňovat složité vztahy mezi vstupem a výstupem sítě, protože se vyvíjejí váhy jednotlivých uzlů. Algoritmus hlubokého učení tedy přidružuje úspěch v úkolu k určitým podmínkám a přiřazuje relevantním uzlům větší váhu, a tím posiluje vztahy analogické k neurálním cestám v biologickém mozku.
V Učení počítače musíme funkce zadat ručně. Pokud například potřebujete předpovědět ceny domů, musíte určit, které funkce mají vliv na cenu domu (např. počet ložnic, blízkost dobrých škol atd.). Hluboké Učení algoritmy jsou však navržené tak, aby automaticky detekovaly funkce samy. Můžou také pracovat s nestrukturovanými daty. Tato funkce hlubokého Učení se nazývá reprezentace Učení – je to schopnost učit se reprezentace dat, které usnadňují extrakci užitečných informací při vytváření klasifikátorů nebo jiných prediktorů. Díky této schopnosti jsou hloubkové Učení algoritmy výkonnější, ale zároveň se tím zvyšuje složitost algoritmu z hlediska potřeby dat (potřebují miliony datových bodů) a výpočetních prostředků.
Dalším typem strojového Učení je Učení výztužné Učení (RL). Na rozdíl od učení pod dohledem a učení bez dohledu, které pracují s využitím statické datové sady, funguje seznam RL s daty z dynamického prostředí. V tomto případě cílem není clusterovat data nebo označovat data, ale najít nejlepší posloupnost akcí pro vygenerování optimálního výsledku. Výztužné učení řeší problém nalezení nejlepší posloupnosti akcí tím, že softwarovému agentu umožní pracovat s prostředím a učit se z něj. Agenta si můžeme představit jako funkci. Provádí pozorování stavu z interakce s prostředím (vstupy) a mapuje je na akce, které by měl agent provést v každém kroku (výstupy). Tato funkce se nazývá zásada. Vzhledem k množině pozorování, tedy stavu, se zásada rozhodne, která akce se má provést. Zásady se dynamicky mění na základě akcí provedených z prostředí a získané odměny. Cílem agenta je maximalizovat dlouhodobou odměnu, nejen odměnu v každém kroku.
Posila Učení byla původně vývojem teorie kontroly v 1960s Richard Sutton a několika dalšími. Uložili učení z funkce v tabulce. Tabulka omezuje škálovatelnost seznamu odvolaných řádků, protože vyžaduje miliony a miliardy řádků. Pokud zkombinujeme schopnost učení reprezentace prostřednictvím hlubokých neurálních sítí s výztužným učením, získáme hloubkovou výztužnou Učení (DRL). DrL řeší problémy RL dvěma způsoby. Za prvé, pokud se stavový prostor a prostor akcí stanou příliš velkým a není možné použít tabulku k uložení těchto reprezentací, DRL pomáhá ukládat tyto poznatky v neurální síti. Neurální síť pak může sestavit komplexní nelineární vztahy a reagovat na ně. Za druhé, neurální sítě následují univerzální aproximální větu , která říká, že pro libovolnou funkci existuje síť, která může tuto funkci odhadnout. To znamená, že DRL dokáže zpracovat velké stavové prostory a může řídit jakýkoli systém. DrLs (Deep Výztuže Učení) vykazují lidské schopnosti při hraní her, jako je Go, a dokonce překročily nejlepší lidské hráče v těchto hrách.
V Učení zesílení je agent pod kontrolou algoritmu strojového učení. V každém kroku agent sleduje stavy a komunikuje s prostředím a učí se důsledky svých akcí prostřednictvím pokusu a chyby. Agent se učí měnit své chování v reakci na přijaté odměny z důvodu svých akcí.
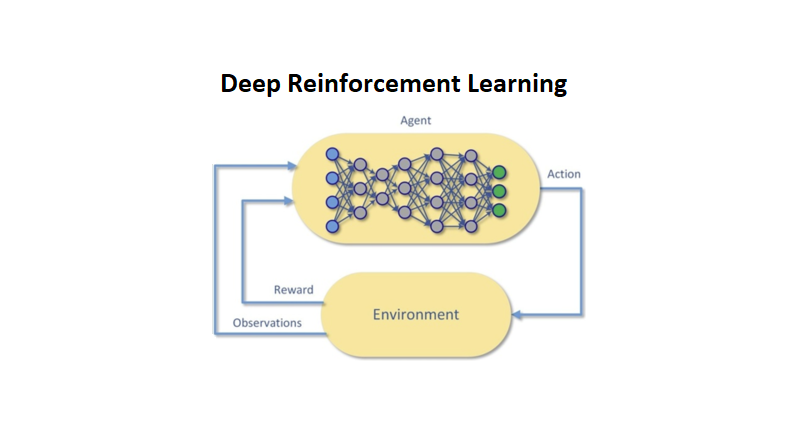
Na předchozí imagi agent DRL sleduje prostředí. Rozhodne o akci, která se spustí v prostředí, a je pozitivně odměněna, pokud akce upřednostňuje cíl. Jinak je to záporně odměněno.
Hluboké výztuže Učení má některé z následujících jedinečných vlastností:
- Chování změny v reakci na měnící se podmínky: V reakci na změny v modelu procesu se DRL může naučit a změnit jeho chování cvičením v mnoha scénářích.
- Řízení pomocí přibližných nelineárních korelací Vzhledem k tomu, že jsou založeny na neurálních sítích, můžou se seznamy DRLs učit složité nelineární vztahy. Tyto vztahy vyžadují, aby rozhodnutí byla provedena napříč přibližnými a nelineárními korelacemi, která je obtížná nebo nemožné, a to ani odborníky na danou problematiku.
- Zareagovat na komplexní vnímání. Postupy zotavení po havárii mohou reagovat na komplexní vnímání, jako je vizuální vnímání, zvukové vnímání, pochopení kategorií nebo klasifikací pro kontrolu systému.
- Reagujte na změny prostředí, které se neměří přímo. Zřídka je každá klíčová systémová proměnná měřená, ale lidské operátory dobře řídí systémy. Automatizované systémy neřídí systémy a procesy, když se systémové vstupy nebo samotný systém mění neznámými způsoby, ale řízení za těchto podmínek je často vyžadováno v reálných systémech. Algoritmy DRL můžou tyto situace zvládnout, když se změny systému nedají měřit.
- Naučte se strategii. Lidské operátory často používají strategii k rozhodování a výuce, které kontrolní akce se mají provádět. Hluboké posílení Učení se může automaticky učit strategie.
Pokud jsou některé nebo všechny tyto podmínky identifikovány v průmyslových strojích nebo procesech, je to znamení, že použití těchto autonomních inteligentních technologií jako součástí strojového učení nám může pomoct předvést aktuální metody používané k řízení průmyslového systému.