Solution ideas
This article describes a solution idea. Your cloud architect can use this guidance to help visualize the major components for a typical implementation of this architecture. Use this article as a starting point to design a well-architected solution that aligns with your workload's specific requirements.
This architecture uses Custom Vision to classify images taken by a simulated drone. It provides a way to combine AI and the Internet of Things (IoT). Azure Custom Vision can also be used for object detection purpose.
Architecture
Download a Visio file of this architecture.
Workflow
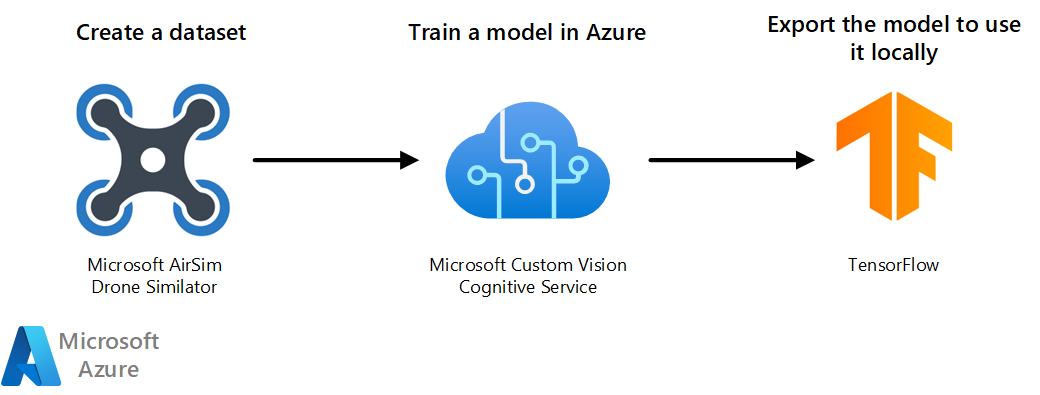
- Use AirSim's 3D-rendered environment to take images taken with the drone. Use the images as the training dataset.
- Import and tag the dataset in a Custom Vision project. The cognitive service trains and tests the model.
- Export the model into TensorFlow format so you can use it locally.
- The model can also be deployed to a container or to mobile devices.
Components
Microsoft AirSim Drone simulator
Microsoft AirSim Drone simulator is built on the Unreal Engine. The simulator is open-source, cross-platform, and developed to help AI research. In this architecture, it creates the dataset of images used to train the model.
Azure Custom Vision
Azure Custom Vision is part of Azure Cognitive Services. In this architecture, it creates an image classifier model.
TensorFlow
TensorFlow is an open-source platform for machine learning (ML). It's a tool that helps you develop and train ML models. When you export your model to TensorFlow format, you'll have a protocol buffer file with the Custom Vision model that you can use locally in your script.
Scenario details
Azure AI services offers many possibilities for Artificial Intelligence (AI) solutions. One of them is Azure Custom Vision, which allows you to build, deploy, and improve your image classifiers. This architecture uses Custom Vision to classify images taken by a simulated drone. It provides a way to combine AI and the Internet of Things (IoT). Azure Custom Vision can also be used for object detection purpose.
Potential use case
This solution is ideal for the rescue, simulation, robotics, aircraft, aerospace, and aviation industries.
Microsoft Search and Rescue Lab suggests a hypothetical use case for Custom Vision. In the lab, you fly a Microsoft AirSim simulated drone around in a 3D-rendered environment. You use the simulated drone to capture synthetic images of the animals in that environment. After creating a dataset of images, you use the dataset to train a Custom Vision classifier model. To train the model, you tag the images with the names of the animals. When you fly the drone again, take new images of the animals. This solution identifies the name of the animal in each new image.
In a practical application of the lab, an actual drone replaces the Microsoft AirSim simulated drone. If a pet is lost, the owner provides images of the pet to the Custom Vision model trainer. Just like in the simulation, the images are used to train the model to recognize the pet. Then, the drone pilot searches an area where the lost pet might be. As it finds animals along the way, the drone's camera can capture images and determine if the animal is the lost pet.
Deploy this scenario
To deploy this reference architecture, follow the steps described in the GitHub repo of the Search and Rescue Lab.
Contributors
This article is maintained by Microsoft. It was originally written by the following contributors.
Principal authors:
- Jose Contreras | Principal Software Engineer
Next steps
- Learn more about Microsoft AirSim
- Learn more about Azure AI Custom Vision
- Learn more about Azure AI Services
Related resources
Read other Azure Architecture Center articles: