Operaciones de análisis espacial
El análisis espacial permite analizar secuencias de vídeo desde dispositivos de cámara en tiempo real. Para cada dispositivo de cámara que configure, las operaciones de análisis espacial generarán un flujo de salida de mensajes JSON enviados a la instancia de Azure IoT Hub.
El contenedor de análisis espacial implementa las operaciones siguientes. Puede configurar estas operaciones en el manifiesto de implementación del contenedor.
| Identificador de operación | Descripción |
|---|---|
cognitiveservices.vision.spatialanalysis-personcount |
Cuenta a las personas que se encuentran en una zona designada del campo visual de la cámara. La zona debe quedar completamente cubierta por una sola cámara para que PersonCount registre un total preciso. Emite un evento personCountEvent inicial y, luego, eventos personCountEvent cuando el recuento cambia. |
cognitiveservices.vision.spatialanalysis-personcrossingline |
Hace un seguimiento de cuando una persona cruza una línea designada en el campo visual de la cámara. Emite un evento personLineEvent cuando la persona cruza la línea y proporciona información direccional. |
cognitiveservices.vision.spatialanalysis-personcrossingpolygon |
Emite un evento personZoneEnterExitEvent cuando una persona entra o sale de la zona designada y proporciona información direccional con el lado de la zona que se ha cruzado. Emite un evento personZoneDwellTimeEvent cuando la persona sale de la zona y proporciona información direccional, así como el número de milisegundos que la persona pasó dentro de la zona. |
cognitiveservices.vision.spatialanalysis-persondistance |
Comprueba si las personas infringen una regla de distancia mínima. Emite un evento personDistanceEvent de manera periódica con la ubicación de cada infracción de distancia. |
cognitiveservices.vision.spatialanalysis |
La operación genérica que se puede usar para ejecutar todos los escenarios mencionados anteriormente. Esta opción es más útil si quiere ejecutar varios escenarios en la misma cámara o usar los recursos del sistema (por ejemplo, la GPU) más eficazmente. |
Todas las operaciones anteriores también están disponibles en la versión .debug del servicio (por ejemplo, cognitiveservices.vision.spatialanalysis-personcount.debug). La depuración permite visualizar fotogramas de vídeo a medida que se procesan. Deberá ejecutar xhost + en el equipo host para habilitar la visualización de los eventos y los fotogramas de vídeo.
Importante
Los modelos de IA de Visión de Azure AI detectan y localizan la presencia humana en las secuencias de vídeo y muestran un rectángulo de selección alrededor del cuerpo humano. Los modelos de IA no intentan detectar las identidades ni los datos demográficos de los individuos.
Parámetros de la operación.
A continuación se incluyen los parámetros necesarios para cada una de estas operaciones de análisis espacial.
| Parámetros de la operación. | Descripción |
|---|---|
Operation ID |
Identificador de operación de la tabla anterior. |
enabled |
Booleano: true o false |
VIDEO_URL |
Dirección URL de RTSP del dispositivo de cámara (ejemplo: rtsp://username:password@url). El análisis espacial admite la secuencia con codificación H.264 mediante RTSP, HTTP o mp4. Video_URL se puede proporcionar como un valor de cadena de Base64 ofuscado mediante el cifrado AES, y, si la dirección URL del vídeo se ofusca, KEY_ENV y IV_ENV se deben proporcionar como variables de entorno. Se puede encontrar una utilidad de ejemplo para generar claves y cifrado aquí. |
VIDEO_SOURCE_ID |
Nombre descriptivo para el dispositivo de cámara o la secuencia de vídeo. Se devolverá con la salida JSON del evento. |
VIDEO_IS_LIVE |
True para dispositivos de cámara; false para vídeos grabados. |
VIDEO_DECODE_GPU_INDEX |
GPU con la que se va a decodificar el fotograma de vídeo. De manera predeterminada, es 0. Este valor debe ser igual que gpu_index en otra configuración de nodo, como DETECTOR_NODE_CONFIG y CAMERACALIBRATOR_NODE_CONFIG. |
INPUT_VIDEO_WIDTH |
Ancho de fotograma de la secuencia o vídeo de entrada (por ejemplo, 1920). Es un campo opcional y, si se proporciona, el fotograma se escalará hasta esta dimensión mientras se conserva la relación de aspecto. |
DETECTOR_NODE_CONFIG |
JSON que indica en qué GPU se va a ejecutar el nodo detector. Debería tener el siguiente formato: "{ \"gpu_index\": 0 }",. |
TRACKER_NODE_CONFIG |
JSON que indica si se debe calcular la velocidad en el nodo de seguimiento, o no. Debería tener el siguiente formato: "{ \"enable_speed\": true }",. |
CAMERA_CONFIG |
JSON que indica los parámetros calibrados de la cámara para varias cámaras. Si la aptitud que ha usado requiere calibración y ya tiene el parámetro de la cámara, puede usar esta configuración para proporcionarlo directamente. Debe tener el siguiente formato: "{ \"cameras\": [{\"source_id\": \"endcomputer.0.persondistancegraph.detector+end_computer1\", \"camera_height\": 13.105561256408691, \"camera_focal_length\": 297.60003662109375, \"camera_tiltup_angle\": 0.9738943576812744}] }", source_id se usa para identificar cada cámara. Se puede obtener de source_info del evento que hemos publicado. Solo surtirá efecto cuando do_calibration=false se encuentre en DETECTOR_NODE_CONFIG. |
CAMERACALIBRATOR_NODE_CONFIG |
JSON que indica en qué GPU se va a ejecutar el nodo de calibración de la cámara y si se debe usar la calibración o no. Debería tener el siguiente formato: "{ \"gpu_index\": 0, \"do_calibration\": true, \"enable_orientation\": true}",. |
CALIBRATION_CONFIG |
JSON que indica los parámetros para controlar cómo funciona la calibración de la cámara. Debería tener el siguiente formato: "{\"enable_recalibration\": true, \"quality_check_frequency_seconds\": 86400}",. |
SPACEANALYTICS_CONFIG |
Configuración JSON para la zona y la línea tal como se describe a continuación. |
ENABLE_FACE_MASK_CLASSIFIER |
True para habilitar la detección de personas que lleven máscaras faciales en la secuencia de vídeo; False para deshabilitarla. De manera predeterminada, esta opción está deshabilitada. La detección de máscaras faciales requiere que el parámetro de ancho de vídeo de entrada sea 1920 "INPUT_VIDEO_WIDTH": 1920. El atributo de máscara facial no se devolverá si la persona detectada no está mirando a la cámara o está demasiado lejos de ella. Para más información, consulte la ubicación de la cámara. |
STATIONARY_TARGET_REMOVER_CONFIG |
Archivo JSON que indica los parámetros para eliminar destinos fijos, lo que permite aprender y omitir destinos falsos positivos fijos a largo plazo, como maniquíes o personas en imágenes. La configuración debería tener el siguiente formato: "{\"enable\": true, \"bbox_dist_threshold-in_pixels\": 5, \"buffer_length_in_seconds\": 3600, \"filter_ratio\": 0.2 }" |
Configuración de parámetros del nodo de detección
A continuación se muestra un ejemplo de los parámetros DETECTOR_NODE_CONFIG de todas las operaciones de análisis espacial.
{
"gpu_index": 0,
"enable_breakpad": false
}
| Nombre | Tipo | Description |
|---|---|---|
gpu_index |
string | Índice de la GPU en que se ejecutará esta operación. |
enable_breakpad |
bool | Indica si se habilitará Breakpad, que se usa para generar volcados de memoria para su uso en la depuración. De forma predeterminada, su valor es false. Si lo establece en true, también debe agregar "CapAdd": ["SYS_PTRACE"] en la parte HostConfig del contenedor createOptions. De forma predeterminada, el volcado de memoria se carga en la aplicación RealTimePersonTracking de AppCenter; si quiere que se carguen en su propia aplicación de AppCenter, puede invalidar la variable de entorno RTPT_APPCENTER_APP_SECRET con el secreto de su aplicación. |
Configuración de los parámetros del nodo de calibración de la cámara
A continuación se muestra un ejemplo de los parámetros CAMERACALIBRATOR_NODE_CONFIG de todas las operaciones de análisis espacial.
{
"gpu_index": 0,
"do_calibration": true,
"enable_breakpad": false,
"enable_orientation": true
}
| Nombre | Tipo | Description |
|---|---|---|
do_calibration |
string | Indica que la calibración está activada. do_calibration debe ser true para que cognitiveservices.vision.spatialanalysis-persondistance funcione correctamente. do_calibration se establece de forma predeterminada en True. |
enable_breakpad |
bool | Indica si se habilitará Breakpad, que se usa para generar volcados de memoria para su uso en la depuración. De forma predeterminada, su valor es false. Si lo establece en true, también debe agregar "CapAdd": ["SYS_PTRACE"] en la parte HostConfig del contenedor createOptions. De forma predeterminada, el volcado de memoria se carga en la aplicación RealTimePersonTracking de AppCenter; si quiere que se carguen en su propia aplicación de AppCenter, puede invalidar la variable de entorno RTPT_APPCENTER_APP_SECRET con el secreto de su aplicación. |
enable_orientation |
bool | Indica si desea calcular la orientación de las personas detectadas, o no. enable_orientation se establece de forma predeterminada en True. |
Configuración de calibración
Este es un ejemplo de los parámetros CALIBRATION_CONFIG de todas las operaciones de análisis espacial.
{
"enable_recalibration": true,
"calibration_quality_check_frequency_seconds": 86400,
"calibration_quality_check_sample_collect_frequency_seconds": 300,
"calibration_quality_check_one_round_sample_collect_num": 10,
"calibration_quality_check_queue_max_size": 1000,
"calibration_event_frequency_seconds": -1
}
| Nombre | Tipo | Descripción |
|---|---|---|
enable_recalibration |
bool | Indica si la recalibración automática está activada. El valor predeterminado es true. |
calibration_quality_check_frequency_seconds |
int | Número mínimo de segundos entre cada comprobación de calidad para determinar si se necesita o no una nueva calibración. El valor predeterminado es 86400 (24 horas). Solo se usa con enable_recalibration=True. |
calibration_quality_check_sample_collect_frequency_seconds |
int | Número mínimo de segundos entre la recopilación de nuevas muestras de datos para la recalibración y la comprobación de calidad. El valor predeterminado es 300 (5 minutos). Solo se usa con enable_recalibration=True. |
calibration_quality_check_one_round_sample_collect_num |
int | Número mínimo de muestras de datos nuevas que se van a recopilar por cada ronda de recopilación de muestras. El valor predeterminado es 10. Solo se usa con enable_recalibration=True. |
calibration_quality_check_queue_max_size |
int | Número máximo de muestras de datos que se van a almacenar cuando se calibre el modelo de cámara. El valor predeterminado es 1000. Solo se usa con enable_recalibration=True. |
calibration_event_frequency_seconds |
int | Frecuencia de salida (segundos) de los eventos de calibración de cámara. Un valor de -1 indica que no se debe enviar la calibración de la cámara, a menos que se haya cambiado la información de calibración de la cámara. El valor predeterminado es -1. |
Salida de calibración de la cámara
A continuación se muestra un ejemplo de la salida de calibración de la cámara si está habilitada. Los puntos suspensivos indican que hay más objetos del mismo tipo en una lista.
{
"type": "cameraCalibrationEvent",
"sourceInfo": {
"id": "camera1",
"timestamp": "2021-04-20T21:15:59.100Z",
"width": 512,
"height": 288,
"frameId": 531,
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 13.294151306152344,
"focalLength": 372.0000305175781,
"tiltupAngle": 0.9581864476203918,
"lastCalibratedTime": "2021-04-20T21:15:59.058"
}
},
"zonePlacementInfo": {
"optimalZoneRegion": {
"type": "POLYGON",
"points": [
{
"x": 0.8403755868544601,
"y": 0.5515320334261838
},
{
"x": 0.15805946791862285,
"y": 0.5487465181058496
}
],
"name": "optimal_zone_region"
},
"fairZoneRegion": {
"type": "POLYGON",
"points": [
{
"x": 0.7871674491392802,
"y": 0.7437325905292479
},
{
"x": 0.22065727699530516,
"y": 0.7325905292479109
}
],
"name": "fair_zone_region"
},
"uniformlySpacedPersonBoundingBoxes": [
{
"type": "RECTANGLE",
"points": [
{
"x": 0.0297339593114241,
"y": 0.0807799442896936
},
{
"x": 0.10015649452269171,
"y": 0.2757660167130919
}
]
}
],
"personBoundingBoxGroundPoints": [
{
"x": -22.944068908691406,
"y": 31.487680435180664
}
]
}
}
Consulte Salida de la operación de análisis espacial para obtener detalles sobre source_info.
| Nombre del campo ZonePlacementInfo | Tipo | Description |
|---|---|---|
optimalZonePolygon |
object | Un polígono en la imagen de la cámara donde se pueden colocar líneas o zonas para las operaciones, con el fin de obtener resultados óptimos. Cada par de valores representa la x e y de los vértices de un polígono. El polígono representa las áreas en las que se hace un seguimiento o un recuento de las personas y los puntos de polígono se basan en coordenadas normalizadas (0-1), donde la esquina superior izquierda es (0.0, 0.0) y la esquina inferior derecha es (1.0, 1.0). |
fairZonePolygon |
object | Un polígono en la imagen de la cámara donde se pueden colocar líneas o zonas para las operaciones, con el fin de obtener resultados buenos, pero posiblemente no óptimos. Consulte optimalZonePolygon arriba para obtener una explicación detallada del contenido. |
uniformlySpacedPersonBoundingBoxes |
list | Una lista de rectángulos delimitadores de personas dentro de la imagen de cámara distribuidos uniformemente en un espacio real. Los valores se basan en coordenadas normalizadas (0-1). |
personBoundingBoxGroundPoints |
list | Lista de coordenadas en el plano del suelo con respecto a la cámara. Cada coordenada corresponde a la parte inferior derecha del rectángulo delimitador de uniformlySpacedPersonBoundingBoxes con el mismo índice. Para más información sobre cómo se calculan las coordenadas en el plano de planta, consulte los campos centerGroundPointX/centerGroundPointY de la sección Formato JSON para Conclusiones de IA de cognitiveservices.vision.spatialanalysis-persondistance. |
Ejemplo de la salida de información de la selección de ubicación de zona visualizada en un fotograma de vídeo: 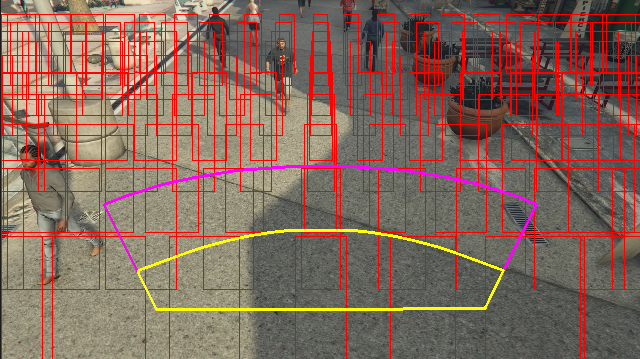
La información de la selección de ubicación de zona proporciona sugerencias para las configuraciones, pero deben seguirse las directrices de Configuración de la cámara para obtener mejores resultados.
Configuración de parámetros del nodo de seguimiento
Puede configurar el cálculo de la velocidad a través de la configuración de parámetros del nodo de seguimiento.
{
"enable_speed": true,
"remove_stationary_objects": true,
"stationary_objects_dist_threshold_in_pixels": 5,
"stationary_objects_buffer_length_in_seconds": 3600,
"stationary_objects_filter_ratio": 0.2
}
| Nombre | Tipo | Descripción |
|---|---|---|
enable_speed |
bool | Indica si desea calcular la velocidad de las personas detectadas, o no. enable_speed se establece de forma predeterminada en True. Se recomienda encarecidamente habilitar tanto la velocidad como la orientación para tener los mejores valores estimados. |
remove_stationary_objects |
bool | Indica si desea quitar objetos fijos. remove_stationary_objects se establece de forma predeterminada en True. |
stationary_objects_dist_threshold_in_pixels |
int | El umbral de distancia de vecindad para determinar si dos cuadros de detección se pueden tratar como parte de la misma detección. stationary_objects_dist_threshold_in_pixels se establece de forma predeterminada en 5. |
stationary_objects_buffer_length_in_seconds |
int | El período mínimo de tiempo en segundos que el sistema tiene que volver a mirar para determinar si un destino es fijo o no. stationary_objects_buffer_length_in_seconds se establece de forma predeterminada en 3600. |
stationary_objects_filter_ratio |
FLOAT | Si un destino se detecta repetidamente en la misma ubicación (definida en stationary_objects_dist_threshold_in_pixels) para un valor mayor de stationary_objects_filter_ratio (0,2 significa 20 %) del intervalo de tiempo stationary_objects_buffer_length_in_seconds, se tratará como un destino fijo. stationary_objects_filter_ratio se establece de forma predeterminada en 0.2. |
Configuración y salida de operaciones de análisis espacial
Configuración de zona para personcount
A continuación se muestra un ejemplo de una entrada JSON para el parámetro SPACEANALYTICS_CONFIG que configura una zona. Puede configurar varias zonas para esta operación.
{
"zones": [
{
"name": "lobbycamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events": [
{
"type": "count",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
]
}
| Nombre | Tipo | Description |
|---|---|---|
zones |
list | Lista de zonas. |
name |
string | Nombre descriptivo de esta zona. |
polygon |
list | Cada par de valores representa la x e y de los vértices de un polígono. El polígono representa las áreas en las que se realiza el seguimiento o el recuento de personas. Los puntos de polígono se basan en coordenadas normalizadas (0-1), en las que la esquina superior izquierda indica 0,0, 0,0 y la esquina inferior derecha indica 1,0, 1,0. |
threshold |
FLOAT | Los eventos se generan cuando la persona tiene un tamaño mayor que este número de píxeles dentro de la zona. Se trata de un campo opcional y el valor está en relación (0-1). Por ejemplo, el valor 0,0253 será de 13 píxeles en un vídeo con ancho de imagen = 512 (0,0253 X 512 = ~13). |
type |
string | Para cognitiveservices.vision.spatialanalysis-personcount, debería ser count. |
trigger |
string | Tipo de desencadenador para enviar un evento. Los valores admitidos son event para enviar eventos cuando el recuento cambia o interval para enviar eventos de manera periódica, independientemente de si el recuento ha cambiado o no. |
output_frequency |
int | Velocidad a la que se generan los eventos. Cuando output_frequency = X, se genera cada X evento, por ejemplo, output_frequency = 2 significa que se genera evento por medio. output_frequency se aplica a event y interval. |
focus |
string | Ubicación del punto en el rectángulo delimitador de la persona usado para calcular los eventos. El valor del foco puede ser footprint (la superficie de la persona), bottom_center (la parte inferior central del rectángulo delimitador de la persona) o center (el centro del cuadro delimitador de la persona). |
Configuración de línea para personcrossingline
A continuación se muestra un ejemplo de una entrada JSON para el parámetro SPACEANALYTICS_CONFIG que configura una línea. Puede configurar varias líneas de cruce para esta operación.
{
"lines": [
{
"name": "doorcamera",
"line": {
"start": {
"x": 0,
"y": 0.5
},
"end": {
"x": 1,
"y": 0.5
}
},
"events": [
{
"type": "linecrossing",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
]
}
| Nombre | Tipo | Description |
|---|---|---|
lines |
list | Lista de líneas. |
name |
string | Nombre descriptivo de esta línea. |
line |
list | Definición de la línea. Se trata de una línea direccional que le permite comprender "entrada" frente a "salida". |
start |
value pair | Coordenadas x, y para el punto inicial de la línea. Los valores flotantes representan la posición del vértice relativa a la esquina superior izquierda. Para calcular los valores x, y absolutos, debe multiplicar estos valores por el tamaño del fotograma. |
end |
value pair | Coordenadas x, y para el punto final de la línea. Los valores flotantes representan la posición del vértice relativa a la esquina superior izquierda. Para calcular los valores x, y absolutos, debe multiplicar estos valores por el tamaño del fotograma. |
threshold |
FLOAT | Los eventos se generan cuando la persona tiene un tamaño mayor que este número de píxeles dentro de la zona. Se trata de un campo opcional y el valor está en relación (0-1). Por ejemplo, el valor 0,0253 será de 13 píxeles en un vídeo con ancho de imagen = 512 (0,0253 X 512 = ~13). |
type |
string | Para cognitiveservices.vision.spatialanalysis-personcrossingline, debería ser linecrossing. |
trigger |
string | Tipo de desencadenador para enviar un evento. Valores admitidos: "event": se activa cuando alguna persona cruza la línea. |
focus |
string | Ubicación del punto en el rectángulo delimitador de la persona usado para calcular los eventos. El valor del foco puede ser footprint (la superficie de la persona), bottom_center (la parte inferior central del rectángulo delimitador de la persona) o center (el centro del cuadro delimitador de la persona). El valor predeterminado es footprint. |
Configuración de zona para personcrossingpolygon
Este es un ejemplo de una entrada JSON para el parámetro SPACEANALYTICS_CONFIG que configura una zona. Puede configurar varias zonas para esta operación.
{
"zones":[
{
"name": "queuecamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "zonecrossing",
"config":{
"trigger": "event",
"focus": "footprint"
}
}]
},
{
"name": "queuecamera1",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "zonedwelltime",
"config":{
"trigger": "event",
"focus": "footprint"
}
}]
}]
}
| Nombre | Tipo | Description |
|---|---|---|
zones |
list | Lista de zonas. |
name |
string | Nombre descriptivo de esta zona. |
polygon |
list | Cada par de valores representa la x e y de los vértices del polígono. El polígono representa las áreas en las que se realiza el seguimiento o el recuento de personas. Los valores flotantes representan la posición del vértice relativa a la esquina superior izquierda. Para calcular los valores x, y absolutos, debe multiplicar estos valores por el tamaño del fotograma. |
target_side |
int | Especifica un lado de la zona definida por polygon para medir el tiempo durante el que las personas se enfrentan a ese lado mientras están en la zona. "dwellTimeForTargetSide" generará esa hora estimada. Cada lado es un borde numerado entre los dos vértices del polígono que representa la zona. Por ejemplo, la arista entre los dos primeros vértices del polígono representa el primer lado ("side"=1). El valor de target_side está entre [0,N-1] donde N es el número de lados de polygon. Este campo es opcional. |
threshold |
FLOAT | Los eventos se generan cuando la persona tiene un tamaño mayor que este número de píxeles dentro de la zona. Se trata de un campo opcional y el valor está en relación (0-1). Por ejemplo, el valor 0,074 será de 38 píxeles en un vídeo con ancho de imagen = 512 (0,074 X 512 = ~38). |
type |
string | Para cognitiveservices.vision.spatialanalysis-personcrossingpolygon, debe ser zonecrossing o zonedwelltime. |
trigger |
string | Tipo de desencadenador para enviar un evento. Valores admitidos: "event": se activa cuando alguna persona entra o sale de la zona. |
focus |
string | Ubicación del punto en el rectángulo delimitador de la persona usado para calcular los eventos. El valor del foco puede ser footprint (la superficie de la persona), bottom_center (la parte inferior central del rectángulo delimitador de la persona) o center (el centro del cuadro delimitador de la persona). El valor predeterminado es footprint. |
Configuración de zona para persondistance
Este es un ejemplo de una entrada JSON para el parámetro SPACEANALYTICS_CONFIG que configura una zona para cognitiveservices.vision.spatialanalysis-persondistance. Puede configurar varias zonas para esta operación.
{
"zones":[{
"name": "lobbycamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "persondistance",
"config":{
"trigger": "event",
"output_frequency":1,
"minimum_distance_threshold":6.0,
"maximum_distance_threshold":35.0,
"aggregation_method": "average",
"focus": "footprint"
}
}]
}]
}
| Nombre | Tipo | Description |
|---|---|---|
zones |
list | Lista de zonas. |
name |
string | Nombre descriptivo de esta zona. |
polygon |
list | Cada par de valores representa la x e y de los vértices del polígono. El polígono representa las áreas en las que se cuentan las personas y se mide la distancia entre ellas. Los valores flotantes representan la posición del vértice relativa a la esquina superior izquierda. Para calcular los valores x, y absolutos, debe multiplicar estos valores por el tamaño del fotograma. |
threshold |
FLOAT | Los eventos se generan cuando la persona tiene un tamaño mayor que este número de píxeles dentro de la zona. Se trata de un campo opcional y el valor está en relación (0-1). Por ejemplo, el valor 0,0253 será de 13 píxeles en un vídeo con ancho de imagen = 512 (0,0253 X 512 = ~13). |
type |
string | Para cognitiveservices.vision.spatialanalysis-persondistance, debería ser persondistance. |
trigger |
string | Tipo de desencadenador para enviar un evento. Los valores admitidos son event para enviar eventos cuando el recuento cambia o interval para enviar eventos de manera periódica, independientemente de si el recuento ha cambiado o no. |
output_frequency |
int | Velocidad a la que se generan los eventos. Cuando output_frequency = X, se genera cada X evento, por ejemplo, output_frequency = 2 significa que se genera evento por medio. output_frequency se aplica a event y interval. |
minimum_distance_threshold |
FLOAT | Distancia en pies que desencadenará un evento "TooClose" cuando las personas estén más cerca de esa distancia entre sí. |
maximum_distance_threshold |
FLOAT | Distancia en pies que desencadenará un evento "TooFar" cuando las personas estén más lejos de esa distancia entre sí. |
aggregation_method |
string | El método para el resultado persondistance agregado. El elemento aggregation_method se aplica tanto a mode como a average. |
focus |
string | Ubicación del punto en el rectángulo delimitador de la persona usado para calcular los eventos. El valor del foco puede ser footprint (la superficie de la persona), bottom_center (la parte inferior central del rectángulo delimitador de la persona) o center (el centro del cuadro delimitador de la persona). |
Configuración de spatialanalysis
A continuación se muestra un ejemplo una entrada JSON para el parámetro SPACEANALYTICS_CONFIG que configura una línea y zona para cognitiveservices.vision.spatialanalysis. Puede configurar varias líneas o zonas para esta operación y cada línea o zona puede tener eventos diferentes.
{
"lines": [
{
"name": "doorcamera",
"line": {
"start": {
"x": 0,
"y": 0.5
},
"end": {
"x": 1,
"y": 0.5
}
},
"events": [
{
"type": "linecrossing",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
],
"zones": [
{
"name": "lobbycamera",
"polygon": [[0.3, 0.3],[0.3, 0.9],[0.6, 0.9],[0.6, 0.3],[0.3, 0.3]],
"events": [
{
"type": "persondistance",
"config": {
"trigger": "event",
"output_frequency": 1,
"minimum_distance_threshold": 6.0,
"maximum_distance_threshold": 35.0,
"focus": "footprint"
}
},
{
"type": "count",
"config": {
"trigger": "event",
"output_frequency": 1,
"focus": "footprint"
}
},
{
"type": "zonecrossing",
"config": {
"focus": "footprint"
}
},
{
"type": "zonedwelltime",
"config": {
"focus": "footprint"
}
}
]
}
]
}
Configuración de la cámara
Consulte las instrucciones de la colocación de la cámara para más información sobre cómo configurar zonas y líneas.
Salida de la operación de análisis espacial
Los eventos de cada operación se emiten a Azure IoT Hub en formato JSON.
Formato JSON para personcount AI Insights
JSON de ejemplo de un evento generado por esta operación.
{
"events": [
{
"id": "b013c2059577418caa826844223bb50b",
"type": "personCountEvent",
"detectionIds": [
"bc796b0fc2534bc59f13138af3dd7027",
"60add228e5274158897c135905b5a019"
],
"properties": {
"personCount": 2
},
"zone": "lobbycamera",
"trigger": "event"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:06:57.224Z",
"width": 608,
"height": 342,
"frameId": "1400",
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 10.306597709655762,
"focalLength": 385.3199462890625,
"tiltupAngle": 1.0969393253326416
},
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "bc796b0fc2534bc59f13138af3dd7027",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.612683747944079,
"y": 0.25340268765276636
},
{
"x": 0.7185954043739721,
"y": 0.6425260577285499
}
]
},
"confidence": 0.9559211134910583,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "0.0",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
},
{
"type": "person",
"id": "60add228e5274158897c135905b5a019",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.22326200886776573,
"y": 0.17830915618361087
},
{
"x": 0.34922296122500773,
"y": 0.6297955429344847
}
]
},
"confidence": 0.9389744400978088,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
| Nombre de campo de evento | Tipo | Description |
|---|---|---|
id |
string | Id. de evento |
type |
string | Tipo de evento |
detectionsId |
array | Matriz de tamaño 1 del identificador único de la detección de personas que desencadenó este evento |
properties |
collection | Colección de valores |
trackinId |
string | Identificador único de la persona detectada |
zone |
string | Campo "name" del polígono que representa la zona que se cruzó |
trigger |
string | El tipo de desencadenador es "event" o "interval" en función del valor de trigger en SPACEANALYTICS_CONFIG |
| Nombre del campo de detecciones | Tipo | Description |
|---|---|---|
id |
string | Id. de detección |
type |
string | Tipo de detección |
region |
collection | Colección de valores |
type |
string | Tipo de región |
points |
collection | Puntos superior izquierdo e inferior derecho cuando el tipo de región es RECTANGLE (RECTÁNGULO) |
confidence |
FLOAT | Confianza del algoritmo |
attributes |
array | Matriz de atributos. Cada atributo consta de etiqueta, tarea y confianza. |
label |
string | El valor del atributo (por ejemplo, {label: face_mask} indica que la persona detectada lleva una mascarilla). |
confidence (attribute) |
FLOAT | El valor de confianza del atributo, en el intervalo de 0 a 1 (por ejemplo, {confidence: 0.9, label: face_nomask} indica que la persona detectada no lleva una mascarilla). |
task |
string | La tarea o clase de clasificación de atributos. |
| Nombre del campo SourceInfo | Tipo | Description |
|---|---|---|
id |
string | Camera ID (Identificador de la cámara) |
timestamp |
Fecha | Fecha UTC cuando se emitió la carga de JSON |
width |
int | Ancho del fotograma de vídeo |
height |
int | Alto del fotograma de vídeo |
frameId |
int | Identificador del fotograma |
cameraCallibrationInfo |
collection | Colección de valores |
status |
string | Estado de la calibración en el formato de state[;progress description]. El estado puede ser Calibrating, Recalibrating (si está habilitada la recalibración) o Calibrated. La parte de descripción del progreso solo es válida cuando está en estado Calibrating y Recalibrating, y se usa para mostrar el progreso del proceso de calibración actual. |
cameraHeight |
FLOAT | Alto de la cámara sobre el suelo en pies. Se deduce a partir de la calibración automática. |
focalLength |
FLOAT | Longitud focal de la cámara en píxeles. Se deduce a partir de la calibración automática. |
tiltUpAngle |
FLOAT | Ángulo de inclinación de la cámara desde el vertical. Se deduce a partir de la calibración automática. |
Formato JSON para personcrossingline AI Insights
Ejemplo de JSON para las detecciones generadas por esta operación.
{
"events": [
{
"id": "3733eb36935e4d73800a9cf36185d5a2",
"type": "personLineEvent",
"detectionIds": [
"90d55bfc64c54bfd98226697ad8445ca"
],
"properties": {
"trackingId": "90d55bfc64c54bfd98226697ad8445ca",
"status": "CrossLeft"
},
"zone": "doorcamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:06:53.261Z",
"width": 608,
"height": 342,
"frameId": "1340",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "90d55bfc64c54bfd98226697ad8445ca",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.491627341822574,
"y": 0.2385801348769874
},
{
"x": 0.588894994635331,
"y": 0.6395559924387793
}
]
},
"confidence": 0.9005028605461121,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"trackingId": "90d55bfc64c54bfd98226697ad8445ca",
"speed": "1.2",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
| Nombre de campo de evento | Tipo | Description |
|---|---|---|
id |
string | Id. de evento |
type |
string | Tipo de evento |
detectionsId |
array | Matriz de tamaño 1 del identificador único de la detección de personas que desencadenó este evento |
properties |
collection | Colección de valores |
trackinId |
string | Identificador único de la persona detectada |
status |
string | Dirección de los cruces de líneas, ya sea "CrossLeft" o "CrossRight" La dirección se basa en imaginarse de pie en el "inicio" de cara al "final" de la línea. CrossRight cruza de izquierda a derecha. CrossLeft cruza de derecha a izquierda. |
orientationDirection |
string | La dirección de orientación de la persona detectada después de cruzar la línea. El valor puede ser "Left", "Right" o "Straight". Este valor se genera si enable_orientation se establece en True en CAMERACALIBRATOR_NODE_CONFIG |
zone |
string | Campo "name" de la línea que se cruzó |
| Nombre del campo de detecciones | Tipo | Description |
|---|---|---|
id |
string | Id. de detección |
type |
string | Tipo de detección |
region |
collection | Colección de valores |
type |
string | Tipo de región |
points |
collection | Puntos superior izquierdo e inferior derecho cuando el tipo de región es RECTANGLE (RECTÁNGULO) |
groundOrientationAngle |
FLOAT | Ángulo, en radianes, en el sentido de las agujas reloj de la orientación de la persona del plano del suelo inferido |
mappedImageOrientation |
FLOAT | Ángulo proyectado, en radianes, en el sentido de las agujas del reloj de la orientación de la persona en el espacio de imágenes 2D |
speed |
FLOAT | Velocidad estimada de la persona detectada. La unidad es foot per second (ft/s) |
confidence |
FLOAT | Confianza del algoritmo |
attributes |
array | Matriz de atributos. Cada atributo consta de etiqueta, tarea y confianza. |
label |
string | El valor del atributo (por ejemplo, {label: face_mask} indica que la persona detectada lleva una mascarilla). |
confidence (attribute) |
FLOAT | El valor de confianza del atributo, en el intervalo de 0 a 1 (por ejemplo, {confidence: 0.9, label: face_nomask} indica que la persona detectada no lleva una mascarilla). |
task |
string | La tarea o clase de clasificación de atributos. |
| Nombre del campo SourceInfo | Tipo | Description |
|---|---|---|
id |
string | Camera ID (Identificador de la cámara) |
timestamp |
Fecha | Fecha UTC cuando se emitió la carga de JSON |
width |
int | Ancho del fotograma de vídeo |
height |
int | Alto del fotograma de vídeo |
frameId |
int | Identificador del fotograma |
Importante
El modelo de IA detecta a una persona independientemente de si el rostro de la persona está frente a la cámara o no. El modelo de IA no ejecuta el reconocimiento facial y no emite información biométrica alguna.
Formato JSON para personcrossingpolygon AI Insights
Ejemplo JSON de las detecciones generadas por esta operación con el tipo zonecrossing SPACEANALYTICS_CONFIG.
{
"events": [
{
"id": "f095d6fe8cfb4ffaa8c934882fb257a5",
"type": "personZoneEnterExitEvent",
"detectionIds": [
"afcc2e2a32a6480288e24381f9c5d00e"
],
"properties": {
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"status": "Enter",
"side": "1"
},
"zone": "queuecamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:15:09.680Z",
"width": 608,
"height": 342,
"frameId": "428",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "afcc2e2a32a6480288e24381f9c5d00e",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.8135572734631991,
"y": 0.6653949670624315
},
{
"x": 0.9937645761590255,
"y": 0.9925406829655519
}
]
},
"confidence": 0.6267998814582825,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"speed": "1.2",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
Ejemplo JSON de las detecciones generadas por esta operación con el tipo zonedwelltime SPACEANALYTICS_CONFIG.
{
"events": [
{
"id": "f095d6fe8cfb4ffaa8c934882fb257a5",
"type": "personZoneDwellTimeEvent",
"detectionIds": [
"afcc2e2a32a6480288e24381f9c5d00e"
],
"properties": {
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"status": "Exit",
"side": "1",
"dwellTime": 7132.0,
"dwellFrames": 20
},
"zone": "queuecamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:15:09.680Z",
"width": 608,
"height": 342,
"frameId": "428",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "afcc2e2a32a6480288e24381f9c5d00e",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.8135572734631991,
"y": 0.6653949670624315
},
{
"x": 0.9937645761590255,
"y": 0.9925406829655519
}
]
},
"confidence": 0.6267998814582825,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.2",
"mappedImageOrientation": "0.3",
"speed": "1.2",
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
}
],
"schemaVersion": "2.0"
}
| Nombre de campo de evento | Tipo | Description |
|---|---|---|
id |
string | Id. de evento |
type |
string | Tipo de evento. El valor puede ser personZoneDwellTimeEvent o personZoneEnterExitEvent. |
detectionsId |
array | Matriz de tamaño 1 del identificador único de la detección de personas que desencadenó este evento |
properties |
collection | Colección de valores |
trackinId |
string | Identificador único de la persona detectada |
status |
string | Dirección de los cruces de los polígonos, ya sea "Enter" "Exit" |
side |
int | Número del lado del polígono que cruzó la persona. Cada lado es un borde numerado entre los dos vértices del polígono que representa la zona. La arista entre los dos primeros vértices del polígono representa el primer lado. El "lado" está vacío cuando el evento no está asociado a un lado específico debido a una oclusión. Por ejemplo, se produjo una salida al desaparecer una persona, pero no se la ve cruzar un lado de la zona, o bien se produjo una entrada al aparecer una persona en la zona, pero no se la vio cruzar un lado. |
dwellTime |
FLOAT | El número de milisegundos que representa el tiempo que la persona pasó en la zona. Este campo se proporciona cuando el tipo de evento es personZoneDwellTimeEvent. |
dwellFrames |
int | El número de fotogramas que la persona estuvo en la zona. Este campo se proporciona cuando el tipo de evento es personZoneDwellTimeEvent. |
dwellTimeForTargetSide |
FLOAT | El número de milisegundos que representa el tiempo que la persona pasó en la zona y estuvo mirando a target_side. Este campo se proporciona cuando enable_orientation tiene el valor True en CAMERACALIBRATOR_NODE_CONFIG y el valor de target_side se establece en SPACEANALYTICS_CONFIG |
avgSpeed |
FLOAT | La velocidad media de la persona en la zona. La unidad es foot per second (ft/s) |
minSpeed |
FLOAT | La velocidad mínima de la persona en la zona. La unidad es foot per second (ft/s) |
zone |
string | Campo "name" del polígono que representa la zona que se cruzó |
| Nombre del campo de detecciones | Tipo | Description |
|---|---|---|
id |
string | Id. de detección |
type |
string | Tipo de detección |
region |
collection | Colección de valores |
type |
string | Tipo de región |
points |
collection | Puntos superior izquierdo e inferior derecho cuando el tipo de región es RECTANGLE (RECTÁNGULO) |
groundOrientationAngle |
FLOAT | Ángulo, en radianes, en el sentido de las agujas reloj de la orientación de la persona del plano del suelo inferido |
mappedImageOrientation |
FLOAT | Ángulo proyectado, en radianes, en el sentido de las agujas del reloj de la orientación de la persona en el espacio de imágenes 2D |
speed |
FLOAT | Velocidad estimada de la persona detectada. La unidad es foot per second (ft/s) |
confidence |
FLOAT | Confianza del algoritmo |
attributes |
array | Matriz de atributos. Cada atributo consta de etiqueta, tarea y confianza. |
label |
string | El valor del atributo (por ejemplo, {label: face_mask} indica que la persona detectada lleva una mascarilla). |
confidence (attribute) |
FLOAT | El valor de confianza del atributo, en el intervalo de 0 a 1 (por ejemplo, {confidence: 0.9, label: face_nomask} indica que la persona detectada no lleva una mascarilla). |
task |
string | La tarea o clase de clasificación de atributos. |
Formato JSON para persondistance AI Insights
Ejemplo de JSON para las detecciones generadas por esta operación.
{
"events": [
{
"id": "9c15619926ef417aa93c1faf00717d36",
"type": "personDistanceEvent",
"detectionIds": [
"9037c65fa3b74070869ee5110fcd23ca",
"7ad7f43fd1a64971ae1a30dbeeffc38a"
],
"properties": {
"personCount": 5,
"averageDistance": 20.807043981552123,
"minimumDistanceThreshold": 6.0,
"maximumDistanceThreshold": "Infinity",
"eventName": "TooClose",
"distanceViolationPersonCount": 2
},
"zone": "lobbycamera",
"trigger": "event"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:17:25.309Z",
"width": 608,
"height": 342,
"frameId": "1199",
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 12.9940824508667,
"focalLength": 401.2800598144531,
"tiltupAngle": 1.057669997215271
},
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "9037c65fa3b74070869ee5110fcd23ca",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.39988183975219727,
"y": 0.2719132942065858
},
{
"x": 0.5051516984638414,
"y": 0.6488402517218339
}
]
},
"confidence": 0.948630690574646,
"metadata": {
"centerGroundPointX": "-1.4638760089874268",
"centerGroundPointY": "18.29732322692871",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
},
{
"type": "person",
"id": "7ad7f43fd1a64971ae1a30dbeeffc38a",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.5200299714740954,
"y": 0.2875368218672903
},
{
"x": 0.6457497446160567,
"y": 0.6183311060855263
}
]
},
"confidence": 0.8235412240028381,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
}
],
"schemaVersion": "2.0"
}
| Nombre de campo de evento | Tipo | Description |
|---|---|---|
id |
string | Id. de evento |
type |
string | Tipo de evento |
detectionsId |
array | Matriz de tamaño 1 del identificador único de la detección de personas que desencadenó este evento |
properties |
collection | Colección de valores |
personCount |
int | Número de personas detectadas cuando se emitió el evento |
averageDistance |
FLOAT | Distancia promedio en pies entre todas las personas detectadas |
minimumDistanceThreshold |
FLOAT | Distancia en pies que desencadenará un evento "TooClose" cuando las personas estén más cerca de esa distancia entre sí. |
maximumDistanceThreshold |
FLOAT | Distancia en pies que desencadenará un evento "TooFar" cuando las personas estén más lejos de esa distancia entre sí. |
eventName |
string | El nombre de evento es TooClose cuando se infringe minimumDistanceThreshold, TooFar cuando se infringe maximumDistanceThreshold o unknown cuando la calibración automática no ha finalizado. |
distanceViolationPersonCount |
int | Número de personas detectadas en infracción de minimumDistanceThreshold o maximumDistanceThreshold |
zone |
string | Campo "name" del polígono que representa la zona en la que se supervisó la distancia entre las personas |
trigger |
string | El tipo de desencadenador es "event" o "interval" en función del valor de trigger en SPACEANALYTICS_CONFIG |
| Nombre del campo de detecciones | Tipo | Description |
|---|---|---|
id |
string | Id. de detección |
type |
string | Tipo de detección |
region |
collection | Colección de valores |
type |
string | Tipo de región |
points |
collection | Puntos superior izquierdo e inferior derecho cuando el tipo de región es RECTANGLE (RECTÁNGULO) |
confidence |
FLOAT | Confianza del algoritmo |
centerGroundPointX/centerGroundPointY |
2 valores flotantes | Valores x, y con las coordenadas de la ubicación deducida de la persona en el suelo, en pies. x y y son coordenadas en el plano del suelo, suponiendo que el suelo sea el nivel. La ubicación de la cámara es el origen. |
En centerGroundPoint, x es el componente de la distancia entre la cámara y la persona que está en el plano de imagen de la cámara. y es el componente de la distancia que es paralela al plano de imagen de la cámara.
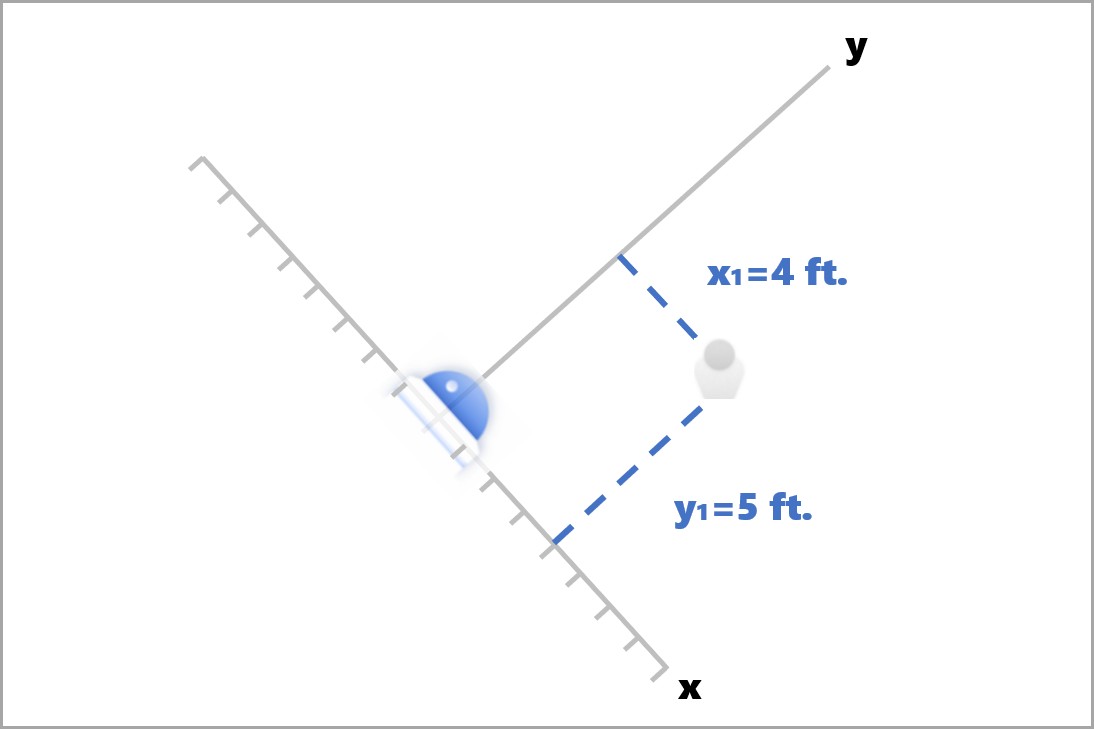
En este ejemplo centerGroundPoint es {centerGroundPointX: 4, centerGroundPointY: 5}. Esto significa que hay una persona a un metro y medio por delante de la cámara y a metro y medio por la derecha, mirando la habitación de arriba abajo.
| Nombre del campo SourceInfo | Tipo | Description |
|---|---|---|
id |
string | Camera ID (Identificador de la cámara) |
timestamp |
Fecha | Fecha UTC cuando se emitió la carga de JSON |
width |
int | Ancho del fotograma de vídeo |
height |
int | Alto del fotograma de vídeo |
frameId |
int | Identificador del fotograma |
cameraCallibrationInfo |
collection | Colección de valores |
status |
string | Estado de la calibración en el formato de state[;progress description]. El estado puede ser Calibrating, Recalibrating (si está habilitada la recalibración) o Calibrated. La parte de descripción del progreso solo es válida cuando está en estado Calibrating y Recalibrating, y se usa para mostrar el progreso del proceso de calibración actual. |
cameraHeight |
FLOAT | Alto de la cámara sobre el suelo en pies. Se deduce a partir de la calibración automática. |
focalLength |
FLOAT | Longitud focal de la cámara en píxeles. Se deduce a partir de la calibración automática. |
tiltUpAngle |
FLOAT | Ángulo de inclinación de la cámara desde el vertical. Se deduce a partir de la calibración automática. |
Formato JSON para spatialanalysis AI Insights
La salida de esta operación depende del elemento events configurado. Por ejemplo, si hay un evento zonecrossing configurado para esta operación, la salida será la misma que la de cognitiveservices.vision.spatialanalysis-personcrossingpolygon.
Uso de la salida generada por el contenedor
Puede que quiera integrar eventos o la detección del análisis espacial en la aplicación. Estos son algunos de los enfoques que se deben tener en cuenta:
- Use el SDK de Azure Event Hubs del lenguaje de programación elegido para conectarse al punto de conexión de Azure IoT Hub y recibir los eventos. Para más información, consulte Leer mensajes del dispositivo a la nube desde el punto de conexión integrado.
- Configure Enrutamiento de mensajes en la instancia de Azure IoT Hub para enviar los eventos a otros puntos de conexión o guardar los eventos en el almacenamiento de datos. Para más información, consulte Enrutamiento de mensajes de IoT Hub.
- Configure un trabajo de Azure Stream Analytics para procesar los eventos en tiempo real a medida que llegan y crear visualizaciones.
Implementación de operaciones de análisis espacial a escala (varias cámaras)
Con el fin de obtener el mejor rendimiento y uso de las GPU, puede implementar cualquier operación de análisis espacial en varias cámaras mediante instancias de grafos. A continuación se muestra una configuración de ejemplo para ejecutar la operación cognitiveservices.vision.spatialanalysis-personcrossingline en 15 cámaras.
"properties.desired": {
"globalSettings": {
"PlatformTelemetryEnabled": false,
"CustomerTelemetryEnabled": true
},
"graphs": {
"personzonelinecrossing": {
"operationId": "cognitiveservices.vision.spatialanalysis-personcrossingline",
"version": 1,
"enabled": true,
"sharedNodes": {
"shared_detector0": {
"node": "PersonCrossingLineGraph.detector",
"parameters": {
"DETECTOR_NODE_CONFIG": "{ \"gpu_index\": 0, \"batch_size\": 7, \"do_calibration\": true}",
}
},
"shared_calibrator0": {
"node": "PersonCrossingLineGraph/cameracalibrator",
"parameters": {
"CAMERACALIBRATOR_NODE_CONFIG": "{ \"gpu_index\": 0, \"do_calibration\": true, \"enable_zone_placement\": true}",
"CALIBRATION_CONFIG": "{\"enable_recalibration\": true, \"quality_check_frequency_seconds\": 86400}",
}
},
"parameters": {
"VIDEO_DECODE_GPU_INDEX": 0,
"VIDEO_IS_LIVE": true
},
"instances": {
"1": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 1>",
"VIDEO_SOURCE_ID": "camera 1",
"SPACEANALYTICS_CONFIG": "{\"zones\":[{\"name\":\"queue\",\"polygon\":[[0,0],[1,0],[0,1],[1,1],[0,0]]}]}"
}
},
"2": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 2>",
"VIDEO_SOURCE_ID": "camera 2",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"3": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 3>",
"VIDEO_SOURCE_ID": "camera 3",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"4": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 4>",
"VIDEO_SOURCE_ID": "camera 4",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"5": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 5>",
"VIDEO_SOURCE_ID": "camera 5",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"6": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 6>",
"VIDEO_SOURCE_ID": "camera 6",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"7": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 7>",
"VIDEO_SOURCE_ID": "camera 7",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"8": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 8>",
"VIDEO_SOURCE_ID": "camera 8",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"9": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 9>",
"VIDEO_SOURCE_ID": "camera 9",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"10": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 10>",
"VIDEO_SOURCE_ID": "camera 10",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"11": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 11>",
"VIDEO_SOURCE_ID": "camera 11",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"12": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 12>",
"VIDEO_SOURCE_ID": "camera 12",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"13": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 13>",
"VIDEO_SOURCE_ID": "camera 13",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"14": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 14>",
"VIDEO_SOURCE_ID": "camera 14",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"15": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 15>",
"VIDEO_SOURCE_ID": "camera 15",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
}
}
},
}
}
| Nombre | Tipo | Descripción |
|---|---|---|
batch_size |
int | Si todas las cámaras tienen la misma resolución, establezca batch_size en el número de cámaras que se utilizarán en esa operación; de lo contrario, establezca batch_size en 1 o déjelo como predeterminado (1), lo que indica que no se admite ningún lote. |