Método Matrix3x2F::Translation(FLOAT,FLOAT) (d2d1helper.h)
Crea una transformación de traducción que tiene los desplazamientos x e y especificados.
Sintaxis
Matrix3x2F Translation(
FLOAT x,
FLOAT y
);
Parámetros
x
Tipo: FLOAT
Distancia que se va a traducir a lo largo del eje X.
y
Tipo: FLOAT
Distancia que se va a traducir a lo largo del eje Y.
Valor devuelto
Tipo: Matrix3x2F
Matriz de transformación que traduce un objeto a la distancia horizontal y vertical especificada.
Comentarios
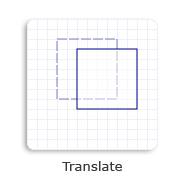
La traducción es una transformación afín, que mueve cada punto por una distancia fija en la misma dirección. Es similar a cambiar el origen del espacio de coordenadas. Puede traducir un objeto a lo largo del eje X, el eje Y o ambos.
Al llamar a este método, especifique los desplazamientos x e y. Si prefiere definir ambos desplazamientos en un par ordenado mediante la estructura D2D1_SIZE_F , llame al otro método Translation . En la ilustración siguiente se muestra un cuadrado movido de 20 píxeles a la derecha a lo largo del eje X y 10 píxeles hacia abajo a lo largo del eje Y.
 Para obtener un ejemplo, vea Cómo traducir un objeto.
Para obtener un ejemplo, vea Cómo traducir un objeto.
Requisitos
| Requisito | Value |
|---|---|
| Cliente mínimo compatible | Windows 7, Windows Vista con SP2 y Platform Update para Windows Vista [aplicaciones de escritorio | Aplicaciones para UWP] |
| Servidor mínimo compatible | Windows Server 2008 R2, Windows Server 2008 con SP2 y Actualización de plataforma para Windows Server 2008 [aplicaciones de escritorio | Aplicaciones para UWP] |
| Plataforma de destino | Windows |
| Encabezado | d2d1helper.h |
| Library | D2d1.lib |
| Archivo DLL | D2d1.dll |