Función D3DXMatrixRotationYawPitchRoll (D3dx9math.h)
Nota
La biblioteca de utilidades D3DX está en desuso. Se recomienda usar DirectXMath en su lugar.
Crea una matriz con un eje, una inclinación y un rollo especificados.
Sintaxis
D3DXMATRIX* D3DXMatrixRotationYawPitchRoll(
_Inout_ D3DXMATRIX *pOut,
_In_ FLOAT Yaw,
_In_ FLOAT Pitch,
_In_ FLOAT Roll
);
Parámetros
-
pOut [in, out]
-
Tipo: D3DXMATRIX*
Puntero a la estructura D3DXMATRIX que es el resultado de la operación.
-
Yaw [in]
-
Tipo: FLOAT
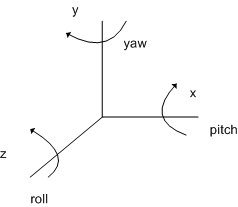
Girar alrededor del eje Y, en radianes.
-
Pitch [in]
-
Tipo: FLOAT
Inclinación alrededor del eje X, en radianes.
-
Roll [in]
-
Tipo: FLOAT
Rodar alrededor del eje z, en radianes.
Valor devuelto
Tipo: D3DXMATRIX*
Puntero a una estructura D3DXMATRIX con el eje, el tono y el rollo especificados.
Observaciones
El valor devuelto de esta función es el mismo valor devuelto en el parámetro pOut . De este modo, la función D3DXMatrixRotationYawPitchRoll se puede usar como parámetro para otra función.
El orden de las transformaciones se pone primero en marcha, luego se inclina y, a continuación, yaw. En relación con el eje de coordenadas local del objeto, esto equivale a la rotación alrededor del eje Z, seguida de la rotación alrededor del eje X, seguida de la rotación alrededor del eje Y, como se muestra en la ilustración siguiente.
Requisitos
| Requisito | Value |
|---|---|
| Encabezado |
|
| Biblioteca |
|
Consulte también
Comentarios
Próximamente: A lo largo de 2024 iremos eliminando gradualmente GitHub Issues como mecanismo de comentarios sobre el contenido y lo sustituiremos por un nuevo sistema de comentarios. Para más información, vea: https://aka.ms/ContentUserFeedback.
Enviar y ver comentarios de