Spécifications matérielles pour Azure Kinect DK
Cet article fournit des informations sur la façon dont le matériel Azure Kinect intègre la toute dernière technologie de capteur de Microsoft dans un accessoire connecté par USB.
Termes
Les abréviations suivantes seront utilisées tout au long de cet article.
- NFOV (mode de profondeur à champ de vision étroit)
- WFOV (mode de profondeur à champ de vision large)
- FOV (champ de vision)
- FPS (images par seconde)
- IMU (unité de mesure inertielle)
- FoI (champ d’intérêt)
Dimensions et poids du produit
Le poids et les dimensions de l’appareil Azure Kinect sont les suivants.
- Dimensions : 103 x 39 x 126 mm
- Poids : 440 g
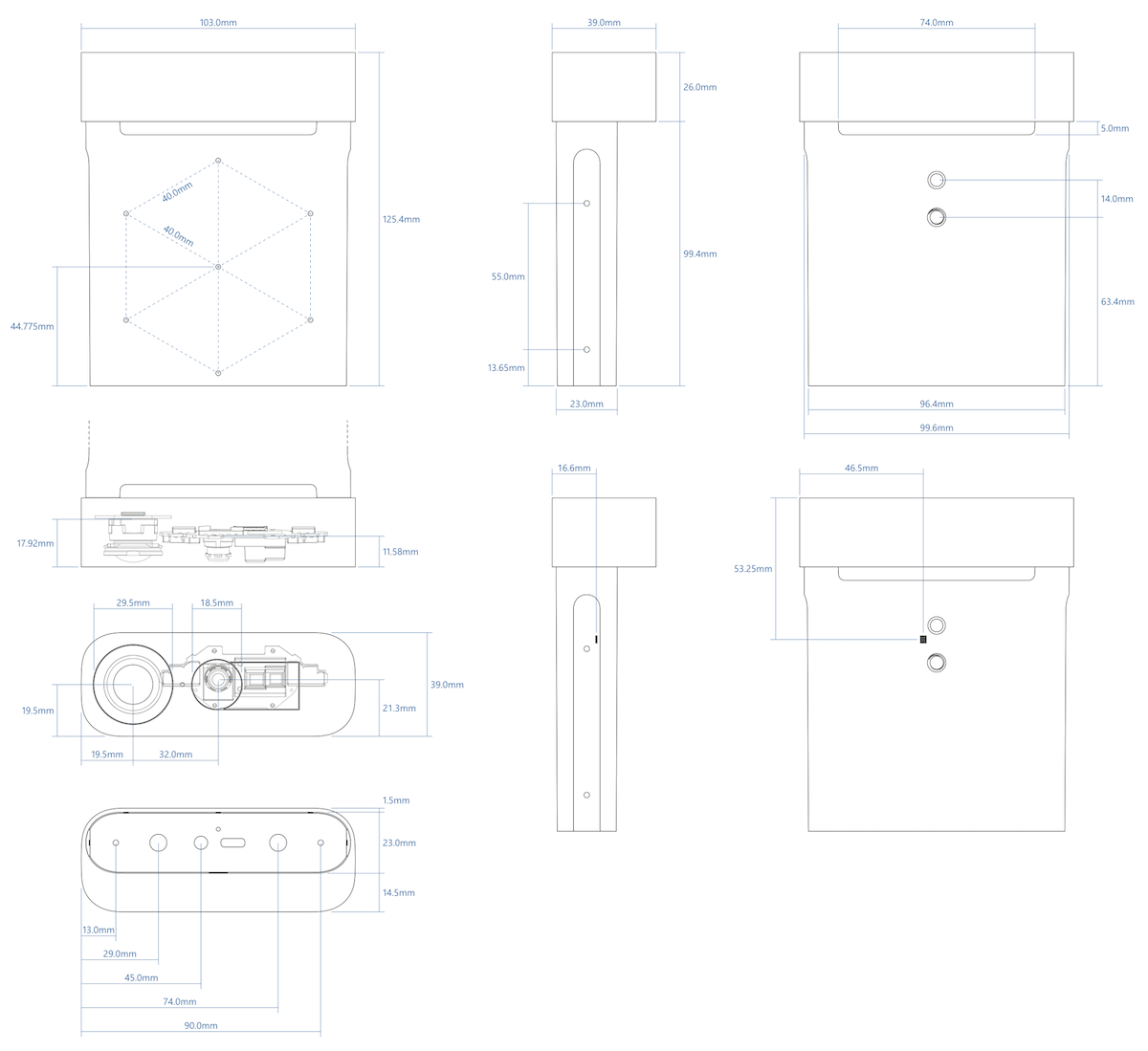
Un fichier STEP pour l’appareil Azure Kinect est disponible ici.
Environnement d’exploitation
Azure Kinect DK est destiné aux développeurs et aux entreprises commerciales disposant des conditions ambiantes suivantes :
- Température : 10-25°C
- Humidité : 8 à 90 % d’humidité relative (sans condensation)
Notes
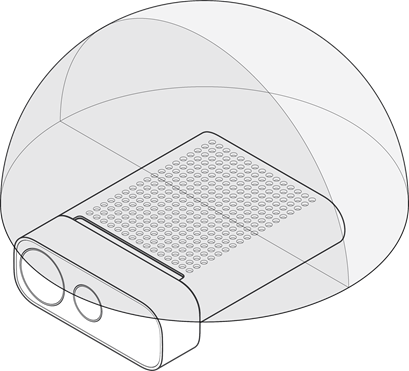
L’utilisation de cet appareil dans des conditions ambiantes autres que celles-ci peut provoquer la panne de l’appareil ou un fonctionnement anormal. Ces conditions ambiantes sont applicables à l’environnement immédiat de l’appareil, quelles que soient les conditions opérationnelles. Lorsque l’appareil est utilisé avec un boîtier externe, il est recommandé d’utiliser une solution de contrôle actif de la température et/ou d’autres solutions de refroidissement afin de garantir le maintien de la température dans les plages indiquées. L’appareil comprend un canal de refroidissement situé entre la section avant et la section arrière. Lorsque vous utilisez l’appareil, vérifiez que le canal de refroidissement n’est pas obstrué.
Reportez-vous aux informations de sécurité supplémentaires sur le produit.
Modes de fonctionnement pris en charge pour la caméra à profondeur de champ
Azure Kinect DK comprend une caméra à profondeur de champ ToF 1 Mpx conçue par Microsoft qui utilise le capteur d’images présenté lors de la conférence ISSCC 2018. La caméra à profondeur de champ prend en charge les modes indiqués ci-dessous :
| Mode | Résolution | FoI | i/s | Plage de fonctionnement* | Temps d’exposition |
|---|---|---|---|---|---|
| NFOV sans compartimentation | 640 x 576 | 75°x°65 | 0, 5, 15, 30 | 0,5 - 3,86 m | 12,8 ms |
| NFOV 2x2 avec compartimentation (SW) | 320 x 288 | 75°x°65 | 0, 5, 15, 30 | 0,5 - 5,46 m | 12,8 ms |
| WFOV 2x2 avec compartimentation | 512 x 512 | 120°x°120 | 0, 5, 15, 30 | 0,25 - 2,88 m | 12,8 ms |
| WFOV sans compartimentation | 1024 x 1024 | 120°x°120 | 0, 5, 15 | 0,25 - 2,21 m | 20,3 ms |
| Infrarouge passif | 1024 x 1024 | N/A | 0, 5, 15, 30 | N/A | 1,6 ms |
Réflectivité de 15 à 95 % à 850 nm, 2,2 μW/cm2/nm, erreur aléatoire écart type. ≤ 17 mm, erreur systématique typique < 11 mm + 0,1 % de la distance sans interférence multichemin. Une profondeur peut être fournie en dehors de la plage de fonctionnement indiquée ci-dessus. Elle dépend de la réflectivité d’un objet.
Modes de fonctionnement pris en charge pour la caméra couleur
Azure Kinect DK comprend un capteur CMOS OV12A10 12 Mpx avec obturateur roulant. Les modes de fonctionnement natifs sont listé ci-dessous :
| Résolution de la caméra RVB (H x V) | Proportions | Options de format | Fréquence d’images (FPS) | FOV nominal (H x V) (après traitement) |
|---|---|---|---|---|
| 3 840 x 2 160 | 16:9 | MJPEG | 0, 5, 15, 30 | 90°x°59 |
| 2 560 x 1 440 | 16:9 | MJPEG | 0, 5, 15, 30 | 90°x°59 |
| 1 920 x 1 080 | 16:9 | MJPEG | 0, 5, 15, 30 | 90°x°59 |
| 1 280 x 720 | 16:9 | MJPEG/YUY2/NV12 | 0, 5, 15, 30 | 90°x°59 |
| 4 096 x 3 072 | 4:3 | MJPEG | 0, 5, 15 | 90°x°74,3 |
| 2 048 x 1 536 | 4:3 | MJPEG | 0, 5, 15, 30 | 90°x°74,3 |
La caméra RVB est compatible avec les classes vidéo USB et peut être utilisée sans le SDK du capteur. Espace colorimétrique de la caméra RVB : plage complète BT.601 [0..255]. Le sous-échantillonnage de la chrominance MJPEG est 4:2:2.
Notes
Le SDK du capteur peut fournir des images en couleurs au format de pixel BVRA. Ce mode n’est pas pris en charge par l’appareil et provoque une charge processeur supplémentaire lorsqu’il est utilisé. Le processeur hôte est utilisé pour convertir les images MJPEG reçues de l’appareil.
Valeurs de temps d’exposition de la caméra RVB
Vous trouverez ci-dessous les valeurs d’exposition manuelle qui sont acceptées pour la caméra RVB :
| exp | 2^exp | 50 Hz | 60 Hz |
|---|---|---|---|
| -11 | 488 | 500 | 500 |
| -10 | 977 | 1250 | 1250 |
| -9 | 1953 | 2 500 | 2 500 |
| -8 | 3906 | 10000 | 8330 |
| -7 | 7813 | 20000 | 16670 |
| -6 | 15625 | 30000 | 33330 |
| -5 | 31250 | 40000 | 41670 |
| -4 | 62500 | 50000 | 50000 |
| -3 | 125000 | 60000 | 66670 |
| -2 | 250 000 | 80000 | 83330 |
| -1 | 500000 | 100000 | 100000 |
| 0 | 1000000 | 120 000 | 116670 |
| 1 | 2000000 | 130000 | 133330 |
Minutage brut du capteur de profondeur
| Mode de profondeur | IR Impulsions |
d’impulsion Largeur |
Idle Points |
Durée d’inactivité | Exposition : Temps |
|---|---|---|---|---|---|
| NFOV sans compartimentation NFOV 2xx avec compartimentation WFOV 2x2 avec compartimentation |
9 | 125 us | 8 | 1 450 us | 12,8 ms |
| WFOV sans compartimentation | 9 | 125 us | 8 | 2 390 us | 20,3 ms |
Champ de vision de la caméra
L’image suivante montre la profondeur et le champ de vision de la caméra RVB, ou les angles que les capteurs « voient ». Ce diagramme montre la caméra RVB en mode 4:3.
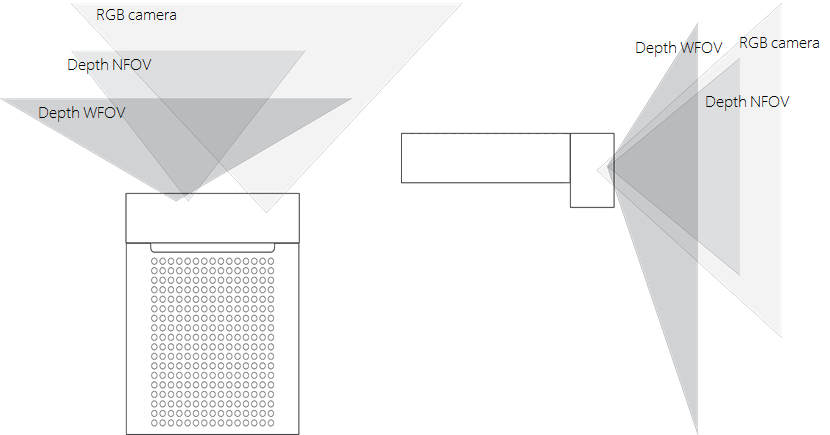
Cette image montre le champ de vision de la caméra, vu de devant à une distance de 2 000 mm.
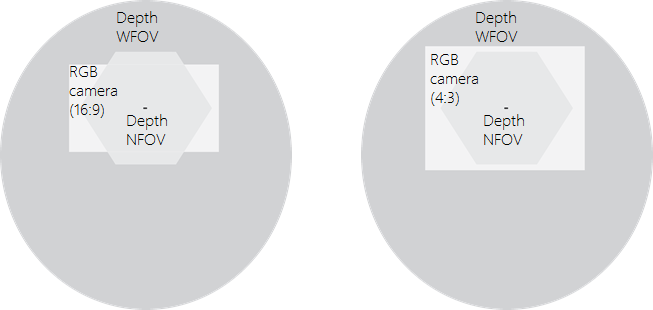
Notes
Lorsque la profondeur est en mode NFOV, la caméra RVB dispose d’un meilleur chevauchement des pixels avec une résolution 4:3 qu’avec une résolution 16:9.
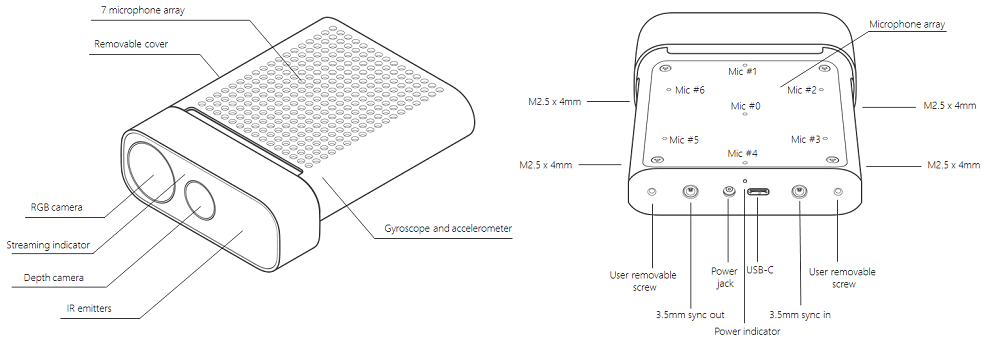
Capteur de mouvement (IMU)
L’unité de mesure inertielle (IMU) incorporée est un LSM6DSMUS qui comprend un accéléromètre et un gyroscope. L’accéléromètre et le gyroscope sont échantillonnés simultanément à 1,6 kHz. Les échantillons sont signalés à l’hôte à 208 Hz.
Réseau de microphones
Azure Kinect DK comprend un réseau circulaire de 7 microphones haute qualité qui correspond à un appareil de classe audio USB 2.0 standard. Vous pouvez accéder à l’ensemble des 7 canaux. Les spécifications de performances sont les suivantes :
- Sensibilité : -22 dBFS (94 dB SPL, 1 kHz)
- Rapport signal/bruit > 65 dB
- Point de surcharge acoustique : 116 dB
USB
Azure Kinect DK est un appareil composite USB3 qui expose les points de terminaison matériels suivants au système d’exploitation :
L’ID de fournisseur est 0x045E (Microsoft). La table Product ID est montrée ci-dessous :
| Interface USB | IP PNP | Notes |
|---|---|---|
| Hub USB 3.1 Gen2 | 0x097A | Hub principal |
| Hub USB 2.0 | 0x097B | HS USB |
| Caméra à profondeur de champ | 0x097C | USB 3.0 |
| Caméra couleur | 0x097D | USB 3.0 |
| Microphones | 0x097E | HS USB |
Indicateurs
L’appareil possède un voyant pour la diffusion de données de la caméra, qui est situé à l’avant et qui peut être désactivé par programmation à l’aide du SDK du capteur.
Le voyant situé à l’arrière de l’appareil indique l’état de celui-ci :
| Si le voyant est | Signification |
|---|---|
| Blanc et fixe | L’appareil est allumé et fonctionne correctement. |
| Blanc clignotant | L’appareil est allumé mais ne dispose pas d’une connexion de données USB 3.0. |
| Orange clignotant | L’appareil n’a pas suffisamment de puissance pour fonctionner. |
| Orange, puis blanc clignotant | Mise à jour du microprogramme ou récupération en cours |
Bloc d’alimentation
L’appareil peut être alimenté de deux manières :
- À l’aide du dispositif d’alimentation fourni avec l’appareil. Le connecteur d’alimentation est un OD 4,5 mm avec un ID 3,0 mm et un diamètre de broche de 0,6 mm.
- En utilisant un câble Type C vers Type C à la fois pour l’alimentation et pour les données.
L’appareil Azure Kinect DK n’est pas fourni avec un câble Type C vers Type C.
Notes
- Le câble d’alimentation fourni est un câble USB Type A vers connecteur cylindrique simple. Utilisez le dispositif d’alimentation murale fourni avec ce câble. L’appareil est capable de prendre plus d’énergie que deux ports USB Type A standard ne peuvent fournir.
- Les câbles USB sont très importants. Nous vous recommandons donc d’utiliser des câbles de haute qualité et de vérifier qu’ils fonctionnent correctement avant de déployer l’unité à distance.
Conseil
Pour sélectionner un bon câble Type C vers Type C :
- Le câble certifié USB doit prendre en charge à la fois l’alimentation et les données.
- Un câble passif doit mesurer moins de 1,5 mètre. S’il est plus long, utilisez plutôt un câble actif.
- Le câble doit prendre en charge au moins 1,5 A. Dans le cas contraire, vous devrez connecter une alimentation externe.
Vérifiez le câble :
Connectez l’appareil via le câble au PC hôte.
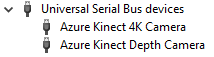
Vérifiez que tous les appareils sont énumérés correctement dans le gestionnaire de périphériques Windows. La caméra à profondeur de champ et la caméra RVB doivent s’afficher comme dans l’exemple ci-dessous.
Dans la visionneuse Azure Kinect, vérifiez que le câble peut diffuser des données de façon fiable pour tous les capteurs, avec les paramètres suivants :
- Caméra à champ de profondeur : NFOV unbinned
- Caméra RVB : 2160p
- Microphones et IMU activés
Que signifie ce voyant ?
Le voyant d’alimentation est situé à l’arrière de l’appareil Azure Kinect DK. La couleur du voyant change en fonction de l’état de l’appareil.
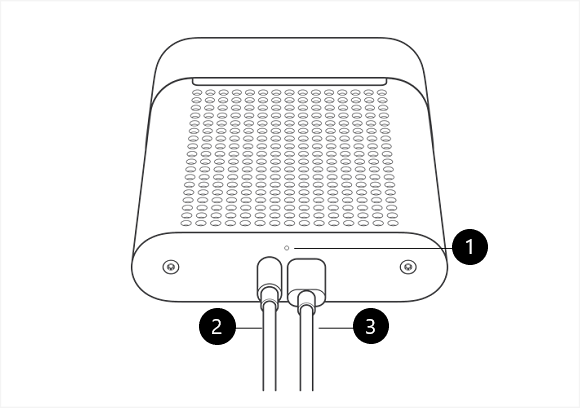
Ce schéma montre les composants suivants :
- Le voyant d’alimentation
- Le câble d’alimentation (connecté à une source d’alimentation)
- Le câble de données USB Type C (connecté au PC)
Vérifiez que les câbles sont connectés comme indiqué. Consultez ensuite le tableau suivant pour connaître les différents états du voyant d’alimentation.
| Si le voyant est : | Signification : | Vous devez : |
|---|---|---|
| Blanc et fixe | L’appareil est sous tension et fonctionne correctement. | Utiliser l’appareil. |
| Éteint | L’appareil n’est pas connecté au PC. | Vérifier que le câble du connecteur d’alimentation rond est connecté à l’appareil et à l’adaptateur secteur USB. Vérifier que le câble USB Type C est connecté à l’appareil et à votre PC. |
| Blanc clignotant | L’appareil est allumé mais ne dispose pas d’une connexion de données USB 3.0. | Vérifier que le câble du connecteur d’alimentation rond est connecté à l’appareil et à l’adaptateur secteur USB. Vérifier que le câble USB Type C est connecté à l’appareil et à un port USB 3.0 du PC. Connecter l’appareil sur un autre port USB 3.0 du PC. Sur l’ordinateur, ouvrir le Gestionnaire de périphériques (Démarrer>Panneau de configuration>Gestionnaire de périphériques) et vérifier que l’ordinateur dispose d’un contrôleur hôte USB 3.0 pris en charge. |
| Orange clignotant | L’appareil n’a pas suffisamment de puissance pour fonctionner. | Vérifier que le câble du connecteur d’alimentation rond est connecté à l’appareil et à l’adaptateur secteur USB. Vérifier que le câble USB Type C est connecté à l’appareil et à votre PC. |
| Orange, puis blanc clignotant | L’appareil est sous tension et reçoit une mise à jour du microprogramme ou restaure les paramètres d’usine. | Attendre que le voyant d’alimentation soit blanc et fixe. Pour plus d’informations, consultez Réinitialiser Azure Kinect DK. |
Consommation énergétique
Azure Kinect DK peut consommer jusqu’à 5,9 W. Toutefois, la consommation dépend du cas d’utilisation.
Étalonnage
Azure Kinect DK est étalonné en usine. Les paramètres d’étalonnage des capteurs visuels et inertiels peuvent être interrogés par programmation par le biais du SDK du capteur.
Récupération de l’appareil
Le microprogramme de l’appareil peut être réinitialisé vers le microprogramme d’origine à l’aide du bouton situé sous la vis.
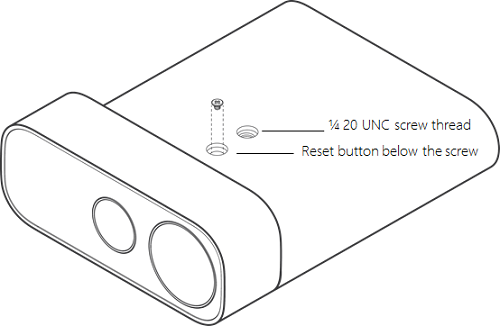
Pour effectuer une récupération de l’appareil, consultez ces instructions.
Étapes suivantes
Commentaires
Bientôt disponible : Tout au long de 2024, nous allons supprimer progressivement GitHub Issues comme mécanisme de commentaires pour le contenu et le remplacer par un nouveau système de commentaires. Pour plus d’informations, consultez https://aka.ms/ContentUserFeedback.
Envoyer et afficher des commentaires pour