Catatan
Akses ke halaman ini memerlukan otorisasi. Anda dapat mencoba masuk atau mengubah direktori.
Akses ke halaman ini memerlukan otorisasi. Anda dapat mencoba mengubah direktori.
Topik ini menyediakan instruksi dan prosedur penyiapan terperinci untuk mengukur latensi panning sentuhan sesuai dengan Sertifikasi Perangkat Keras untuk Windows 8.1. Ini mengasumsikan bahwa pembaca terbiasa dengan layar sentuh, memahami konsep latensi layar sentuh, dan memiliki pemahaman dasar tentang rekayasa listrik dan perangkat lunak.
Gambaran umum
Latensi adalah ukuran penundaan waktu yang dialami dalam sistem digitizer sentuh. Latensi sentuhan adalah waktu antara jari atau stylus (aktuator) menyentuh layar dan sistem operasi host yang menerima kontak (biasanya melalui laporan HID). Latensi panning sedikit lebih rumit karena kontak bergerak di sepanjang jalur berkelanjutan tetapi laporan tiba dalam interval waktu diskrit. Oleh karena itu, latensi panning hanya didefinisikan dalam hal interval waktu diskrit yang data sentuh yang dilaporkan tersedia. Mengukur latensi panning kemudian dikurangi untuk mengetahui penundaan waktu antara ketika sentuhan benar-benar terjadi dan ketika sistem operasi menerima peristiwa sentuhan.
Metodologi
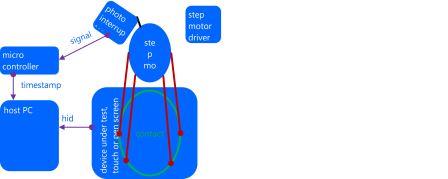
Topik ini menjelaskan pengaturan dan prosedur untuk mengukur latensi panning perangkat keras sentuh dengan menggunakan motor langkah dan pengganggu foto. Motor langkah mengendarai lengan mekanis untuk mengendarai aktuator yang mensimulasikan jari manusia. Aktuator menggambar lingkaran pada perangkat yang diuji dan sirkuit pengganggu foto mendeteksi ketika aktuator berada di titik kontrol tertentu. Informasi ini dikirim ke komputer host dengan menggunakan mikrokontroler dan aplikasi pengujian menghitung latensi berdasarkan kapan perangkat melaporkan peristiwa sentuhan dan kapan aktuator benar-benar melakukan kontak. Diagram berikut menunjukkan konsep keseluruhan.
Persyaratan perangkat keras
Bagian ini menjelaskan komponen perangkat keras yang diperlukan untuk mengukur latensi panning.
Langkah motor dan foto-interupter
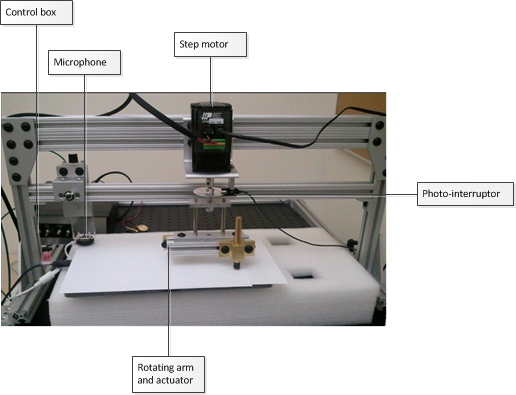
Alat pengukuran terdiri dari motor langkah, pengganggu foto, lengan berputar dan aktuator, dan kotak kontrol, yang terlihat di latar belakang gambar berikut.
Kotak kontrol memiliki tiga sakelar pengontrol dan sakelar daya.
Motor: Untuk menyalakan dan mematikan lengan motor langkah.
Kalibrasi: Tidak digunakan untuk latensi panning - matikan. (Digunakan hanya untuk latensi touch down.)
Mode: Beralih antara Tach (mengacu pada pengganggu foto yang digunakan untuk pengukuran latensi panning) dan Mikrofon (mikrofon yang digunakan untuk pengukuran latensi touch down).

Untuk pengukuran latensi panning, pengaturan awal harus sebagai berikut:
| Ganti nama | Provinsi |
|---|---|
Power |
Nonaktif |
Motor |
Nonaktif |
Mengkalibrasi |
Nonaktif |
Mode |
Tach |
Nyalakan kotak kontrol setelah Anda menyambungkan USB ke komputer. Mencolokkan USB setelah menyalakan kotak kontrol dapat mengakibatkan keadaan mikrokontroler yang tidak dapat diprediksi.
Pengaturan motor stepper
Motor stepper dapat diprogram untuk berjalan dengan berbagai cara. Secara default, motor stepper diprogram untuk berjalan dalam mode kalibrasi otomatis. (Mode ini dijelaskan secara lebih rinci di bagian "Mode kalibrasi otomatis" nanti di dokumen.) Mode kalibrasi otomatis dirancang untuk meminimalkan kesalahan kalibrasi dan variasi latensi dengan kalibrasi manual.
Selama tahap akuisisi dan pengumpulan, motor berjalan dengan kecepatan konstan 0,75 revolusi per detik. Pengaturan motor stepper yang digunakan untuk tahap akuisisi dan pengumpulan adalah sebagai berikut:
AC (akselerasi) = 0,167
DE (deelerasi) = 0,167
VE (kecepatan) = 0,75
Dengan menggunakan pengaturan ini, motor langkah berputar satu kali setiap 1,33 detik.
Panjang lengan
Kecepatan sudut berbeda, tergantung pada radius lengan. Misalnya, jika radius lingkaran sekitar 5 cm, kecepatannya adalah ~25 cm per detik. Untuk menstandarkan prosedur pengujian, panjang lengan harus memiliki radius 5 cm untuk mencapai kecepatan 25 cm per detik. Toleransi ±1 diizinkan: yaitu, dari 24 hingga 26 cm per detik.
Dalam kasus tablet yang lebih kecil dengan ukuran tampilan diagonal hingga 10'', radius yang direkomendasikan adalah 3 cm, bukan 5 cm.
Posisi lengan
Idealnya, Anda harus mencakup area layar sebanyak mungkin dengan menjalankan pengujian beberapa kali di berbagai bagian layar. Latensi di bagian mana pun dari digitizer diharapkan sama atau di bawah latensi target (15 md).
Menguji perangkat dengan keyboard: Jika Anda menggunakan perangkat tablet, Anda akan memerlukan keyboard eksternal untuk menyelesaikan prosedur pengujian.
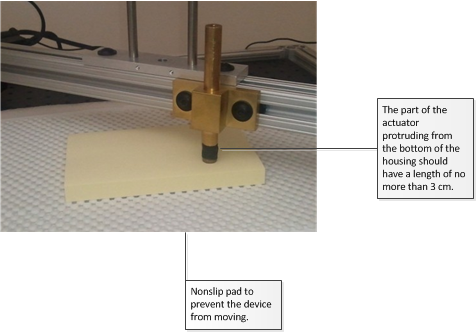
Tempatkan perangkat pengujian pada permukaan yang tidak tergelincir: Tempatkan perangkat pengujian sewaktu-waktu tidak bergerak selama pengujian. Untuk perangkat kecil, solusi sederhana adalah menempatkannya di atas pad non-slip seperti yang ditunjukkan pada gambar di bawah ini. Cara lain adalah dengan memiliki penjepit untuk menahan perangkat dengan kuat di tempatnya.
Tingkatkan perangkat pengujian: aktuator dirancang untuk meminimalkan efek perataan sehingga leveling tidak harus sempurna. Namun, Anda harus memastikan bahwa permukaan aktuator (~ berdiameter 9 mm) menyentuh perangkat secara seragam dan tidak berdiri di satu tepi.
Tutup proses yang tidak perlu dari perangkat pengujian: Karena Anda mengukur performa sistem, tutup proses yang tidak perlu dari perangkat pengujian.
Persyaratan perangkat lunak
Perangkat lunak yang diperlukan harus diinstal dan dikonfigurasi oleh pengontrol logo dan klien. Jika berjalan sebagai mandiri, salin stepmotor.exe, wlklogannotation.dll, dan WTTLog.dll ke folder lokal.
Prosedur pengujian untuk alat Triex RA
Prosedur pengujian terdiri dari tiga langkah: kalibrasi, akuisisi, dan pengumpulan. Namun, sebelum memulai pengujian, Anda harus meratakan perangkat. Titik perataan adalah untuk menyelaraskannya dengan tingkat motor yang berputar dalam lingkaran. Jika tidak diratakan dengan benar, aktuator tidak akan melakukan kontak yang baik dengan digitizer dan lingkaran yang digambar oleh motor langkah akan menjadi tidak teratur dan akan sangat mempengaruhi angka latensi di akhir. Metode verifikasi disertakan untuk gagal dalam pengujian jika perangkat tidak diratakan atau diselaraskan dengan benar.
Kalibrasi
Saat memulai stepmotor.exe, Anda akan melihat layar kosong. Tekan tombol spasi untuk memulai kalibrasi. Tujuan kalibrasi adalah untuk menemukan posisi sentuhan yang dilaporkan dalam perkiraan kesalahan yang dapat ditoleransi ketika pengganggu foto disinyalir. Karena hasil kalibrasi dapat sangat memengaruhi angka latensi, penting bagi Anda untuk mengkalibrasi dengan hati-hati.
Siapkan
Koneksi mikrokontroler ke komputer.
Aktifkan sakelar Daya kotak kontrol.
Ganti nama Provinsi Power
Di
Motor
Nonaktif
Mengkalibrasi
Nonaktif
Mode
Tach
Pastikan sakelar Motor dimatikan.
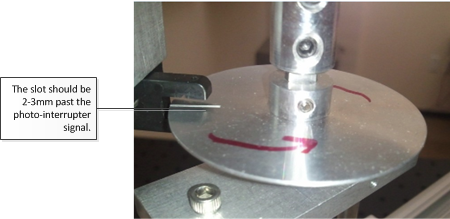
Pastikan bahwa pengganggu foto tidak memberi sinyal (lampu pengganggu foto mati). Slot disk harus diposisikan sekitar 2-3 mm melewati sinar sinyal pengganggu foto.
Ada dua alasan untuk posisi. Pertama, ketika Anda menyalakan motor, lengan motor akan sedikit jitter. Ketika itu terjadi, Anda tidak ingin melewati sinar dan oleh karena itu membuat sinyal pengganggu foto. Kedua, ketika Anda menjalankan skrip kalibrasi otomatis, ini adalah posisi di mana perulangan dimulai dan Anda ingin memastikan bahwa akhir perulangan (ketika kalibrasi dimulai) selaras dengan benar agar berada di bawah pengganggu foto. Jika Anda mengkalibrasi secara manual, ini masih merupakan posisi yang baik untuk memulai dengan demikian, Anda tidak perlu mengubah apa pun.
Jangan pindahkan atau turunkan lengan hingga Anda memasuki fase kalibrasi.
Jalankan stepmotor.exe. Jika Anda menjalankan program melalui Pengontrol HLK Windows, pilih mesin dan uji latensi panning untuk memulai pengujian.
Pesan teks berikut muncul:
Tekan bilah spasi untuk memulai proses kalibrasi.
Tekan bilah spasi. Kata CALIBRATION muncul di layar.
Turunkan aktuator ke permukaan layar.
Langkah-langkah pengujian (otomatis)
Nyalakan motornya. Motor stepper akan berjalan dalam mode kalibrasi sembilan kali.
Di akhir mode kalibrasi, mode ini akan berhenti selama lima detik. Ikuti instruksi di bagian Akuisisi topik ini.
Langkah-langkah pengujian (manual)
Perlahan-lahan putar lengan ke arah yang sama seperti di mana motor akan bergerak ketika dihidupkan.
Kurangi kecepatan hampir ke titik pemberhentian lengkap ketika jarum (atau lubang) melewati pengganggu foto. (Perhatikan bahwa kecepatan maksimum tidak boleh melebihi 1% dari kecepatan akuisisi/koleksi; yaitu, jika kecepatan akuisisi/koleksi adalah 25 cm/dtk, maka kecepatan kalibrasi ketika slot melewati interupter foto harus kurang dari 0,25 cm/dtk.)
Putar lengan dengan hati-hati untuk melewati pengganggu foto.
Ulangi langkah 1 hingga 2 setidaknya enam kali.
Ketika sinyal terganggu, Anda akan melihat pengganggu foto berkedip dan jendela pengujian akan melaporkan lokasi layar yang tepat di mana aktuator melakukan kontak. Berikut ini adalah hasil sampel:
Touch Pointer Update count=0, x=508,y=110 Touch Pointer Update count=1, x=512,y=113
Hasil yang diharapkan
Jika kalibrasi berhasil dilakukan, Anda tidak akan melihat pesan kesalahan apa pun.
Akuisisi
Selama langkah akuisisi, kecepatan motor langkah dan bentuk lingkaran dihitung.
Siapkan
Pastikan slot ditempatkan sejauh mungkin dari pengganggu foto.
Langkah-langkah pengujian
Tekan bilah spasi dan nyalakan sakelar Motor secara bersamaan. Teks di layar harus berubah menjadi AKUISISI.
Biarkan perangkat berjalan selama sekitar sepuluh loop.
Tekan bilah spasi lagi untuk masuk ke mode KOLEKSI.
Hasil yang diharapkan
Layar akan menampilkan bahwa mode COLLECTION aktif dan menampilkan data akuisisi. Ini menunjukkan daftar waktu dan kecepatan yang dihitung untuk setiap perulangan. Beberapa perulangan pertama mungkin dilewati jika motor langkah berantakan dan menunjukkan hasil yang buruk. Contoh teks adalah sebagai berikut:
[4]: t: 1.333 [s] v: 25.456 [cm/s]
Hal ini menunjukkan pada Anda:
[loop number]: t:<loop time in seconds> [s] v:<velocity> [cm/s]
Koleksi
Pengumpulan data mewakili langkah terakhir untuk pengujian.
Siapkan
Pastikan kata COLLECTION muncul di bagian atas layar. Jika kata CALIBRATION tetap ada setelah Anda menekan bilah spasi, terjadi kesalahan. Anda harus menjalankan pengujian lagi.
Langkah-langkah pengujian
Biarkan motor berjalan sekitar sepuluh loop.
Tekan bilah spasi untuk menyelesaikan pengujian.
Matikan sakelar Motor.
Hasil yang diharapkan
Anda akan melihat hasil lulus atau gagal.

Prosedur pengujian untuk alat ITRI RA
Prosedur untuk menjalankan alat Latensi Touch Panning pada alat ITRI RA sedikit berbeda dari menjalankan pengujian dengan alat Triex RA. Pengujian itu sendiri tetap sama dan berisi serangkaian langkah Kalibrasi, Akuisisi, dan Koleksi yang sama. Langkah-langkah untuk menjalankan pengujian dengan ITRI adalah sebagai berikut:
Sasis RA

Perhatikan bahwa dalam kasus alat ITRI RA, sakelar kalibrasi memiliki tiga posisi: on, off, dan home, yang merupakan posisi tengah.
Untuk memulai, sakelar harus sebagai berikut:
Ganti nama Provinsi Power
Di
Motor
Nonaktif
Mengkalibrasi
Nonaktif (turun)
Mode
Pengalih
Nol sistem dengan mengubah sakelar ke yang berikut dan membiarkan motor memutar lengan 45 derajat. Setelah selesai, matikan motor ke NONAKTIF.
Ganti nama Provinsi Power
Di
Motor
Nonaktif
Mengkalibrasi
Rumah (tengah)
Mode
Panning (atas)
Letakkan jari uji ke bawah pada perangkat dan tekan bilah spasi untuk memasuki fase Kalibrasi. Sakelar sekarang sebagai berikut:
Ganti nama Provinsi Power
Di
Motor
Di
Mengkalibrasi
Aktif (atas)
Mode
Panning (atas)
Izinkan pengujian berjalan melewati hitungan 17, lalu matikan Motor dan matikan sakelar Kalibrasi ke nonaktif (posisi terendah):
Ganti nama Provinsi Power
Di
Motor
Nonaktif
Mengkalibrasi
Nonaktif (lebih rendah)
Mode
Panning (atas)
Tekan bilah spasi, dan nyalakan kembali motor untuk fase Akuisisi.
Setelah layar memperlihatkan nilai hitungan lebih dari 1999, tekan bilah spasi. Tampilan pengujian akan menunjukkan waktu lingkaran motor dan kecepatan. Tunggu hingga informasi kontak dikumpulkan dalam fase Koleksi selama sekitar sepuluh perulangan, lalu tekan bilah spasi. Pada titik ini, sistem selesai. Tekan bilah spasi lagi dan matikan motor.
Analisis dan laporan
Analisis
Jika ada kegagalan dalam kalibrasi atau akuisisi, pengujian akan gagal dan Anda dapat melihat detail kegagalan dalam laporan. Anda akan melihat kesalahan seperti berikut ini:
Warning multiple touch devices present.
Calibration failed: x11err=3.71 y11err=1.14 x22err=9.14 y22err=1.71
Acquisition failed: Circles are showing variations in pixel= 9.70
[135] 581 451 739 602 [199556137598] > 18 48
Laporan
Pass atau fail dilaporkan melalui Windows HLK. Jika Anda menjalankan pengujian secara manual, Anda dapat membuka file TabletDigitizerOPK.wtl di WTT atau di Notepad. Latensi panning rata-rata dicatat hingga akhir. Latensi target sama atau kurang dari 15 milidetik.
Mode kalibrasi otomatis
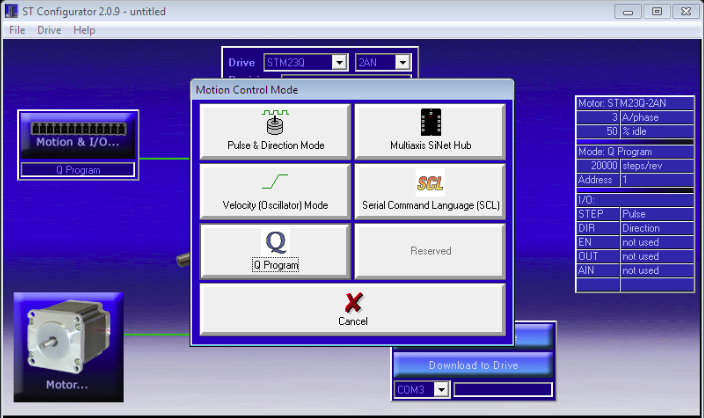
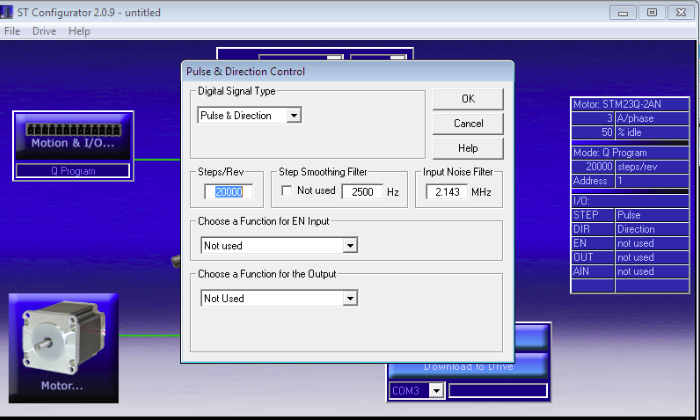
Mode kalibrasi otomatis adalah mode default untuk alat RA. Saat Anda menjalankan skrip, pertama-tama pastikan bahwa motor langkah diatur ke 20000 langkah per revolusi dalam pengaturan pemrogram Q. Konfigurasi ini dapat diatur menggunakan alat ST Configurator. Buka Gerakan & I/O lalu Pulse & Direction Control.
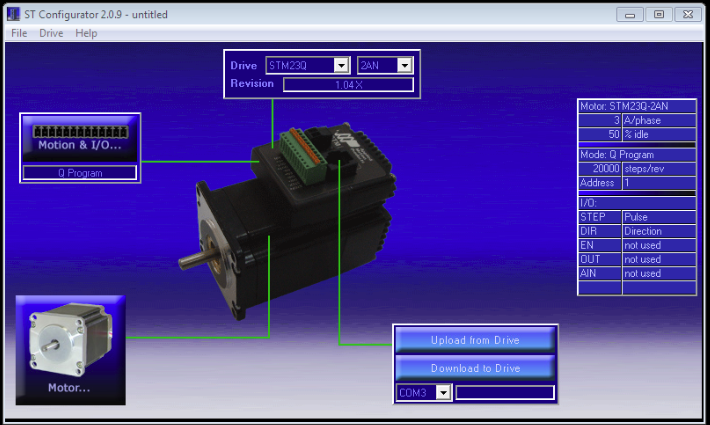
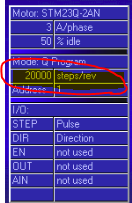
Pastikan bahwa pengaturan Langkah/Rev menunjukkan 20000.
Pengaturan di sisi kanan juga harus menampilkan Langkah/Rev yang saat ini diatur untuk motor langkah.
Jika pengaturan sudah benar, maka skrip otomatisasi akan berjalan dalam tiga mode secara berurutan:
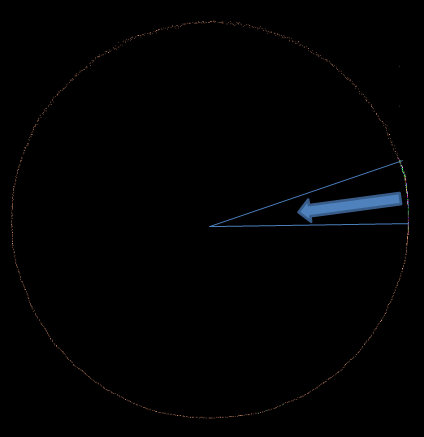
Mode kalibrasi: Ketika Anda pertama kali menyalakan motor, ini adalah mode pertama yang akan dijalankannya. Selama mode kalibrasi, motor langkah berjalan pada kecepatan 0,75 revolusi per detik (sekitar 1,33 detik per loop) selama 339 derajat dari posisi awal. Kemudian berhenti selama 0,5 detik sebelum berjalan pada kecepatan revolusi 0,0042 per detik (kecepatan serendah mungkin untuk motor stepper) selama 21 derajat. Saat motor stepper berjalan pada kecepatan yang sangat rendah, program pengujian (stepmotor.exe) menghubungkan posisi dan tanda waktu dari kontak sentuh yang dilaporkan ketika sinar pengganggu foto terganggu.
Contoh berikut adalah cuplikan layar tentang tampilan lingkaran. Bagian busur di mana panah menunjuk adalah tempat motor stepper berjalan dalam kecepatan lambat dan di mana interupter foto harus memberi sinyal. Penting bahwa operator menyelaraskan posisi awal disk dengan benar: yaitu, slot pada disk harus sekitar 2-3 mm melewati pengganggu foto.
Sebagai referensi, berikut ini menjelaskan bagaimana busur kalibrasi ini dirancang:
Parameter VE di Q-Programmer 0.0042 Rata-rata panjang busur sinyal kalibrasi
1,85 cm (berdasarkan lingkar 31,26 cm)
Sudut sinyal kalibrasi rata-rata
0,37 radian (21,20 derajat
Waktu sinyal kalibrasi rata-rata
12,50 detik (termasuk waktu tunggu 0,5 detik saat mengubah kecepatan)
Kecepatan sinyal kalibrasi rata-rata
Lima detik menunggu: Setelah sembilan loop kalibrasi, motor akan berhenti selama lima detik. Selama waktu ini, operator harus menekan bilah spasi untuk masuk ke mode Akuisisi.
Mode Akuisisi/Koleksi: Setelah lima detik menunggu, motor akan berjalan dengan kecepatan 0,75 revolusi per detik (1,33 detik per per perulangan) tanpa batas waktu.
Pemecahan masalah
Kalibrasi
Selama kalibrasi, program pengujian tidak dapat menghitung lokasi yang tepat dari peristiwa sentuh ketika pengganggu foto disinyalir. Oleh karena itu penting bahwa Anda tidak memperkenalkan latensi dengan memutar lengan terlalu cepat. Jika ada kesalahan, Anda akan melihat pesan kesalahan di layar. Misalnya:
Calibration failed: x11err=3.71 y11err=1.14 x22err=9.14 y22err=1.71.
Hentikan dan selidiki penyebabnya sebelum Anda memulai ulang pengujian. Ada beberapa alasan umum untuk kegagalan. Mereka terjadi karena program pengujian tidak dapat membuat perhitungan yang baik dari titik sentuh. Alasan untuk ini meliputi:
Anda menggerakkan jari (aktuator) terlalu cepat ketika gangguan foto memberi sinyal.
Perangkat telah dipindahkan.
Atasi masalah ini dan coba lagi hingga Anda mendapatkan kalibrasi yang baik. Hal-hal tambahan yang perlu diingat adalah:
Jangan pernah membalik lengan dengan cara lain.
Gerakkan lengan dengan sangat hati-hati saat melewati pengganggu foto, untuk meminimalkan kesalahan dan latensi yang mungkin Anda perkenalkan.
Harus selalu ada dua sinyal ketika pengganggu foto terganggu. Sinyal pertama terjadi ketika cahaya melewati slot di ujung tepi. Sinyal kedua terjadi ketika cahaya diblokir setelah melewati slot terbuka. Jumlah indeks berbasis nol. Setelah dua peristiwa terjadi, jumlahnya harus berupa angka ganjil. Jika Anda melihat pesan berikut ketika Anda baru saja memulai kalibrasi dan bahkan tidak memutar lengan, Anda mungkin telah membalik lengan (oleh karena itu disk) di sekitar pengganggu foto setidaknya satu kali, menyebabkannya sinyal. Ini akan secara otomatis menyebabkan kalibrasi gagal. Segera hentikan pengujian dan mulai ulang.
Touch Pointer Update count=0, x=0, y=0
Akuisisi
Jika akuisisi gagal, Anda akan melihat pesan kesalahan yang mirip dengan salah satu hal berikut:
ERROR: Acquisition failed: Loop times not consistent > 6.3
ERROR: Acquisition failed: Circles are showing too many variations in pixels Rcm_error=0.5 xPixelErr=20 yPixelErr=20
Jenis kesalahan pertama dihasilkan ketika perbedaan rata-rata di antara waktu perulangan lebih dari lima milidetik. Jenis kesalahan kedua terjadi ketika lingkaran tidak digambar sebagai lingkaran sempurna dan karenanya mengakibatkan variasi piksel yang lebih besar dari lima piksel. Penyebab umum untuk perilaku ini meliputi yang berikut ini:
Perangkat yang tidak diratakan atau salah dikalibrasi.
Perangkat telah dipindahkan.
Kecepatan motor langkah tidak konsisten. (Ini bukan penjelasan yang mungkin karena ini adalah perangkat yang mapan dan banyak digunakan; namun ada kemungkinan bahwa motor rusak pada perangkat tertentu Anda.)
Koleksi
Seharusnya ada beberapa masalah selama pengumpulan jika langkah-langkah kalibrasi dan akuisisi diteruskan. Sebagian besar kesalahan disebabkan oleh faktor eksternal seperti, perangkat yang dipindahkan, beberapa proses lain yang mengganggu program pengujian, atau perangkat itu sendiri gagal. Operator mungkin mengalami tiga masalah umum berikut:
Masalah 1: Gangguan medan elektromagnetik
Kesalahan dapat disebabkan oleh efek gaya elektromagnetik yang dihasilkan oleh motor stepper. Tergantung pada perangkat, ini dapat dimanifestasikan dengan berbagai cara: misalnya, titik sentuhan hantu yang dihasilkan. Solusi untuk masalah ini adalah memberikan tanah yang baik.
Masalah 2: Proses lain mengganggu program pengujian
Ketika proses lain mengganggu proses pengujian, biasanya akan merusak hasil pengujian dengan berdampak negatif pada angka latensi.
Anda dapat mendiagnosis masalah ini dengan membandingkan interval sinyal gangguan foto. Tinjau file csignal.txt, yang berisi stempel waktu dari photo-interrupter. Kolom kedua menunjukkan stempel waktu sistem dan kolom ketiga memperlihatkan stempel waktu mikrokontroler. Misalnya:
[ 0: 0] 431506434557 538485264317
[ 1: 10] 431506447610 538485343495
[ 2: 1333] 431508166028 538495929302
[ 3: 1343] 431508178968 538496008565
[ 4: 1797] 431508769804 538499651185
[ 5: 1803] 431508776386 538499652266
[ 6: 2665] 431509897168 538506594116
[ 7: 2675] 431509910127 538506673294
[ 8: 3998] 431511628522 538517258922
[ 9: 4008] 431511641481 538517338232
[10: 5331] 431513359910 538527923775
[11: 5342] 431513372973 538528003038
sfirst = 0
Entri terakhir dalam file menunjukkan indeks urutan sinyal pertama yang valid. 'Urutan sinyal yang valid' mengacu pada awal urutan sinyal ketika sistem menjadi stabil. Antara akuisisi dan pengumpulan, program pengujian menulis hasil akuisisi ke file log dan, tergantung pada performa sistem, mungkin perlu waktu agar menjadi stabil. Dalam contoh di atas, sinyal pertama valid sehingga Anda dapat mulai membandingkan interval stempel waktu.
Anda dapat mengambil interval stempel waktu dengan mencatat perbedaan antara dua stempel waktu bernomor genap; atau contoh, 0, 2, 4, 6, dll. Seperti yang ditunjukkan dalam tabel berikut, sinyal 4 dan 6 cukup berbeda dari interval sinyal lainnya. Oleh karena itu, kita tahu bahwa proses lain telah mengganggu pengujian selama waktu itu. Dalam kasus normal, Anda akan melihat kurang dari 1% perbedaan.
| Indeks | Stempel waktu | Interval |
|---|---|---|
0 |
431506434557 |
|
2 |
431492585219 |
1731471 |
4 |
431494316516 |
603776 |
6 |
431496047748 |
1127364 |
8 |
431497779297 |
1731354 |
10 |
431499509508 |
1731388 |
12 |
431501240620 |
1731288 |
Masalah 3: Perubahan laju pengambilan sampel
Jika perangkat mengubah laju pengambilan sampelnya, varians yang signifikan dalam hasil latensi akan terjadi. Anda dapat mendiagnosis masalah ini dengan membandingkan tingkat pengambilan sampel akuisisi dan pengumpulan.
Anda dapat menggunakan alat eksternal untuk mengukur laju pengambilan sampel perangkat sebelum dan sesudah motor dihidupkan. Metode lain adalah menganalisis log yang dihasilkan oleh stepmotor.exe.
Buka Acquisition.txt.
Ambil tanda waktu baris pertama dan terakhir (kolom terakhir):
581 660 709 602 199501901480 581 805 512 602 199554132317Hitung tingkat pengambilan sampel akuisisi sebagai berikut:
(Last timestamp - first timestamp) /number of samples (rows)Buka Collection.txt.
Ambil tanda waktu baris pertama dan terakhir (kolom terakhir):
581 822 423 602 [199554407006] 581 288 164 602 [199594255626]Hitung laju pengambilan sampel koleksi sebagai berikut:
(Last timestamp - first timestamp) /number of samples (rows)
Jika Anda melihat lebih dari 2% perbedaan antara keduanya, data pengumpulan tidak dapat diandalkan dan Anda harus menyelidiki penyebabnya.
Dukungan tambahan
Jika dukungan tambahan diperlukan, hubungi salah satu vendor jig bersertifikat berikut:
Triex Technologies, Inc.
+1 (206) 940-0943
Institut Penelitian Teknologi Industri
+886 (03) 5743887