Catatan
Akses ke halaman ini memerlukan otorisasi. Anda dapat mencoba masuk atau mengubah direktori.
Akses ke halaman ini memerlukan otorisasi. Anda dapat mencoba mengubah direktori.
Pengenalan
Dokumen ini adalah panduan atau suplemen untuk dokumentasi dan alat HLK 2.0 yang ada untuk sensor OEM, ODM, dan IHV. Ini memberikan beberapa tips dan trik yang dapat dimanfaatkan mitra untuk menjalankan pengujian. Mitra bebas menggunakan implementasi lain untuk menguji perangkat mereka - ini hanya referensi tunggal. Item yang diidentifikasi dalam dokumen ini bersifat opsional (Anda dapat menjalankan pengujian tanpa perangkat keras ini). Mereka hanya digunakan untuk membantu menunjukkan orientasi untuk tujuan dokumen ini.
Dokumen ini mengasumsikan bahwa HLK 2.0 atau yang lebih besar sedang digunakan untuk menguji sistem faktor bentuk tablet (membutuhkan sensor gerakan dan cahaya). Faktor bentuk lainnya (misalnya laptop) berada di luar lingkup dokumen ini. Meskipun pengujian memvalidasi sistem faktor bentuk lainnya, detail di bawah ini terutama dirancang untuk mengoptimalkan pengujian pada sistem faktor bentuk tablet.
Dokumen ini menjelaskan tes berikut:
Pengujian sensor gerakan diperlukan untuk hal-hal berikut:
Sertifikasi perangkat sensor
Sertifikasi sistem
Motivasi untuk memiliki tes yang identik di kedua area ini adalah untuk memastikan bahwa IHV menyediakan perangkat keras, firmware, dan driver yang lewat ke produsen PC dan bahwa produsen PC mengintegrasikan bagian-bagian dengan benar ke sistem mereka untuk memberikan pembacaan sensor yang akurat dan andal.
Tujuan Pengujian
Tujuan utama pengujian sensor gerakan adalah untuk membantu mitra perangkat keras dalam memvalidasi bahwa sensor mereka berorientasi dengan benar dalam sistem dan bahwa mereka memenuhi persyaratan akurasi yang diperlukan WHLK. Tes ini tidak dirancang untuk memberikan cakupan pengujian penuh atau untuk memanfaatkan peralatan khusus yang dapat lebih akurat menentukan ketidakakuratan sensor individu. Disarankan agar produsen PC untuk menguji sistem mereka dengan aplikasi tambahan dan tes jaminan kualitas setelah lulus WHLK (misalnya pengujian dengan aplikasi Windows 8 berkualitas produksi).
Urutan Pengujian yang Direkomendasikan
Microsoft menyarankan agar Anda menjalankan pengujian dalam urutan yang tercantum dalam tabel berikut. Dengan menguji akselerometer dan giroskop terlebih dahulu, Anda dapat memastikan bahwa sensor dasar ini berfungsi dengan benar. Serangkaian pengujian berikutnya memvalidasi data dari sensor Compass, Inclinometer, dan Orientation yang diturunkan dengan menggabungkan data dari beberapa sensor. Disarankan juga untuk tidak mencoba menjalankan tes berikutnya sampai semua tes sebelumnya lolos.
| Sensor | Nama Pengujian | Dependensi |
|---|---|---|
Accelerometer |
Verifikasi Orientasi Sensor - Akselerometer 3D |
n/a |
Giroskop |
Uji Sensor Giroskop |
n/a |
Kompas |
Verifikasi Orientasi Sensor - Kompas 3D |
Akselerometer, Giro, Kompas |
Inclinometer |
Verifikasi Orientasi Sensor - Inklinometer |
Akselerometer, Giro, Kompas |
Sensor Fusion/Orientasi (Matriks Rotasi / Quaternion) |
Verifikasi Sensor Orientasi Tingkat Lanjut |
Akselerometer, Giro, Kompas |
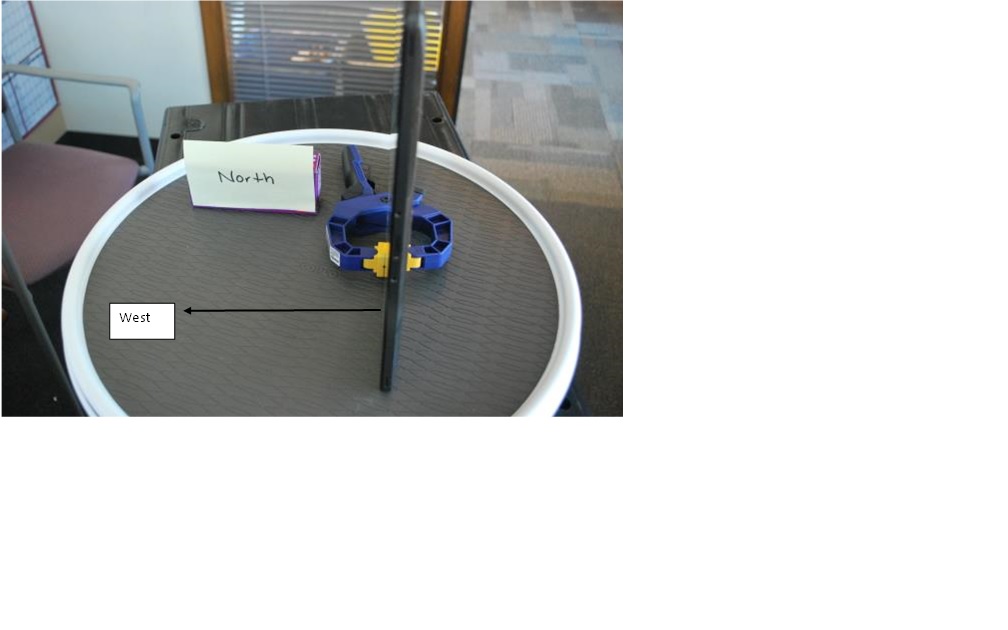
Peralatan Uji yang Disarankan
Untuk keperluan dokumen ini, item perangkat keras berikut digunakan untuk membantu menjalankan tes WHLK. Meskipun perangkat ini tidak diperlukan untuk WHLK, perangkat tersebut dapat membantu teknisi validasi melalui pengujian dengan lebih mudah jika digunakan.

Gambar 1 Peralatan Uji yang Disarankan
Keyboard Bluetooth
Mouse Bluetooth
Compass / GPS
Jepit dan pita untuk menahan sistem
Menyelesaikan turn-table (misalnya, Lazy Susan)
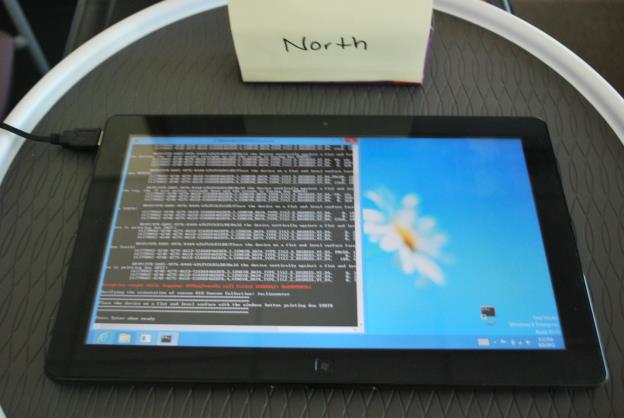
Alat Diagnostik Sensor
Perangkat tambahan ini membantu menguji sistem faktor bentuk tablet (di mana akselerometer, giro, kompas, inklinometer dan sensor orientasi diperlukan). Untuk konfigurasi lain, alat-alat ini mungkin tidak berlaku. Sisa dokumen ini hanya akan berfokus pada tablet dan bukan faktor bentuk lainnya.
Alat diagnostik sensor (sensordiagnostictool.exe tersedia di WDK) berguna untuk kegagalan pengujian penelusuran kesalahan. Alat ini akan menunjukkan data yang dikembalikan secara real-time dari berbagai sensor gerakan yang dapat dibandingkan dengan hasil yang diharapkan.
Verifikasi Orientasi Sensor - Akselerometer 3D
Cakupan Pengujian: Pengujian ini memverifikasi akselerometer berorientasi dengan benar dalam sistem. Pengujian memiliki toleransi kesalahan +/- 0,1 G.
Prasyarat sebelum menjalankan pengujian ini:
Verifikasi secara manual bahwa autorotasi layar berfungsi seperti yang diharapkan.
Gunakan SDT dan validasi bahwa sensor tidak menampilkan peristiwa data baru saat duduk diam.
Setelah prasyarat sederhana ini lulus, lanjutkan untuk menjalankan tes WHLK. Jika Anda mengalami kesalahan dengan pengujian, pastikan perangkat berada dalam orientasi yang benar sesuai dokumen ini. Produsen PC dengan pertanyaan harus terlebih dahulu menghubungi produsen sensor (IHV) mereka untuk mengidentifikasi bagaimana mereka lulus tes WHLK sebelum menghubungi Microsoft untuk bantuan dengan tes WHLK.
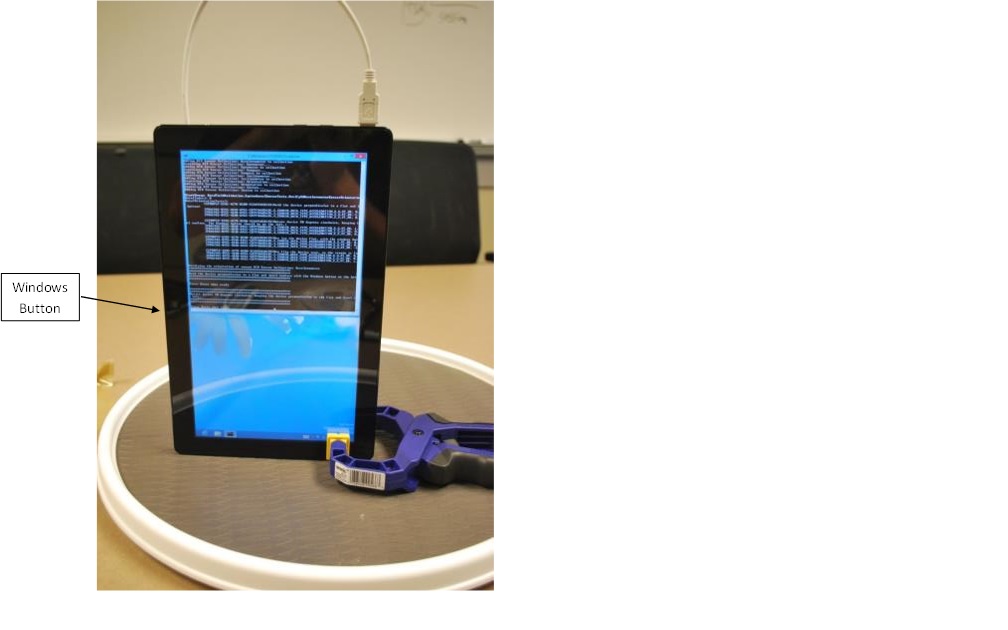
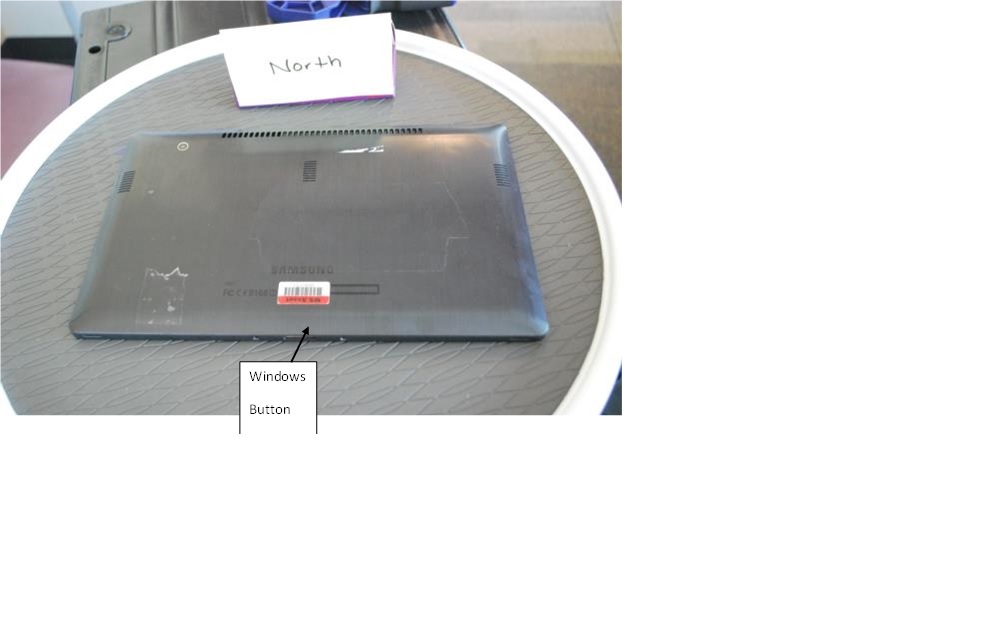
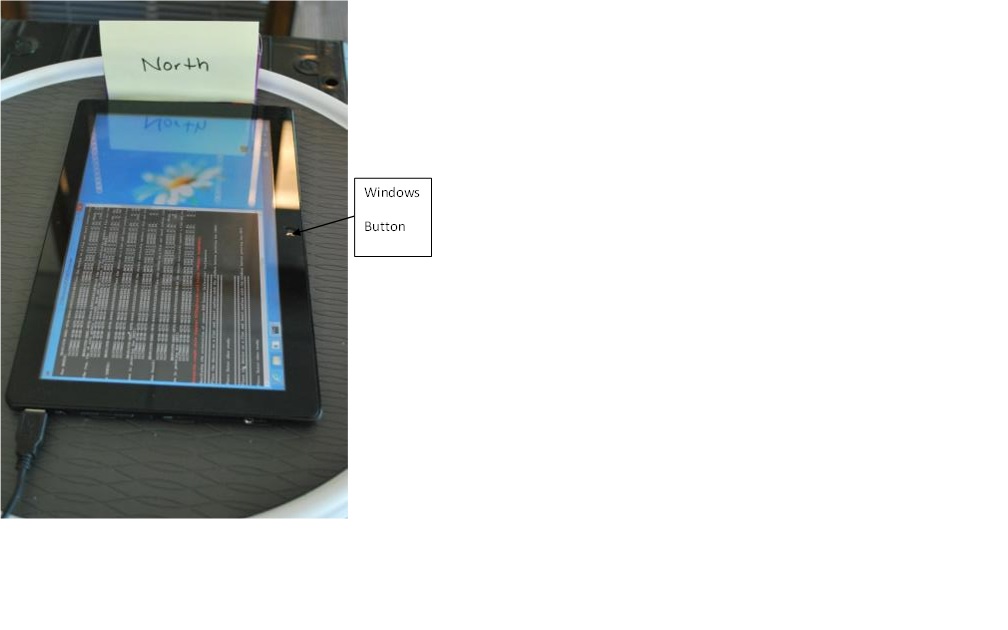
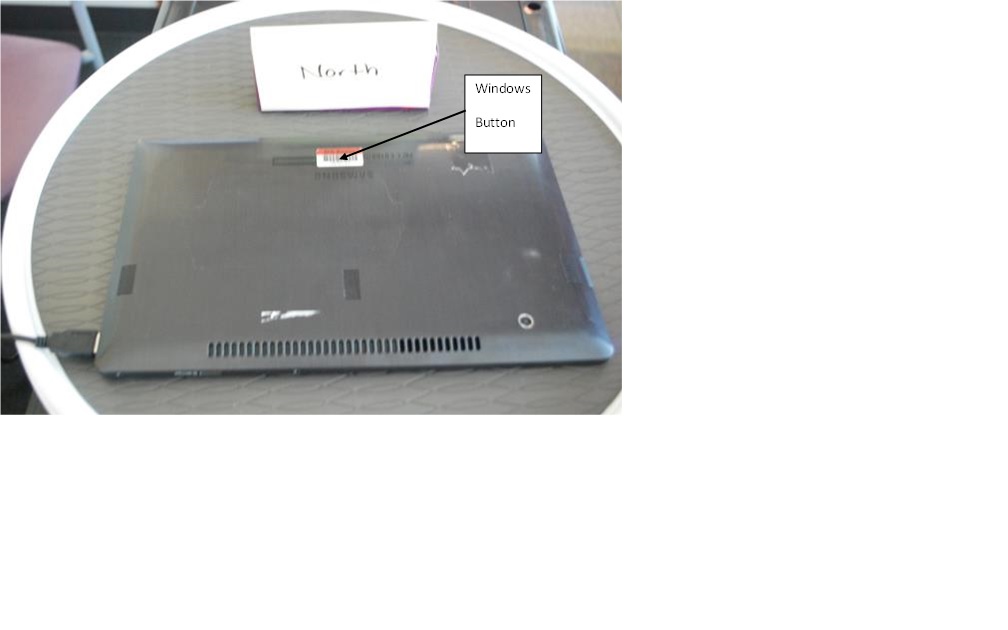
Uji Akselerometer 1
Tahan perangkat setinggi tinggi ke permukaan datar dan tingkat dengan tombol Windows di bagian bawah.
Nilai yang diharapkan:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
-1 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
0 |

Gambar 2 Tes Akselerometer 1
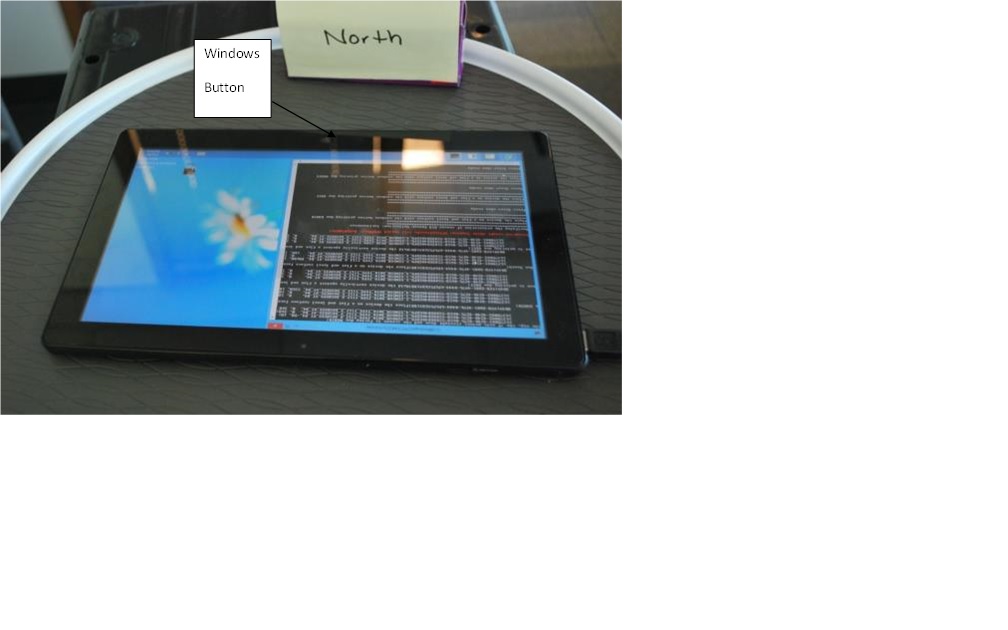
Uji Akselerometer 2
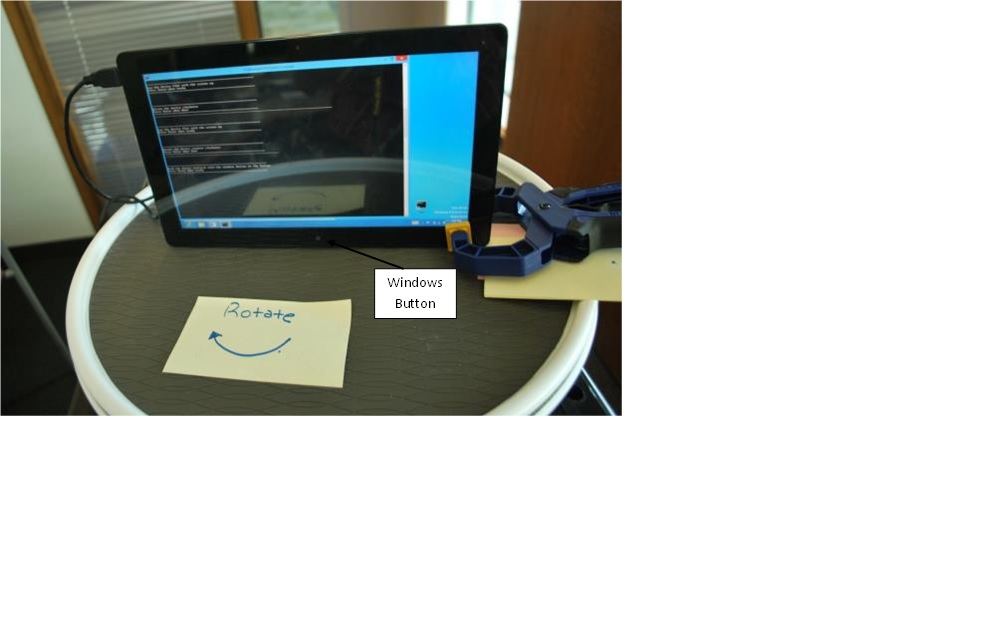
Putar perangkat 90 derajat searah jajar, menjaga perangkat tetap setinggi tinggi ke permukaan datar dan tingkat. Tombol Windows harus berada di sebelah kiri.
Nilai yang diharapkan:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
1 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
0 |
Gambar 3 Tes Akselerometer 2
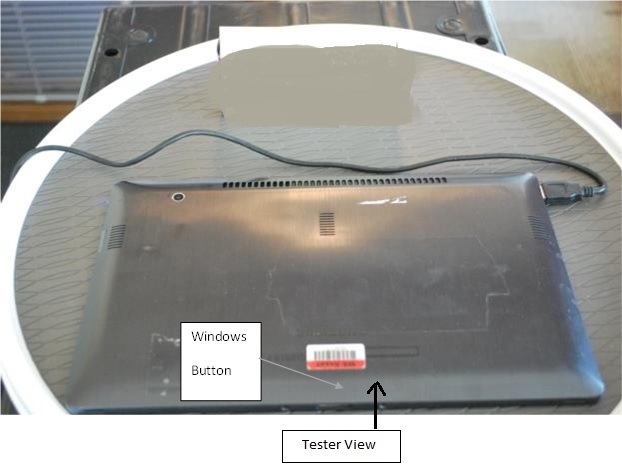
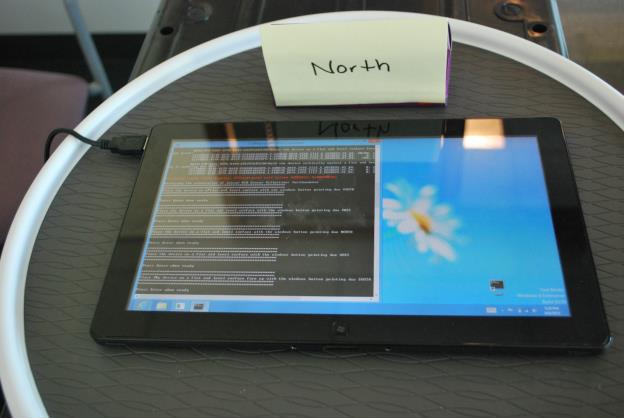
Uji Akselerometer 3
Sekarang letakkan perangkat datar, dengan tombol jendela menjauh dari Anda.
Nilai yang diharapkan:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
-1 |

Gambar 4 Uji Akselerometer 3
Uji Akselerometer 4
Sekarang balikkan perangkat, sehingga layar menghadap ke bawah.
Nilai yang diharapkan:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
1 |
Gambar 5 Tes Akselerometer 4
Uji Sensor Giroskop
Cakupan Pengujian:
Giroskop umumnya memancarkan kebisingan pada besaran +/- 2 derajat per detik. Sebelum menjalankan pengujian verifikasi Giroskop, penguji harus menggunakan alat diagnostik sensor untuk memvalidasi sensor giroskop tidak menghasilkan nilai yang lebih besar dari 2 derajat per detik ketika sistem stasioner.
Prasyarat sebelum menjalankan pengujian ini:
Tes akselerometer lulus.
Gunakan SDT, dan validasi bahwa sensor tidak mengembalikan data saat duduk stasioner di permukaan datar.
Jika sensor giroskop menghasilkan kebisingan yang berlebihan, penguji harus bekerja dengan produsen sensor untuk memahami dan memperbaiki sumber kebisingan.
Tes giro mengharapkan untuk menerima kecepatan sudut yang lebih besar dari 40 derajat per detik pada sumbu yang diputar dan kurang dari 15 derajat per detik pada sumbu stasioner. Untuk mencapai hasil yang lolos, penguji kemungkinan akan menemukan bahwa sistem dapat diputar pada turntable untuk menjaga dua sumbu lainnya tetap stasioner. Perhatikan bahwa sistem juga harus berpusat pada turntable untuk mencegah pergerakan pada sumbu lain mendeteksi rotasi.
Tes Gyro 1
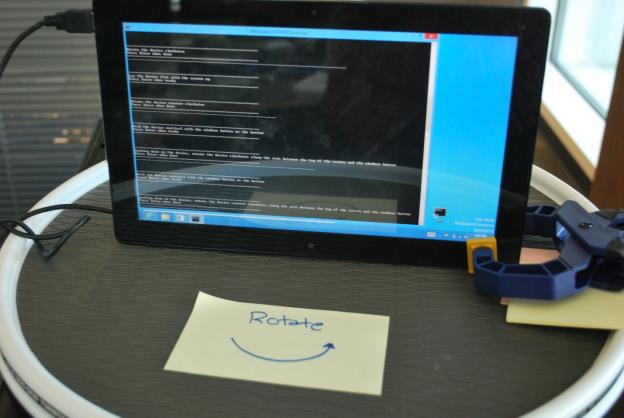
Letakkan perangkat datar dengan layar di atas. Putar perangkat searah jajar.
Nilai yang diharapkan selama rotasi:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< -40 |
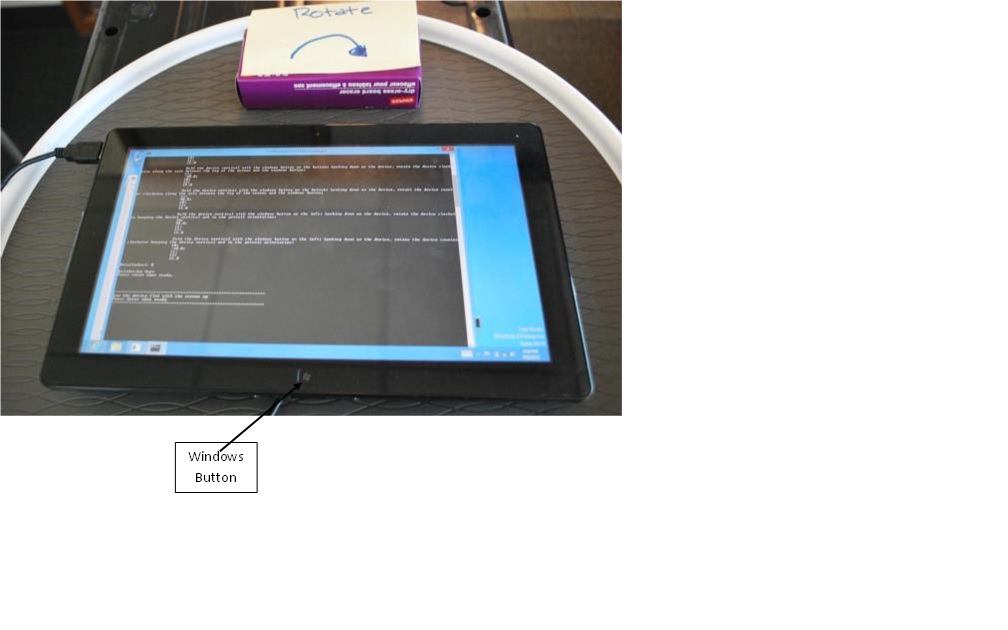
Gambar 6 Gyro Test 1
Tes Gyro 2
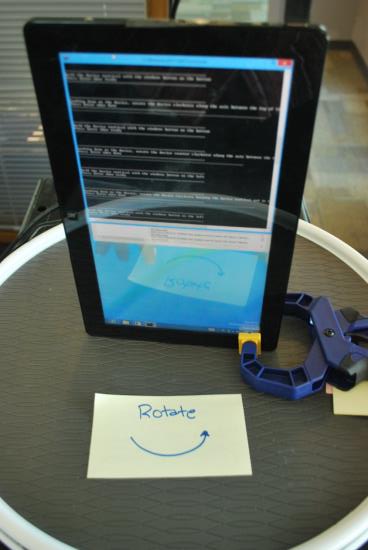
Letakkan perangkat datar dengan layar di atas. Putar perangkat berlawanan arah jaga.
Nilai yang Diharapkan selama rotasi:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
> 40 |
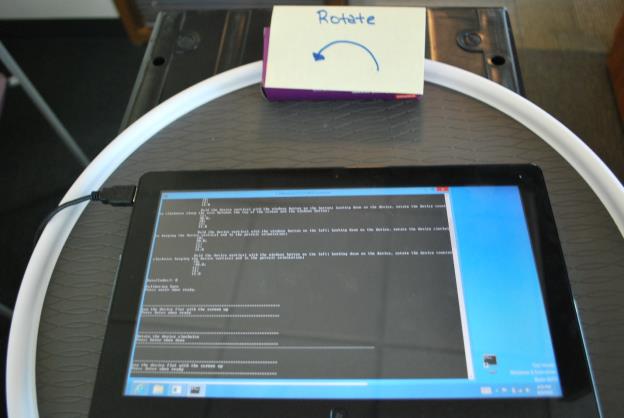
Gambar 7 Gyro Test 2
Gyro Test 3
Tahan vertikal perangkat dengan tombol jendela di bagian bawah. Melihat ke bawah pada perangkat, putar perangkat searah jaring jam di sepanjang sumbu antara bagian atas layar dan tombol jendela.
Nilai yang diharapkan selama rotasi:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< -40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |
Gambar 8 Gyro Test 3
Tes Gyro 4
Tahan vertikal perangkat dengan tombol jendela di bagian bawah. Melihat ke bawah pada perangkat, putar perangkat berlawanan arah jaring jam di sepanjang sumbu antara bagian atas layar dan tombol jendela.
Nilai yang diharapkan selama rotasi:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
> 40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |
Gambar 9 Gyro Test 4
Gyro Test 5
Tahan vertikal perangkat dengan tombol jendela di sebelah kiri. Melihat ke bawah pada perangkat, putar perangkat searah jaring jam menjaga perangkat tetap vertikal dan dalam orientasi potret.
Nilai yang diharapkan selama rotasi:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
> 40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |

Gambar 10 Gyro Test 5
Tes Gyro 6
Tahan vertikal perangkat dengan tombol jendela di sebelah kiri. Melihat ke bawah pada perangkat, putar perangkat berlawanan arah jaga perangkat tetap vertikal dan dalam orientasi potret.
Nilai yang diharapkan selama rotasi:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
<-40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |
Gambar 11 Gyro Test 6
Verifikasi Orientasi Sensor - Kompas 3D
Sebagian besar implementasi kompas menggunakan data dari magnetometer 3D dan giro untuk menghitung arah saat ini yang dihadapi pengguna relatif terhadap kutub utara magnetik. Beberapa implementasi juga menggunakan data dari akselerometer. Oleh karena itu, jika sensor giroskop atau akselerometer tidak berfungsi dengan baik, penguji harus berharap untuk melihat judul yang salah pengembalian kompas.
Karena kekuatan magnet bumi relatif lemah, sensor magnetometer akan sering mengalami gangguan dari komponen lain di dalam sistem. Jika magnetometer tidak cukup terisolasi dari sumber gangguan elektromagnetik seperti antena, saluran listrik, atau komponen lain yang terdiri dari bahan seperti besi yang mengganggu penerimaan magnetik, penguji akan menemukan bahwa kompas akan mengembalikan judul yang salah. Silakan merujuk ke whitepaper Sensor Gerakan dan Orientasi Integrasi untuk panduan tentang penempatan magnetometer yang benar dan praktik terbaik.
Pengguna sangat didorong untuk berdiri memegang sistem di berbagai sudut dan memutar sendiri sehingga mereka akhirnya menghadap ke arah yang berbeda. Terlepas dari sudut yang dipegang sistem, atau orientasi lanskap / potret, kompas harus selalu mengembalikan judul yang relatif terhadap arah yang dihadapi pengguna. Perhatikan bahwa alat diagnostik sensor dapat digunakan untuk menampilkan nilai judul dari sensor kompas. Jika penguji mengetahui bahwa kompas mengembalikan hasil yang salah atau tidak konsisten, silakan bekerja dengan vendor sensor magnetometer untuk menentukan apakah kesalahan tersebut disebabkan oleh gangguan atau algoritma fusi sensor yang berpotensi salah.
Pengujian kompas di WHLK memvalidasi bahwa kompas mengembalikan nilai yang diharapkan ketika sistem ditahan pada arah dan orientasi yang berbeda. Pengujian kompas memungkinkan toleransi kesalahan +/- 10 derajat. Penguji harus menggunakan kompas referensi untuk menentukan arah magnetik utara sebelum memulai uji kompas.
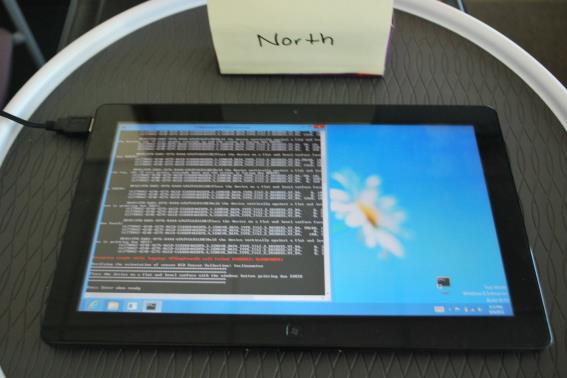
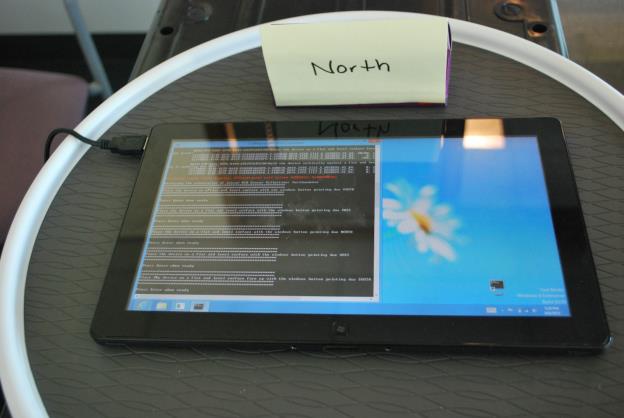
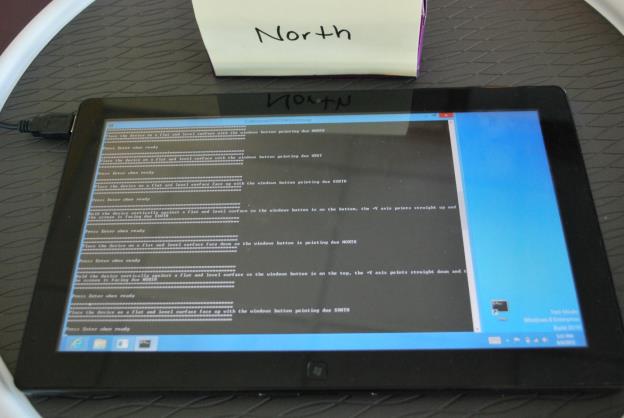
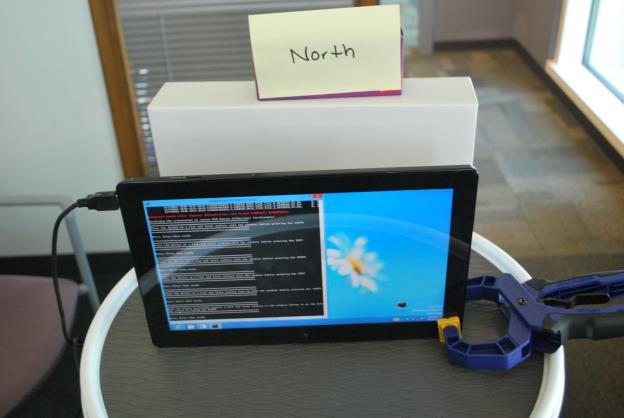
Uji Kompas 1
Letakkan perangkat di permukaan datar dengan tombol Windows menunjuk ke selatan.
Kompas harus mengembalikan judul mendekati 0 derajat.
Catatan
Abaikan teks pengecualian pengelogan. Ini tidak akan menyebabkan kegagalan dicatat.
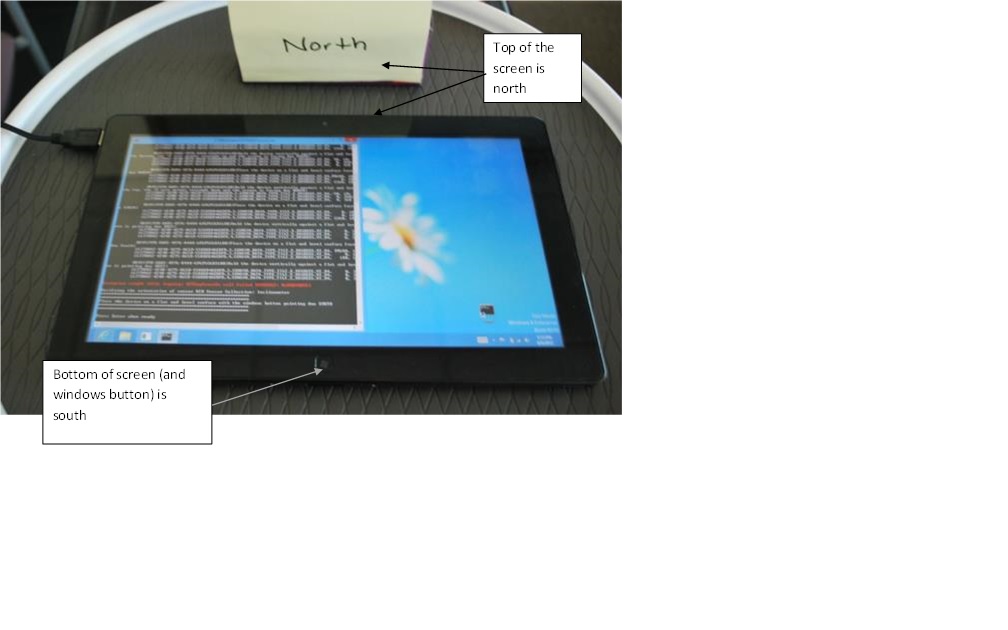
Gambar 12 Uji Kompas 1
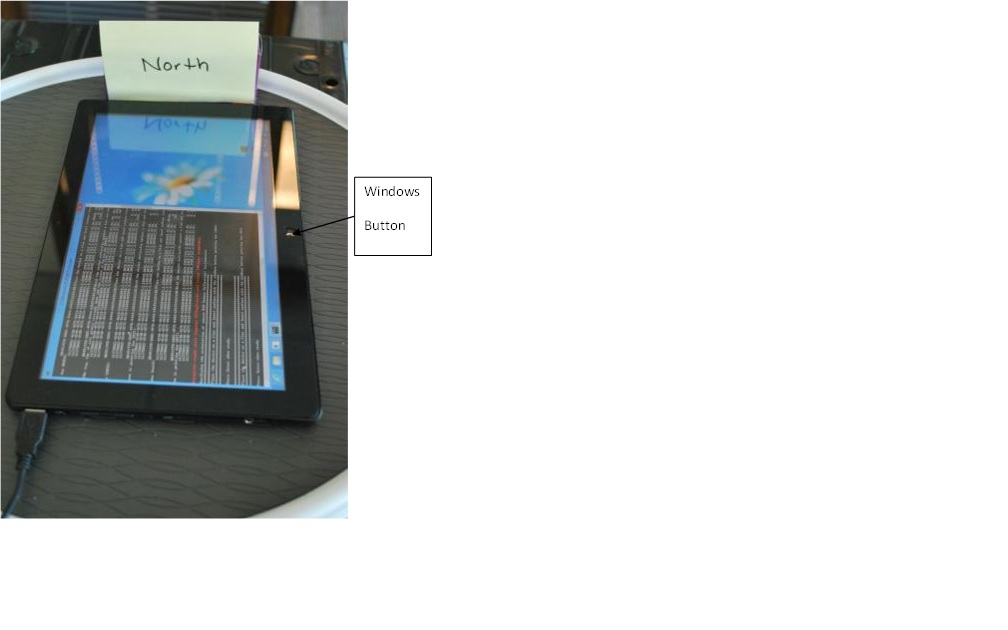
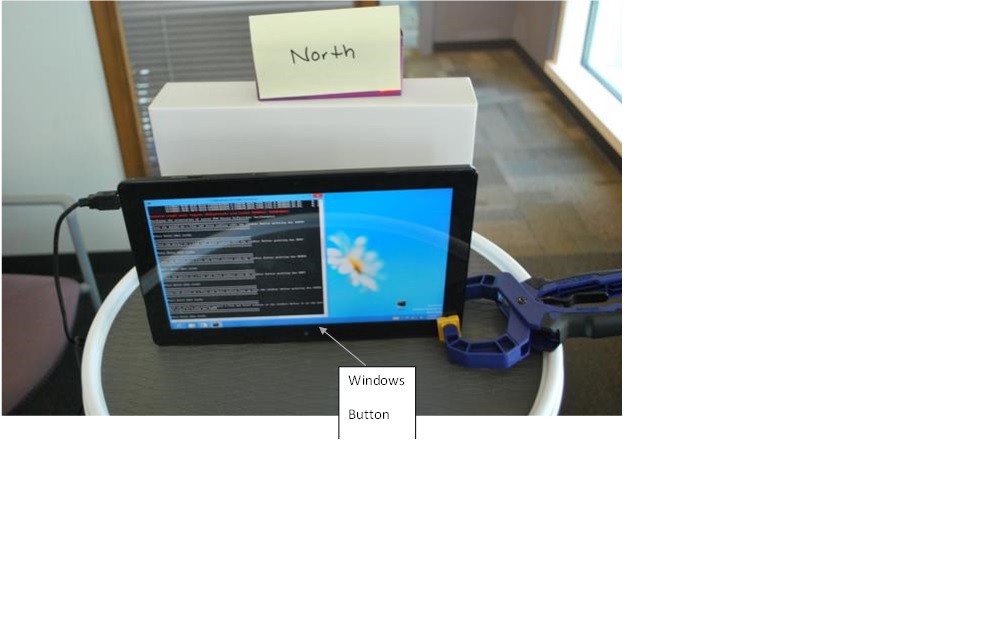
Uji Kompas 2
Sekarang tahan vertikal perangkat dengan tombol Windows di bagian bawah, dengan layar menuju Anda. Arahkan tombol Windows ke utara.
Kompas harus mengembalikan judul mendekati 0 derajat
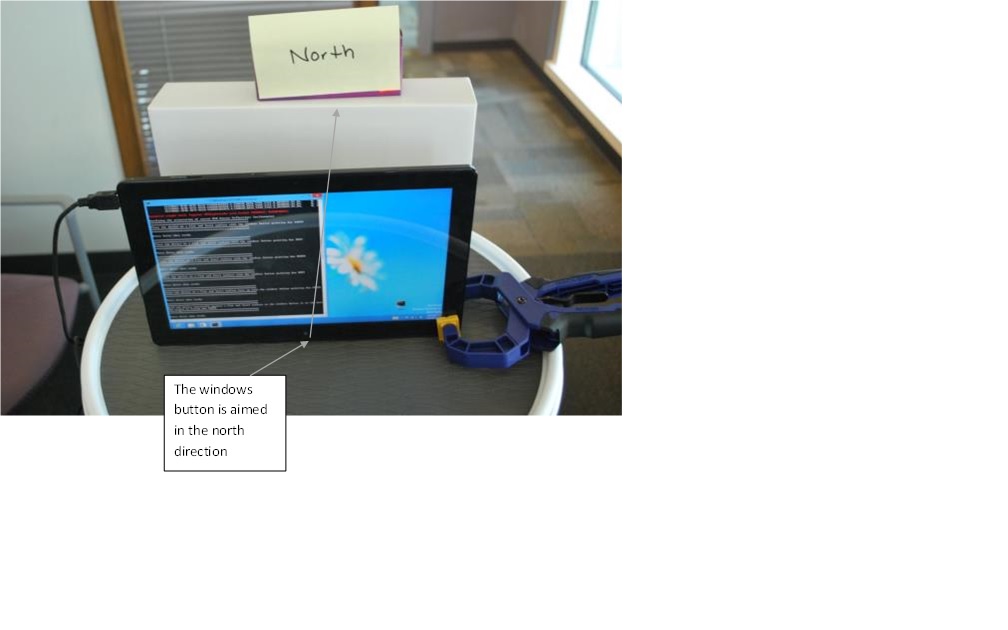
Gambar 13 Uji Kompas 2
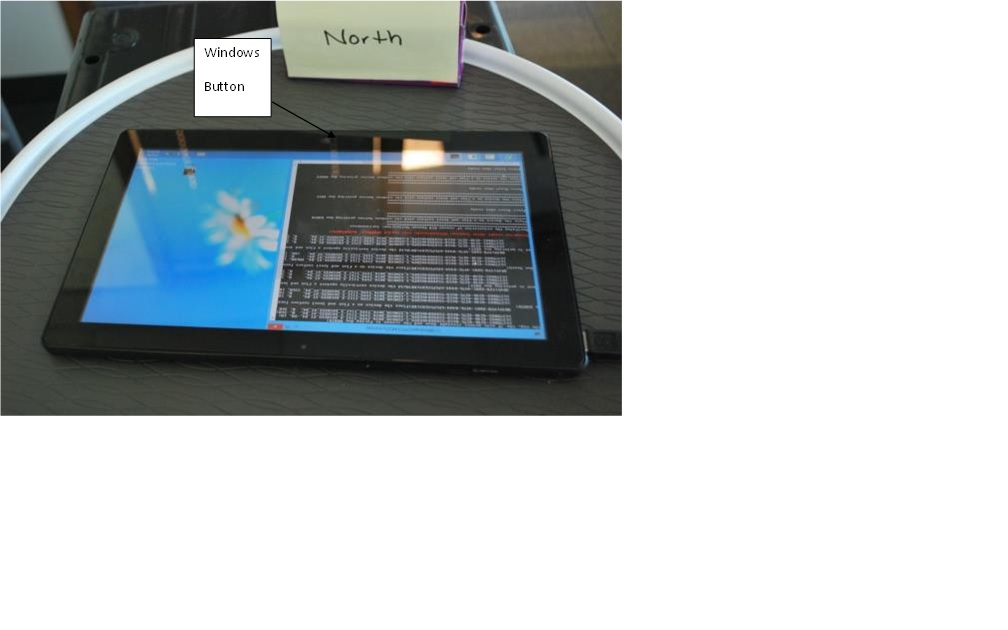
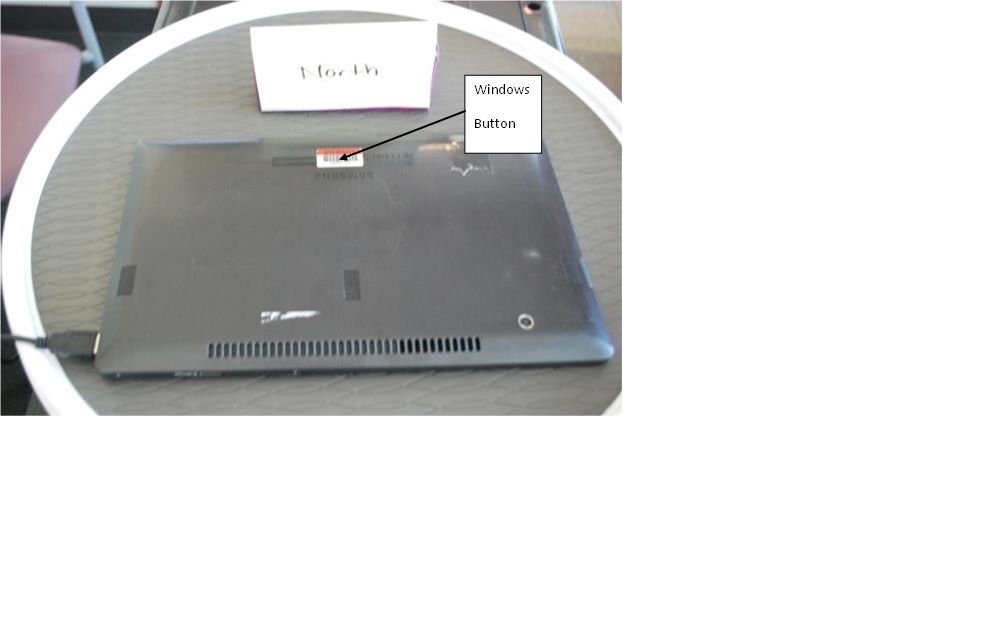
Uji Kompas 3
Sekarang letakkan perangkat datar, layar ke bawah dengan tombol jendela menunjuk ke selatan.
Kompas harus mengembalikan judul mendekati 0 derajat.
Gambar 14 Uji Kompas 3
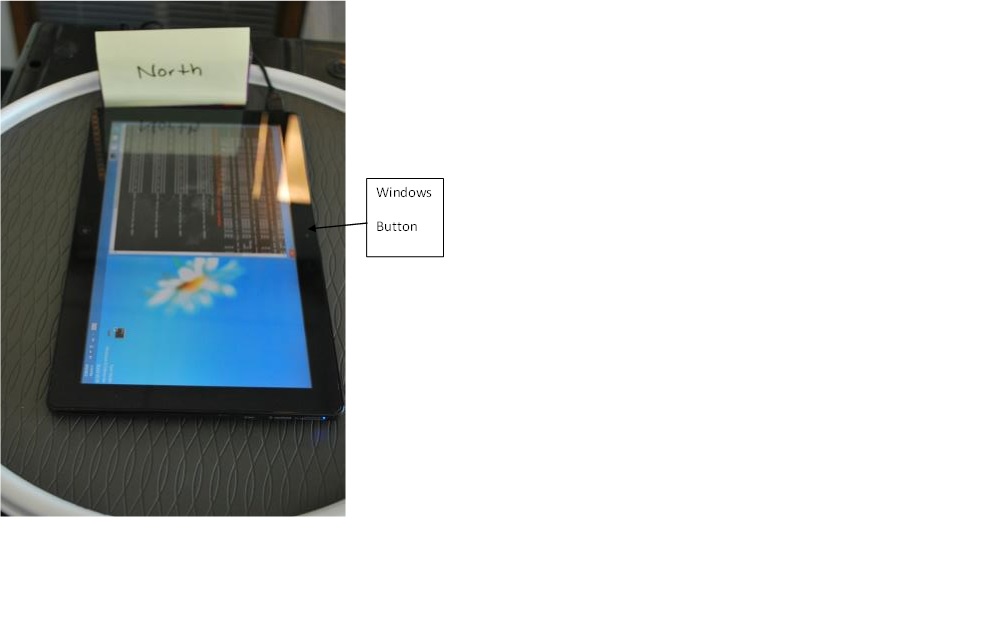
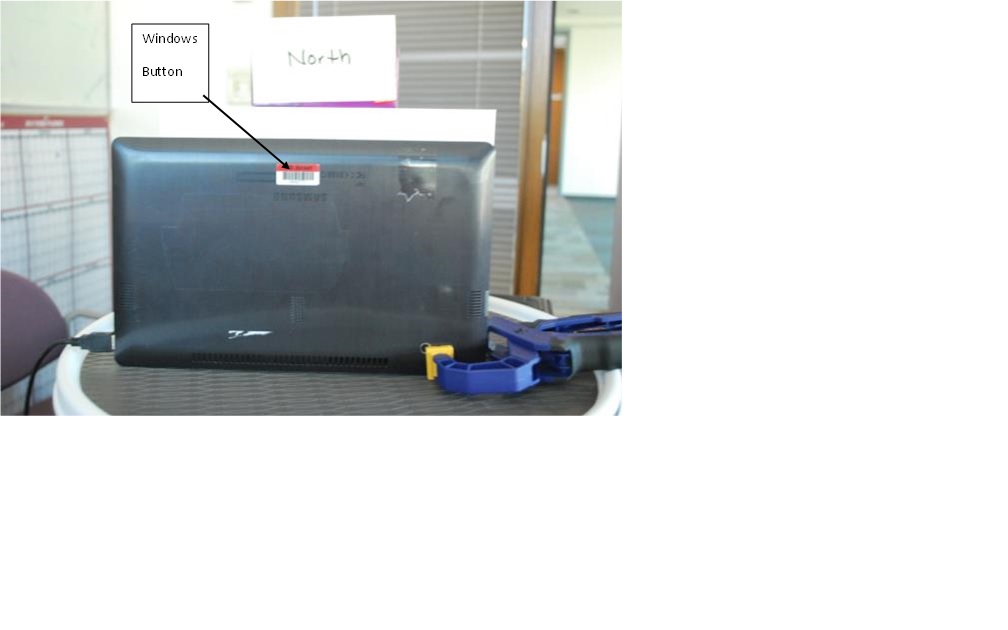
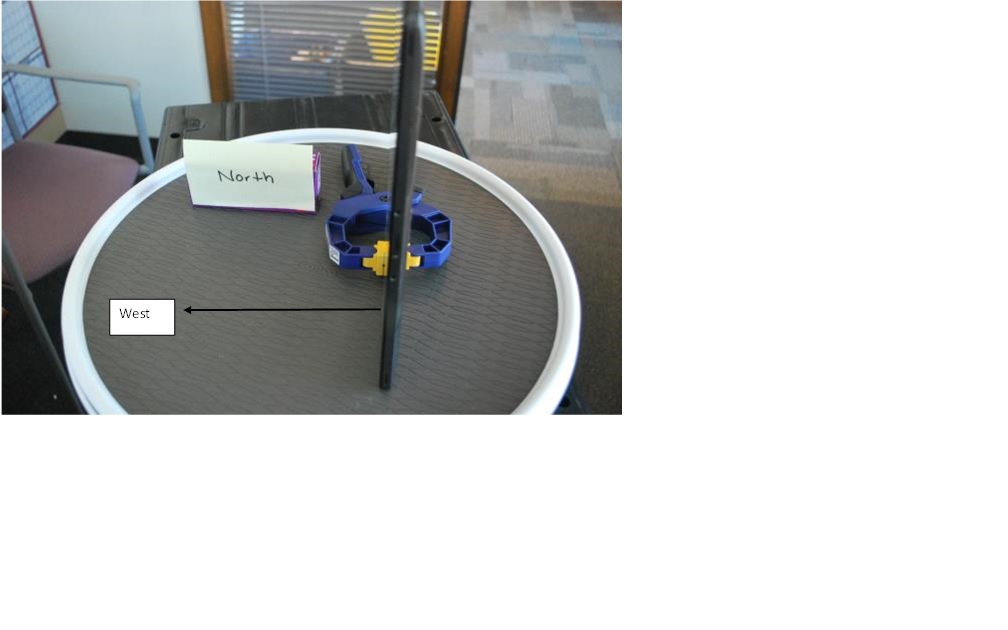
Uji Kompas 4
Sekarang putar layar 90 derajat searah jajar sehingga tombol Windows menunjuk ke Barat.
Kompas harus mengembalikan judul mendekati 90 derajat.

Gambar 15 Uji Kompas 4
Uji Kompas 5
Putar layar 90 derajat lainnya searah jaring jam sehingga tombol Windows menunjuk ke Utara.
Kompas harus mengembalikan judul mendekati 180 derajat.
Gambar 16 Uji Kompas 5
Uji Kompas 6
Putar layar 90 derajat lainnya searah jaring jam sehingga tombol Windows menunjuk ke Arah Timur.
Kompas harus mengembalikan nilai mendekati 270 derajat.
Gambar 17 Uji Kompas 6
Verifikasi Orientasi Sensor - Inklinometer
Berdasarkan panduan dalam whitepaper Sensor Gerakan dan Orientasi Integrasi, implementasi inklinometer dapat menggunakan data dari akselerometer, giroskop, dan kompas untuk menentukan nilai sudut Euler.
Pengujian akan memungkinkan kesalahan sudut +/- 10 derajat.
Penting
Silakan lihat bagian Validasi Sudut Euler dari whitepaper Sensor Gerakan dan Orientasi Integrasi untuk sudut yang diharapkan untuk setiap tes inklinometer.
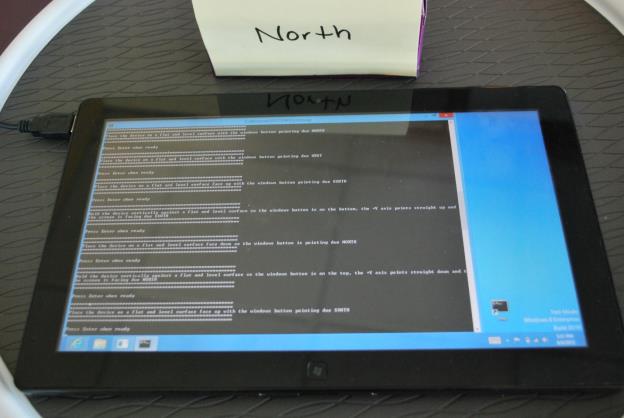
Uji Inklinometer 1
Tempatkan perangkat pada permukaan datar dan tingkat dengan tombol jendela menunjuk ke SELATAN.
Gambar 18 Tes Inklinometer 1
Tes Inklinometer 2
Tempatkan perangkat pada permukaan datar dan tingkat dengan tombol jendela menunjuk ke TIMUR.
Gambar 19 Tes Inklinometer 2
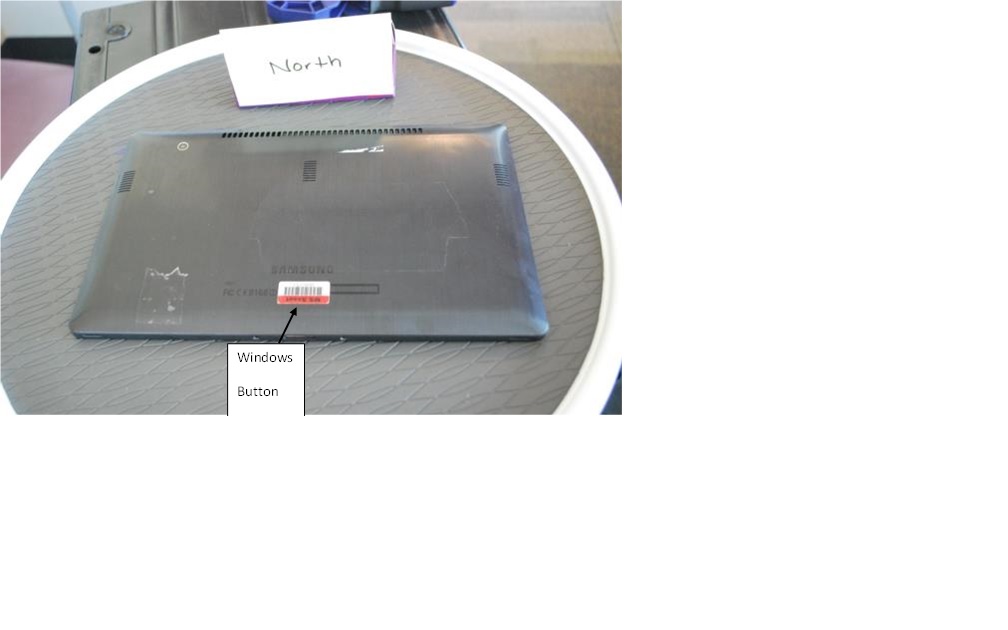
Uji Inklinometer 3
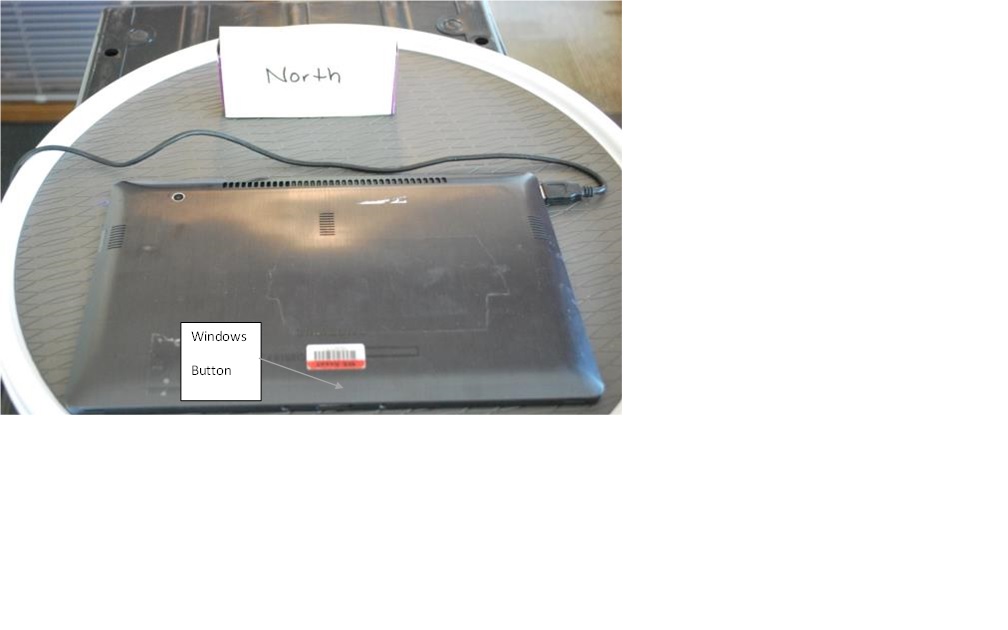
Tempatkan perangkat pada permukaan datar dan tingkat dengan tombol jendela yang menunjuk ke UTARA.
Gambar 20 Tes Inklinometer 3
Tes Inklinometer 4
Tempatkan perangkat pada permukaan datar dan tingkat dengan tombol jendela yang menunjuk ke BARAT.
Gambar 21 Tes Inklinometer 4
Uji Inklinometer 5
Tempatkan perangkat pada permukaan datar dan tingkat menghadap ke atas dengan tombol jendela yang menunjuk ke SELATAN.
Gambar 22 Tes Inklinometer 5
Uji Inklinometer 6
Tahan perangkat secara vertikal terhadap permukaan datar dan tingkat sehingga tombol jendela berada di bagian bawah, sumbu +Y menunjuk lurus ke atas dan layar menghadap ke SELATAN.
Gambar 23 Tes Inklinometer 6
Tes Inklinometer 7
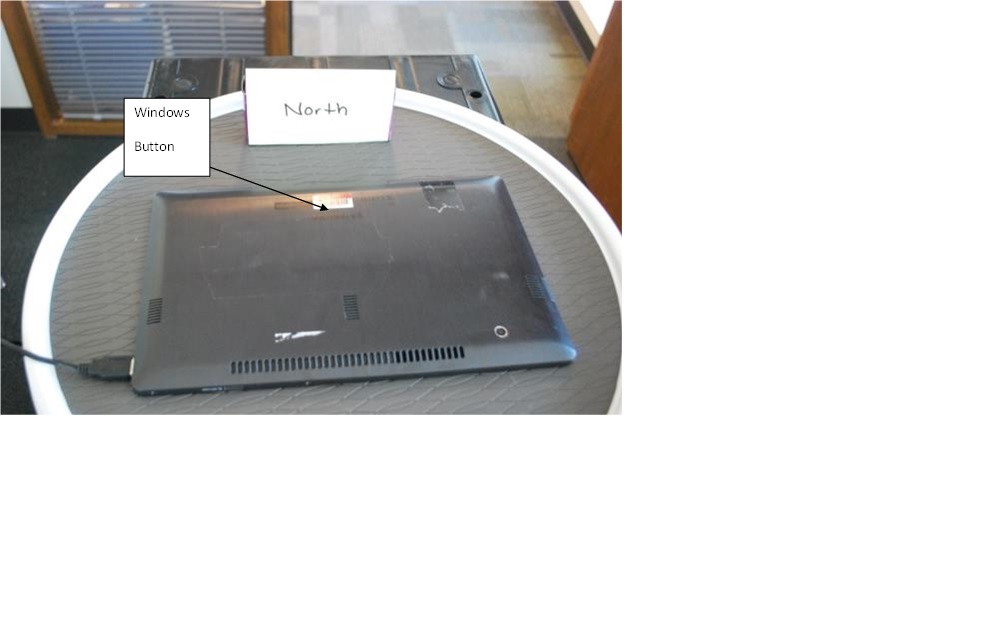
Tempatkan perangkat pada permukaan datar dan tingkat menghadap ke bawah sehingga tombol jendela menunjuk ke UTARA.
Gambar 24 Tes Inklinometer 7
Uji Inklinometer 8
Tahan perangkat secara vertikal terhadap permukaan datar dan tingkat sehingga tombol jendela berada di bagian atas, sumbu +Y menunjuk lurus ke bawah dan layar menghadap ke UTARA.
Gambar 25 Tes Inklinometer 8
Uji Inklinometer 9
Tempatkan perangkat pada permukaan datar dan tingkat menghadap ke atas dengan tombol jendela yang menunjuk ke SELATAN.
Gambar 26 Tes Inklinometer 9
Tes Inklinometer 10
Tahan perangkat secara vertikal terhadap permukaan datar dan tingkat di sisi kanannya sehingga layar menunjuk ke TIMUR.

Gambar 27 Tes Inklinometer 10
Tes Inklinometer 11
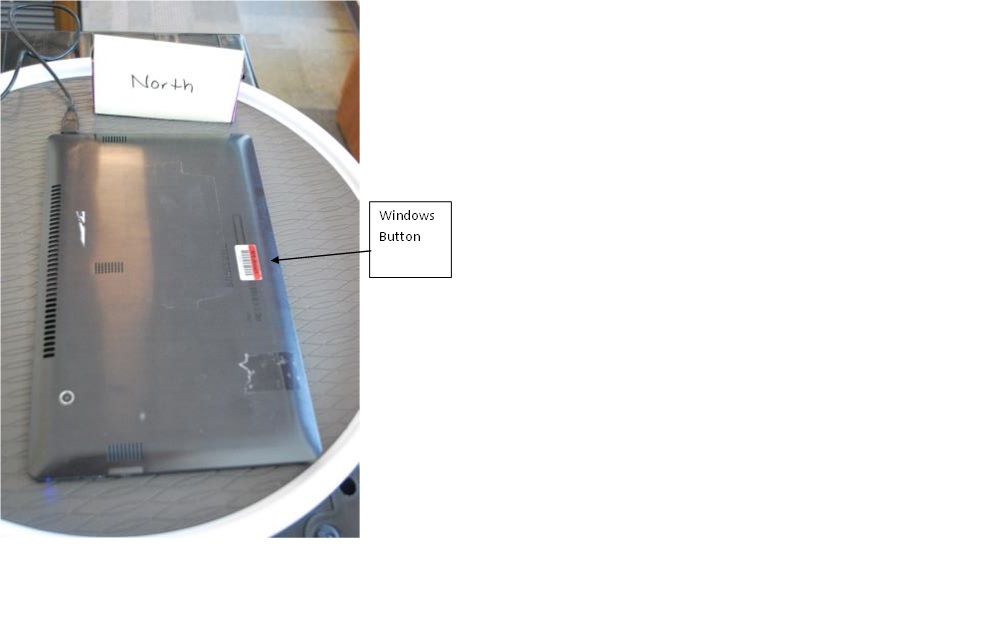
Tempatkan perangkat pada permukaan datar dan tingkat menghadap ke bawah dengan tombol jendela yang menunjuk ke SELATAN.
Gambar 28 Tes Inklinometer 11
Tes Inklinometer 12
Tahan perangkat secara vertikal pada permukaan datar dan tingkat di sisi kirinya sehingga layar menunjuk ke BARAT.
Gambar 29 Tes Inklinometer 12
Memverifikasi Sensor Orientasi Tingkat Lanjut
Sebagian besar implementasi matriks dan kuaternion rotasi akan menggunakan data yang berasal dari akselerometer dan kompas untuk menentukan matriks rotasi dan nilai kuaternion. Penguji disarankan untuk terlebih dahulu memvalidasi nilai akselerometer dan kompas sebelum mencoba menjalankan pengujian orientasi tingkat lanjut.
Pengujian menggunakan produk titik untuk menghitung delta antara vektor yang diharapkan dan vektor yang diambil dari sensor orientasi tingkat lanjut. Tes memungkinkan delta hingga 15 derajat. Jika penguji menemukan bahwa sensor mengembalikan nilai yang berbeda dari yang diharapkan pengujian maka algoritma fusi orientasi harus ditinjau untuk melihat bahwa sensor menghasilkan hasil yang konsisten dengan nilai yang diberikan dalam whitepaper Sensor Gerakan dan Orientasi Integrasi.
Penting
Silakan lihat bagian Validasi Sudut Euler dari whitepaper Sensor Gerakan dan Orientasi Integrasi untuk nilai matriks kuaternion dan rotasi yang diharapkan.
Uji Sensor Orientasi Tingkat Lanjut 1
Tempatkan perangkat pada permukaan tingkat datar, menyaring dengan tombol jendela menunjuk ke selatan.
Gambar 30 Uji Sensor Orientasi Tingkat Lanjut 1
Uji Sensor Orientasi Tingkat Lanjut 2
Tempatkan perangkat pada permukaan tingkat datar, menyaring dengan tombol jendela menunjuk ke TIMUR.
Gambar 31 Uji Sensor Orientasi Tingkat Lanjut 2
Uji Sensor Orientasi Tingkat Lanjut 3
Tempatkan perangkat pada permukaan tingkat datar, menyaring dengan tombol jendela menunjuk ke UTARA.
Gambar 32 Uji Sensor Orientasi Tingkat Lanjut 3
Uji Sensor Orientasi Tingkat Lanjut 4
Tempatkan perangkat pada permukaan tingkat datar, menyaring dengan tombol jendela menunjuk karena BARAT.

Gambar 33 Uji Sensor Orientasi Tingkat Lanjut 4
Uji Sensor Orientasi Tingkat Lanjut 5
Tempatkan perangkat pada permukaan tingkat datar, menyaring dengan tombol jendela menunjuk ke selatan.
Gambar 34 Uji Sensor Orientasi Tingkat Lanjut 5
Uji Sensor Orientasi Tingkat Lanjut 6
Tahan perangkat secara vertikal dengan tombol jendela di bagian bawah dan tombol jendela menunjuk ke arah SELATAN.
Gambar 35 Uji Sensor Orientasi Tingkat Lanjut 6
Uji Sensor Orientasi Tingkat Lanjut 7
Tempatkan perangkat pada permukaan tingkat datar dengan layar ke bawah dan tombol jendela menunjuk ke UTARA.
Gambar 36 Uji Sensor Orientasi Tingkat Lanjut 7
Uji Sensor Orientasi Tingkat Lanjut 8
Tempatkan perangkat pada permukaan tingkat datar dengan layar ke bawah dan tombol jendela menunjuk ke UTARA.

Gambar 37 Uji Sensor Orientasi Tingkat Lanjut 8
Uji Sensor Orientasi Tingkat Lanjut 9
Tempatkan perangkat pada permukaan tingkat datar, menyaring dengan tombol jendela menunjuk ke selatan.
Gambar 38 Uji Sensor Orientasi Tingkat Lanjut 9
Uji Sensor Orientasi Tingkat Lanjut 10
Tahan perangkat secara vertikal dengan tombol jendela di samping, sisi kiri di atas, dan tombol jendela menunjuk ke ARAH TIMUR.

Gambar 39 Uji Sensor Orientasi Tingkat Lanjut 10
Uji Sensor Orientasi Tingkat Lanjut 11
Tempatkan perangkat pada permukaan tingkat datar dengan layar ke bawah dan tombol jendela menunjuk ke selatan.
Gambar 40 Uji Sensor Orientasi Tingkat Lanjut 11
Uji Sensor Orientasi Tingkat Lanjut 12
Tahan perangkat secara vertikal dengan tombol jendela di samping, sisi kiri di bawah, dan tombol jendela menunjuk ke BARAT.
Gambar 41 Uji Sensor Orientasi Tingkat Lanjut 12