Azure Kinect DK の座標系
この記事では、2D および 3D 座標系に使用される規則について説明します。 各センサーのデバイスに関連付けられている個別の座標系と、それらの間で点を変換することを許可された較正関数が存在します。 変換関数は、座標系の間で画像全体を変換します。
2D 座標系
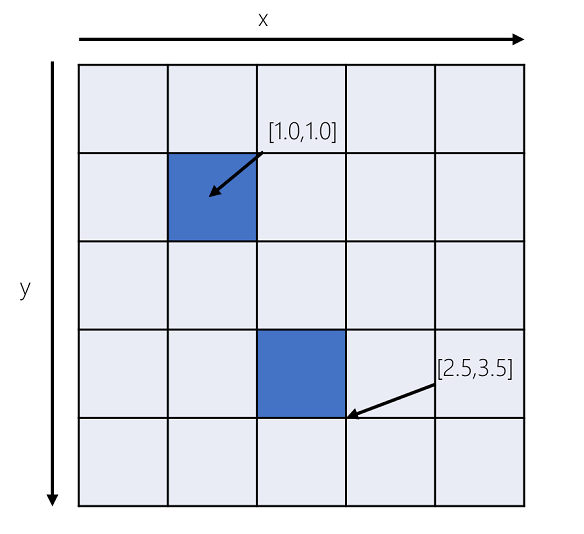
深度カメラとカラー カメラはどちらも、独立した 2D 座標系に関連付けられています。 [x,y] 座標は、ピクセルの単位で表されます。ここで、x は 0 ~ (幅 - 1)、y は 0 ~ (高さ - 1) の範囲の値です。 幅と高さは、深度カメラとカラー カメラが動作する選択されたモードによって異なります。 ピクセル座標 [0,0] は、画像の左上のピクセルに対応します。 ピクセル座標を、サブピクセル座標を表す少数にすることができます。
2D 座標系は中心が 0 です。つまり、次に示すように、サブピクセル座標 [0.0, 0.0] は中心を表し、[0.5,0.5] はピクセルの右下隅を表します。
3D 座標系
各カメラ、加速度計、ジャイロスコープは、独立した 3D 座標空間に関連付けられています。
3D 座標系の点はメトリック [X,Y,Z]、つまり、ミリメートルの単位を持つ座標トリプレットとして表されます。
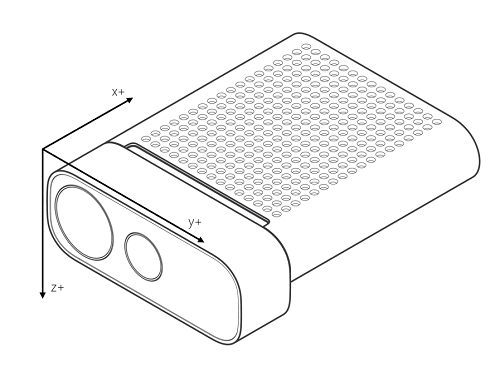
深度カメラとカラー カメラ
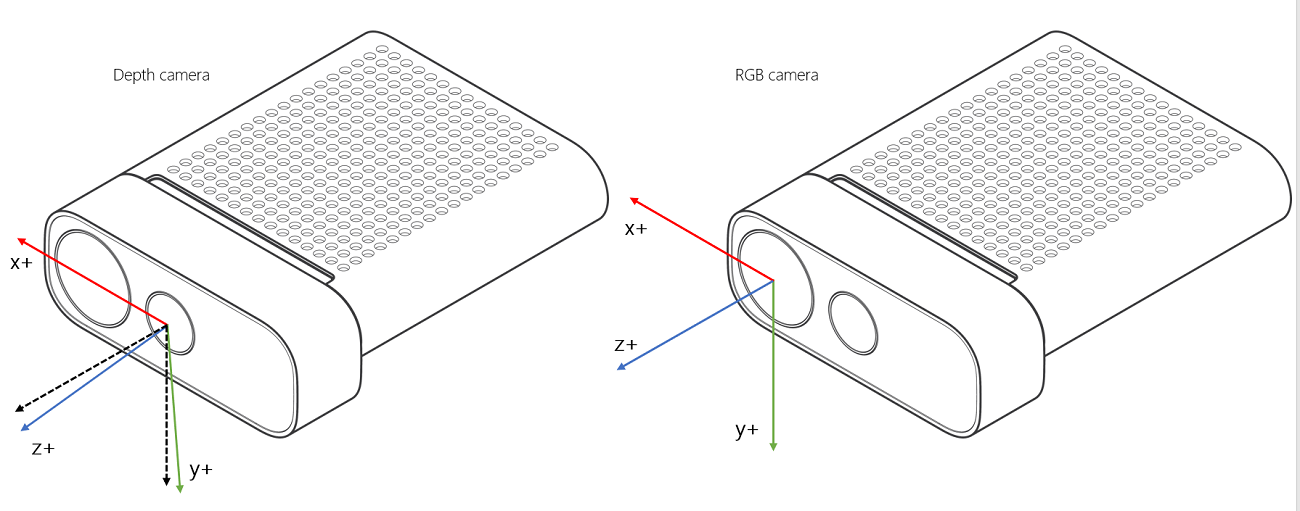
原点 [0,0,0] は、カメラの焦点にあります。 この座標系は、正の X 軸が右を指し、正の Y 軸が下を指し、正の Z 軸が前方を指すようになっています。
深度カメラは、下に示すように、カラー カメラの 6 度下向きに傾いています。
深度カメラによって使用される発光体は 2 つあります。 狭視野 (NFOV) モードで使用される発光体は深度カメラのケースに位置合わせされているため、発光体は傾いていません。 広視野 (WFOV) モードで使用される発光体は、深度カメラを基準としてさらに 1.3 度下向きに傾いています。
ジャイロスコープと加速度計
ジャイロスコープの原点 [0,0,0] は、深度カメラの原点と同じです。 加速度計の原点は、その物理的な場所と一致しています。 加速度計とジャイロスコープの座標系は、どちらも右手系です。 次に示すように、この座標系の正の X 軸は後方を指し、正の Y 軸は左を指し、正の Z 軸は下を指します。