Notatka
Dostęp do tej strony wymaga autoryzacji. Może spróbować zalogować się lub zmienić katalogi.
Dostęp do tej strony wymaga autoryzacji. Możesz spróbować zmienić katalogi.
W tej ostatniej sekcji wyjaśniono, jak utworzyć prostą aplikację platformy UWP z graficznym interfejsem użytkownika, aby przesyłać strumieniowo kamerę internetową i wykrywać obiekty, oceniając nasz model YOLO za pomocą systemu Windows ML.
Tworzenie aplikacji platformy UWP w programie Visual Studio
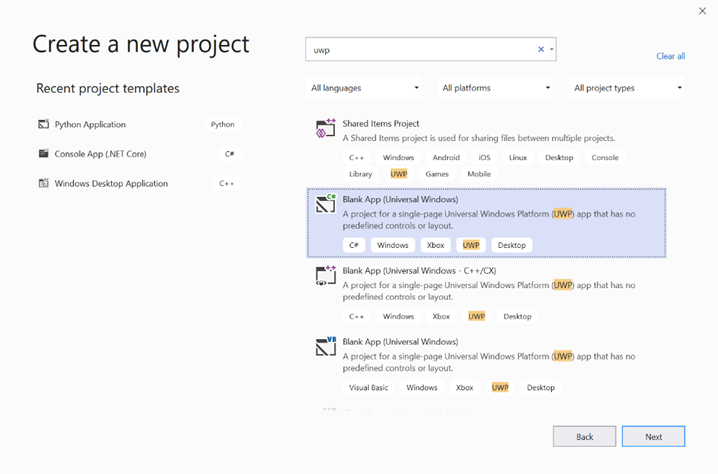
- Otwórz program Visual Studio i wybierz pozycję
Create a new project.Wyszukaj platformę UWP i wybierz pozycjęBlank App (Universal Windows).
- Na następnej stronie skonfiguruj ustawienia projektu, nadając projektowi nazwę i lokalizację. Następnie wybierz docelową i minimalną wersję systemu operacyjnego aplikacji. Aby korzystać z interfejsów API uczenia maszynowego systemu Windows, musisz użyć języka X lub wybrać pakiet NuGet do obsługi do X. Jeśli zdecydujesz się używać pakietu NuGet, postępuj zgodnie z tymi instrukcjami [link].
Wywołaj interfejsy API Windows ML, aby ocenić model.
Krok 1: Użyj generatora kodu uczenia maszynowego do generowania klas opakowujących dla interfejsów API Windows ML.
Krok 2. Modyfikowanie wygenerowanego kodu w wygenerowanych plikach .cs. Końcowy plik wygląda następująco:
using System;
using System.Collections.Generic;
using System.Threading.Tasks;
using Windows.Media;
using Windows.Storage;
using Windows.Storage.Streams;
using Windows.AI.MachineLearning;
namespace yolodemo
{
public sealed class YoloInput
{
public TensorFloat input_100; // shape(-1,3,416,416)
}
public sealed class YoloOutput
{
public TensorFloat concat_1600; // shape(-1,-1,-1)
}
public sealed class YoloModel
{
private LearningModel model;
private LearningModelSession session;
private LearningModelBinding binding;
public static async Task<YoloModel> CreateFromStreamAsync(IRandomAccessStreamReference stream)
{
YoloModel learningModel = new YoloModel();
learningModel.model = await LearningModel.LoadFromStreamAsync(stream);
learningModel.session = new LearningModelSession(learningModel.model);
learningModel.binding = new LearningModelBinding(learningModel.session);
return learningModel;
}
public async Task<YoloOutput> EvaluateAsync(YoloInput input)
{
binding.Bind("input_1:0", input.input_100);
var result = await session.EvaluateAsync(binding, "0");
var output = new YoloOutput();
output.concat_1600 = result.Outputs["concat_16:0"] as TensorFloat;
return output;
}
}
}
Oceń każdą ramkę wideo, aby wykrywać obiekty i rysować pola ograniczenia.
- Dodaj następujące biblioteki do mainPage.xaml.cs.
using System.Threading.Tasks;
using Windows.Devices.Enumeration;
using Windows.Media;
using Windows.Media.Capture;
using Windows.Storage;
using Windows.UI;
using Windows.UI.Xaml.Media.Imaging;
using Windows.UI.Xaml.Shapes;
using Windows.AI.MachineLearning;
- Dodaj następujące zmienne w pliku
public sealed partial class MainPage : Page.
private MediaCapture _media_capture;
private LearningModel _model;
private LearningModelSession _session;
private LearningModelBinding _binding;
private readonly SolidColorBrush _fill_brush = new SolidColorBrush(Colors.Transparent);
private readonly SolidColorBrush _line_brush = new SolidColorBrush(Colors.DarkGreen);
private readonly double _line_thickness = 2.0;
private readonly string[] _labels =
{
"<list of labels>"
};
- Utwórz strukturę sposobu formatowania wyników wykrywania.
internal struct DetectionResult
{
public string label;
public List<float> bbox;
public double prob;
}
- Utwórz obiekt porównujący, który porównuje dwa obiekty typu Box. Ta klasa będzie używana do rysowania pól ograniczenia wokół wykrytych obiektów.
class Comparer : IComparer<DetectionResult>
{
public int Compare(DetectionResult x, DetectionResult y)
{
return y.prob.CompareTo(x.prob);
}
}
- Dodaj następującą metodę, aby zainicjować strumień kamery internetowej urządzenia i rozpocząć przetwarzanie każdej ramki w celu wykrycia obiektów.
private async Task InitCameraAsync()
{
if (_media_capture == null || _media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.Shutdown || _media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.NotStreaming)
{
if (_media_capture != null)
{
_media_capture.Dispose();
}
MediaCaptureInitializationSettings settings = new MediaCaptureInitializationSettings();
var cameras = await DeviceInformation.FindAllAsync(DeviceClass.VideoCapture);
var camera = cameras.FirstOrDefault();
settings.VideoDeviceId = camera.Id;
_media_capture = new MediaCapture();
await _media_capture.InitializeAsync(settings);
WebCam.Source = _media_capture;
}
if (_media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.NotStreaming)
{
await _media_capture.StartPreviewAsync();
WebCam.Visibility = Visibility.Visible;
}
ProcessFrame();
}
- Dodaj następującą metodę, aby przetwarzać każdą ramkę. Ta metoda wywołuje metody EvaluateFrame i DrawBoxes, które zostaną zaimplementowane w późniejszym kroku.
private async Task ProcessFrame()
{
var frame = new VideoFrame(Windows.Graphics.Imaging.BitmapPixelFormat.Bgra8, (int)WebCam.Width, (int)WebCam.Height);
await _media_capture.GetPreviewFrameAsync(frame);
var results = await EvaluateFrame(frame);
await DrawBoxes(results.ToArray(), frame);
ProcessFrame();
}
- Tworzenie nowego zmiennoprzecinka Sigmoid
private float Sigmoid(float val)
{
var x = (float)Math.Exp(val);
return x / (1.0f + x);
}
- Utwórz próg do poprawnego wykrywania obiektów.
private float ComputeIOU(DetectionResult DRa, DetectionResult DRb)
{
float ay1 = DRa.bbox[0];
float ax1 = DRa.bbox[1];
float ay2 = DRa.bbox[2];
float ax2 = DRa.bbox[3];
float by1 = DRb.bbox[0];
float bx1 = DRb.bbox[1];
float by2 = DRb.bbox[2];
float bx2 = DRb.bbox[3];
Debug.Assert(ay1 < ay2);
Debug.Assert(ax1 < ax2);
Debug.Assert(by1 < by2);
Debug.Assert(bx1 < bx2);
// determine the coordinates of the intersection rectangle
float x_left = Math.Max(ax1, bx1);
float y_top = Math.Max(ay1, by1);
float x_right = Math.Min(ax2, bx2);
float y_bottom = Math.Min(ay2, by2);
if (x_right < x_left || y_bottom < y_top)
return 0;
float intersection_area = (x_right - x_left) * (y_bottom - y_top);
float bb1_area = (ax2 - ax1) * (ay2 - ay1);
float bb2_area = (bx2 - bx1) * (by2 - by1);
float iou = intersection_area / (bb1_area + bb2_area - intersection_area);
Debug.Assert(iou >= 0 && iou <= 1);
return iou;
}
- Zaimplementuj poniższą listę, aby śledzić bieżące obiekty wykryte w ramce.
private List<DetectionResult> NMS(IReadOnlyList<DetectionResult> detections,
float IOU_threshold = 0.45f,
float score_threshold=0.3f)
{
List<DetectionResult> final_detections = new List<DetectionResult>();
for (int i = 0; i < detections.Count; i++)
{
int j = 0;
for (j = 0; j < final_detections.Count; j++)
{
if (ComputeIOU(final_detections[j], detections[i]) > IOU_threshold)
{
break;
}
}
if (j==final_detections.Count)
{
final_detections.Add(detections[i]);
}
}
return final_detections;
}
- Zaimplementuj następującą metodę.
private List<DetectionResult> ParseResult(float[] results)
{
int c_values = 84;
int c_boxes = results.Length / c_values;
float confidence_threshold = 0.5f;
List<DetectionResult> detections = new List<DetectionResult>();
this.OverlayCanvas.Children.Clear();
for (int i_box = 0; i_box < c_boxes; i_box++)
{
float max_prob = 0.0f;
int label_index = -1;
for (int j_confidence = 4; j_confidence < c_values; j_confidence++)
{
int index = i_box * c_values + j_confidence;
if (results[index] > max_prob)
{
max_prob = results[index];
label_index = j_confidence - 4;
}
}
if (max_prob > confidence_threshold)
{
List<float> bbox = new List<float>();
bbox.Add(results[i_box * c_values + 0]);
bbox.Add(results[i_box * c_values + 1]);
bbox.Add(results[i_box * c_values + 2]);
bbox.Add(results[i_box * c_values + 3]);
detections.Add(new DetectionResult()
{
label = _labels[label_index],
bbox = bbox,
prob = max_prob
});
}
}
return detections;
}
- Dodaj następującą metodę, aby narysować pola wokół obiektów wykrytych w ramce.
private async Task DrawBoxes(float[] results, VideoFrame frame)
{
List<DetectionResult> detections = ParseResult(results);
Comparer cp = new Comparer();
detections.Sort(cp);
IReadOnlyList<DetectionResult> final_detetions = NMS(detections);
for (int i=0; i < final_detetions.Count; ++i)
{
int top = (int)(final_detetions[i].bbox[0] * WebCam.Height);
int left = (int)(final_detetions[i].bbox[1] * WebCam.Width);
int bottom = (int)(final_detetions[i].bbox[2] * WebCam.Height);
int right = (int)(final_detetions[i].bbox[3] * WebCam.Width);
var brush = new ImageBrush();
var bitmap_source = new SoftwareBitmapSource();
await bitmap_source.SetBitmapAsync(frame.SoftwareBitmap);
brush.ImageSource = bitmap_source;
// brush.Stretch = Stretch.Fill;
this.OverlayCanvas.Background = brush;
var r = new Rectangle();
r.Tag = i;
r.Width = right - left;
r.Height = bottom - top;
r.Fill = this._fill_brush;
r.Stroke = this._line_brush;
r.StrokeThickness = this._line_thickness;
r.Margin = new Thickness(left, top, 0, 0);
this.OverlayCanvas.Children.Add(r);
// Default configuration for border
// Render text label
var border = new Border();
var backgroundColorBrush = new SolidColorBrush(Colors.Black);
var foregroundColorBrush = new SolidColorBrush(Colors.SpringGreen);
var textBlock = new TextBlock();
textBlock.Foreground = foregroundColorBrush;
textBlock.FontSize = 18;
textBlock.Text = final_detetions[i].label;
// Hide
textBlock.Visibility = Visibility.Collapsed;
border.Background = backgroundColorBrush;
border.Child = textBlock;
Canvas.SetLeft(border, final_detetions[i].bbox[1] * 416 + 2);
Canvas.SetTop(border, final_detetions[i].bbox[0] * 416 + 2);
textBlock.Visibility = Visibility.Visible;
// Add to canvas
this.OverlayCanvas.Children.Add(border);
}
}
- Teraz, gdy zajęliśmy się niezbędną infrastrukturą, nadszedł czas na włączenie samej oceny. Ta metoda ocenia model względem bieżącej ramki w celu wykrywania obiektów.
private async Task<List<float>> EvaluateFrame(VideoFrame frame)
{
_binding.Clear();
_binding.Bind("input_1:0", frame);
var results = await _session.EvaluateAsync(_binding, "");
Debug.Print("output done\n");
TensorFloat result = results.Outputs["Identity:0"] as TensorFloat;
var shape = result.Shape;
var data = result.GetAsVectorView();
return data.ToList<float>();
}
- Nasza aplikacja musi się w jakiś sposób uruchomić. Dodaj metodę rozpoczynającą strumień kamery internetowej i ocenę modelu po naciśnięciu
Goprzycisku przez użytkownika.
private void button_go_Click(object sender, RoutedEventArgs e)
{
InitModelAsync();
InitCameraAsync();
}
- Dodaj metodę w celu wywołania interfejsów API uczenia maszynowego systemu Windows w celu oceny modelu. Najpierw model jest ładowany z magazynu, a następnie tworzona jest sesja i przypisana do pamięci.
private async Task InitModelAsync()
{
var model_file = await StorageFile.GetFileFromApplicationUriAsync(new Uri("ms-appx:///Assets//Yolo.onnx"));
_model = await LearningModel.LoadFromStorageFileAsync(model_file);
var device = new LearningModelDevice(LearningModelDeviceKind.Cpu);
_session = new LearningModelSession(_model, device);
_binding = new LearningModelBinding(_session);
}
Uruchamianie aplikacji
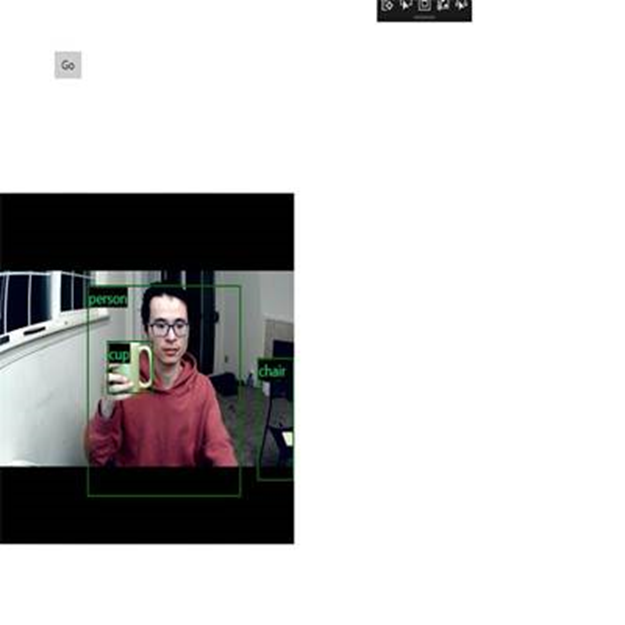
Aplikacja wykrywania obiektów w czasie rzeczywistym została pomyślnie utworzona!
Run Wybierz przycisk na górnym pasku programu Visual Studio, aby uruchomić aplikację. Aplikacja powinna wyglądać następująco.
Dodatkowe zasoby
Aby dowiedzieć się więcej o tematach wymienionych w tym samouczku, odwiedź następujące zasoby:
- Narzędzia Windows ML: Poznaj więcej narzędzi, takich jak Windows ML Dashboard, WinMLRunner i generator kodu Windows ML mglen.
- Model ONNX: dowiedz się więcej o formacie ONNX.
- Wydajność i pamięć uczenia maszynowego systemu Windows: dowiedz się więcej na temat zarządzania wydajnością aplikacji za pomocą uczenia maszynowego systemu Windows.
- Dokumentacja interfejsu API usługi Windows Machine Learning: dowiedz się więcej o trzech obszarach interfejsów API uczenia maszynowego systemu Windows.