Nota
O acesso a esta página requer autorização. Pode tentar iniciar sessão ou alterar os diretórios.
O acesso a esta página requer autorização. Pode tentar alterar os diretórios.
Os pinos de E/S de uso geral (GPIO) podem ser configurados para receber sinais elétricos como entrada. No seu nível mais básico, isso é útil para cenários que detetam a abertura/fechamento de um circuito. Esses circuitos podem incluir botões de pressão, interruptores de comutação, interruptores de palheta, pressostatos e outros dispositivos que representam os valores binários (ligado/desligado) ao completarem um circuito.
Neste tutorial, vais usar .NET e os pinos GPIO do teu Raspberry Pi para detetar a abertura e o fecho de um circuito.
Pré-requisitos
- Computador de placa única (SBC) baseado em ARM (ARMv7 ou superior)
- Fios de ligação
- Placa de ensaio (opcional)
- Placa de expansão GPIO para Raspberry Pi (opcional)
- .NET SDK 10 ou posterior
Observação
Este tutorial foi escrito assumindo que o dispositivo alvo é o Raspberry Pi. No entanto, este tutorial pode ser usado para qualquer SBC baseado em Linux que suporte .NET, como Orange Pi, ODROID e outros.
Certifique-se de que o SSH está ativado no seu dispositivo. Para o Raspberry Pi, consulte Configurando um servidor SSH na documentação do Raspberry Pi.
Preparar o hardware
Use os componentes de hardware para construir o circuito conforme descrito no diagrama a seguir:

A imagem acima mostra uma conexão direta entre um pino de terra e o pino 21.
Sugestão
O diagrama mostra uma placa de ensaio e uma expansão GPIO para fins ilustrativos, mas pode simplesmente conectar um pino de terra com o pino 21 com um fio de ligação no Raspberry Pi.
Consulte o diagrama de pinagem abaixo, conforme necessário.

Imagem cortesia da Raspberry Pi Foundation.
Criar a aplicação
Conclua as seguintes etapas em seu ambiente de desenvolvimento preferido:
Crie uma nova aplicação de consola .NET usando .NET CLI ou Visual Studio. Chame-lhe InputTutorial.
dotnet new console -o InputTutorial cd InputTutorialAdicione o pacote System.Device.Gpio ao projeto. Use .NET CLI do diretório do projeto ou Visual Studio.
dotnet package add System.Device.Gpio --version 4.0.1Substitua o conteúdo do Program.cs pelo seguinte código:
using System.Device.Gpio; using System.Threading.Tasks; const int Pin = 21; const string Alert = "ALERT 🚨"; const string Ready = "READY ✅"; using var controller = new GpioController(); controller.OpenPin(Pin, PinMode.InputPullUp); Console.WriteLine( $"Initial status ({DateTime.Now}): {(controller.Read(Pin) == PinValue.High ? Alert : Ready)}"); controller.RegisterCallbackForPinValueChangedEvent( Pin, PinEventTypes.Falling | PinEventTypes.Rising, OnPinEvent); await Task.Delay(Timeout.Infinite); static void OnPinEvent(object sender, PinValueChangedEventArgs args) { Console.WriteLine( $"({DateTime.Now}) {(args.ChangeType is PinEventTypes.Rising ? Alert : Ready)}"); }No código anterior:
- Uma declaração usando cria uma instância de
GpioController. Ausingdeclaração garante que o objeto é eliminado e que os recursos de hardware são devidamente libertados.-
GpioControlleré instanciado sem parâmetros, indicando que deve detetar em que plataforma de hardware está a correr e usar o esquema lógico de numeração de pinos.
-
- O pino GPIO 21 é aberto com
PinMode.InputPullUp.- Isto abre o pino com uma resistência PullUp ativada. Neste modo, quando o pino está ligado à terra, devolverá
PinValue.Low. Quando o pino está desligado do terra e o circuito está aberto, o pino retorna aPinValue.High.
- Isto abre o pino com uma resistência PullUp ativada. Neste modo, quando o pino está ligado à terra, devolverá
- O status inicial é gravado em um console usando uma expressão ternária. O estado atual do pino é lido com
Read(). Se forPinValue.High, escreve a cadeiaAlertpara a consola. Caso contrário, escreve aReadystring. -
RegisterCallbackForPinValueChangedEvent()regista uma função de callback para ambos os eventosPinEventTypes.RisingePinEventTypes.Fallingno pin. Estes eventos correspondem aos estados de pino dePinValue.HighePinValue.Low, respetivamente. - A função de callback aponta para um método chamado
OnPinEvent().OnPinEvent()usa outra expressão ternária que também escreve as strings correspondentesAlertouReady. - O fio principal dorme indefinidamente enquanto espera por eventos de pinos.
- Uma declaração usando cria uma instância de
Crie o aplicativo. Se estiver a usar a CLI .NET, execute
dotnet build. Para construir em Visual Studio, pressione Ctrl+Shift+B.Implante o aplicativo no SBC como um aplicativo independente. Para instruções, consulte Deploy .NET apps para Raspberry Pi. Certifique-se de dar permissão de execução ao executável usando
chmod +x.Execute a aplicação no Raspberry Pi mudando para o diretório de implantação e executando o executável.
./InputTutorialO console exibe texto semelhante ao seguinte:
Initial status (05/10/2022 15:59:25): READY ✅Desconecte o pino 21 da terra. O console exibe texto semelhante ao seguinte:
(05/10/2022 15:59:59) ALERT 🚨Reconecte o pino 21 e conecte-o à terra. O console exibe texto semelhante ao seguinte:
(05/10/2022 16:00:25) READY ✅Termine o programa pressionando Ctrl+C.
Parabéns! Usaste GPIO para detetar entradas usando o System.Device.Gpio pacote NuGet! Existem muitas utilizações para este tipo de entrada. Este exemplo pode ser usado com qualquer cenário em que um switch se conecta ou quebra um circuito. Aqui está um exemplo de usá-lo com um interruptor de palheta magnética, que é frequentemente usado para detetar portas ou janelas abertas.
Fio disparador a laser
Expandindo um pouco mais o conceito do exemplo anterior, vamos dar uma olhada em como isso poderia ser aplicado à criação de um tripwire de laser. A construção de um laser tripwire requer os seguintes componentes adicionais:
- KY-008 módulo transmissor laser
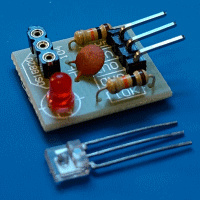
- Módulo sensor receptor laser (ver nota abaixo)
- 2 resistências Ω 10K
Observação
Módulo sensor receptor laser é o nome genérico aplicado a um módulo comum encontrado em muitos retalhistas online. O dispositivo pode variar em nome ou fabricante, mas deve se assemelhar a esta imagem.
Conecte o equipamento sensor laser de disparo
Conecte os componentes conforme detalhado no diagrama a seguir.

Preste muita atenção aos resistores de 10K Ω. Estes implementam um divisor de tensão. Isso ocorre porque o módulo recetor a laser emite 5V para indicar que o feixe está quebrado. O Raspberry Pi suporta apenas até 3,3 V para entrada GPIO. Uma vez que enviar o 5V completo para o pino pode danificar o Raspberry Pi, a corrente do módulo recetor é passada através de um divisor de tensão para reduzir pela metade a tensão para 2,5V.
Aplicar atualizações de código-fonte
Quase se pode usar o mesmo código de antes, com uma exceção. Nos outros exemplos, usámos PinMode.InputPullUp de forma que, quando o pino está desligado da terra e o circuito está aberto, o pino devolve PinValue.High.
No entanto, no caso do módulo recetor laser, não estamos detetando um circuito aberto. Em vez disso, queremos que o pino atue como um dissipador de corrente proveniente do módulo recetor a laser. Neste caso, vamos abrir o pino com PinMode.InputPullDown. Desta forma, o pino regressa PinValue.Low quando não recebe corrente e PinValue.High quando recebe corrente do módulo receptor laser.
controller.OpenPin(pin, PinMode.InputPullDown);
Importante
Certifique-se de que o código implantado no seu Raspberry Pi inclua essa alteração antes de testar um laser tripwire. O programa funciona sem ele, mas usar o modo de entrada errado pode danificar o seu Raspberry Pi!
Obter o código-fonte
A fonte deste tutorial está disponível em GitHub.
Próximos passos
Colabore connosco no GitHub
A origem deste conteúdo pode ser encontrada no GitHub, onde também pode criar e rever problemas e pedidos Pull. Para mais informações, consulte o nosso guia do contribuidor.