Not
Åtkomst till denna sida kräver auktorisation. Du kan prova att logga in eller byta katalog.
Åtkomst till denna sida kräver auktorisation. Du kan prova att byta katalog.
Det här sista avsnittet beskriver hur du skapar en enkel UWP-app med ett GUI för att strömma webbkameran och identifiera objekt genom att utvärdera vår YOLO-modell med Windows ML.
Skapa en UWP-app i Visual Studio
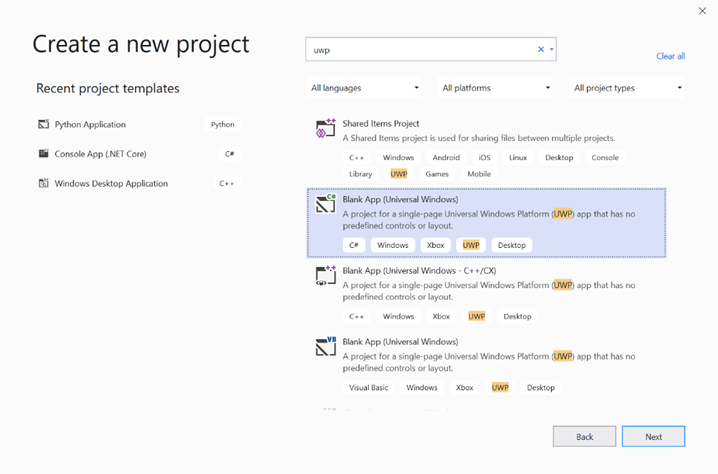
- Öppna Visual Studio och välj
Create a new project.Sök efter UWP och väljBlank App (Universal Windows).
- På nästa sida konfigurerar du dina projektinställningar genom att ge projektet ett namn och en plats. Välj sedan en mål- och lägsta operativsystemversion av din app. Om du vill använda Windows ML-API:er måste du använda X, eller så kan du välja NuGet-paketet för att stödja ned till X. Om du väljer att använda NuGet-paketet följer du dessa instruktioner [länk].
Anropa Windows ML-API:er för att utvärdera modellen
Steg 1: Använd Machine Learning Code Generator för att generera omslutningsklasser för Windows ML-API:er.
Steg 2: Ändra genererad kod i den genererade .cs-filen. Den slutliga filen ser ut så här:
using System;
using System.Collections.Generic;
using System.Threading.Tasks;
using Windows.Media;
using Windows.Storage;
using Windows.Storage.Streams;
using Windows.AI.MachineLearning;
namespace yolodemo
{
public sealed class YoloInput
{
public TensorFloat input_100; // shape(-1,3,416,416)
}
public sealed class YoloOutput
{
public TensorFloat concat_1600; // shape(-1,-1,-1)
}
public sealed class YoloModel
{
private LearningModel model;
private LearningModelSession session;
private LearningModelBinding binding;
public static async Task<YoloModel> CreateFromStreamAsync(IRandomAccessStreamReference stream)
{
YoloModel learningModel = new YoloModel();
learningModel.model = await LearningModel.LoadFromStreamAsync(stream);
learningModel.session = new LearningModelSession(learningModel.model);
learningModel.binding = new LearningModelBinding(learningModel.session);
return learningModel;
}
public async Task<YoloOutput> EvaluateAsync(YoloInput input)
{
binding.Bind("input_1:0", input.input_100);
var result = await session.EvaluateAsync(binding, "0");
var output = new YoloOutput();
output.concat_1600 = result.Outputs["concat_16:0"] as TensorFloat;
return output;
}
}
}
Utvärdera varje videoram för att identifiera objekt och rita avgränsningsrutor.
- Lägg till följande bibliotek i mainPage.xaml.cs.
using System.Threading.Tasks;
using Windows.Devices.Enumeration;
using Windows.Media;
using Windows.Media.Capture;
using Windows.Storage;
using Windows.UI;
using Windows.UI.Xaml.Media.Imaging;
using Windows.UI.Xaml.Shapes;
using Windows.AI.MachineLearning;
- Lägg till följande variabler i
public sealed partial class MainPage : Page.
private MediaCapture _media_capture;
private LearningModel _model;
private LearningModelSession _session;
private LearningModelBinding _binding;
private readonly SolidColorBrush _fill_brush = new SolidColorBrush(Colors.Transparent);
private readonly SolidColorBrush _line_brush = new SolidColorBrush(Colors.DarkGreen);
private readonly double _line_thickness = 2.0;
private readonly string[] _labels =
{
"<list of labels>"
};
- Skapa en struktur för hur identifieringsresultaten formateras.
internal struct DetectionResult
{
public string label;
public List<float> bbox;
public double prob;
}
- Skapa ett Jämförelseobjekt som jämför två objekt av typen Box. Den här klassen används för att rita avgränsningsrutor runt de identifierade objekten.
class Comparer : IComparer<DetectionResult>
{
public int Compare(DetectionResult x, DetectionResult y)
{
return y.prob.CompareTo(x.prob);
}
}
- Lägg till följande metod för att initiera enhetens webbkameraström och börja bearbeta varje bildruta för att identifiera objekt.
private async Task InitCameraAsync()
{
if (_media_capture == null || _media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.Shutdown || _media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.NotStreaming)
{
if (_media_capture != null)
{
_media_capture.Dispose();
}
MediaCaptureInitializationSettings settings = new MediaCaptureInitializationSettings();
var cameras = await DeviceInformation.FindAllAsync(DeviceClass.VideoCapture);
var camera = cameras.FirstOrDefault();
settings.VideoDeviceId = camera.Id;
_media_capture = new MediaCapture();
await _media_capture.InitializeAsync(settings);
WebCam.Source = _media_capture;
}
if (_media_capture.CameraStreamState == Windows.Media.Devices.CameraStreamState.NotStreaming)
{
await _media_capture.StartPreviewAsync();
WebCam.Visibility = Visibility.Visible;
}
ProcessFrame();
}
- Lägg till följande metod för att bearbeta varje bildruta. Den här metoden anropar EvaluateFrame och DrawBoxes, som vi implementerar i ett senare steg.
private async Task ProcessFrame()
{
var frame = new VideoFrame(Windows.Graphics.Imaging.BitmapPixelFormat.Bgra8, (int)WebCam.Width, (int)WebCam.Height);
await _media_capture.GetPreviewFrameAsync(frame);
var results = await EvaluateFrame(frame);
await DrawBoxes(results.ToArray(), frame);
ProcessFrame();
}
- Skapa en ny Sigmoid-flyttal
private float Sigmoid(float val)
{
var x = (float)Math.Exp(val);
return x / (1.0f + x);
}
- Skapa ett tröskelvärde för att identifiera objekt korrekt.
private float ComputeIOU(DetectionResult DRa, DetectionResult DRb)
{
float ay1 = DRa.bbox[0];
float ax1 = DRa.bbox[1];
float ay2 = DRa.bbox[2];
float ax2 = DRa.bbox[3];
float by1 = DRb.bbox[0];
float bx1 = DRb.bbox[1];
float by2 = DRb.bbox[2];
float bx2 = DRb.bbox[3];
Debug.Assert(ay1 < ay2);
Debug.Assert(ax1 < ax2);
Debug.Assert(by1 < by2);
Debug.Assert(bx1 < bx2);
// determine the coordinates of the intersection rectangle
float x_left = Math.Max(ax1, bx1);
float y_top = Math.Max(ay1, by1);
float x_right = Math.Min(ax2, bx2);
float y_bottom = Math.Min(ay2, by2);
if (x_right < x_left || y_bottom < y_top)
return 0;
float intersection_area = (x_right - x_left) * (y_bottom - y_top);
float bb1_area = (ax2 - ax1) * (ay2 - ay1);
float bb2_area = (bx2 - bx1) * (by2 - by1);
float iou = intersection_area / (bb1_area + bb2_area - intersection_area);
Debug.Assert(iou >= 0 && iou <= 1);
return iou;
}
- Implementera följande lista för att spåra de aktuella objekten som identifierats i ramen.
private List<DetectionResult> NMS(IReadOnlyList<DetectionResult> detections,
float IOU_threshold = 0.45f,
float score_threshold=0.3f)
{
List<DetectionResult> final_detections = new List<DetectionResult>();
for (int i = 0; i < detections.Count; i++)
{
int j = 0;
for (j = 0; j < final_detections.Count; j++)
{
if (ComputeIOU(final_detections[j], detections[i]) > IOU_threshold)
{
break;
}
}
if (j==final_detections.Count)
{
final_detections.Add(detections[i]);
}
}
return final_detections;
}
- Implementera följande metod.
private List<DetectionResult> ParseResult(float[] results)
{
int c_values = 84;
int c_boxes = results.Length / c_values;
float confidence_threshold = 0.5f;
List<DetectionResult> detections = new List<DetectionResult>();
this.OverlayCanvas.Children.Clear();
for (int i_box = 0; i_box < c_boxes; i_box++)
{
float max_prob = 0.0f;
int label_index = -1;
for (int j_confidence = 4; j_confidence < c_values; j_confidence++)
{
int index = i_box * c_values + j_confidence;
if (results[index] > max_prob)
{
max_prob = results[index];
label_index = j_confidence - 4;
}
}
if (max_prob > confidence_threshold)
{
List<float> bbox = new List<float>();
bbox.Add(results[i_box * c_values + 0]);
bbox.Add(results[i_box * c_values + 1]);
bbox.Add(results[i_box * c_values + 2]);
bbox.Add(results[i_box * c_values + 3]);
detections.Add(new DetectionResult()
{
label = _labels[label_index],
bbox = bbox,
prob = max_prob
});
}
}
return detections;
}
- Lägg till följande metod för att rita rutorna runt de objekt som identifierats i ramen.
private async Task DrawBoxes(float[] results, VideoFrame frame)
{
List<DetectionResult> detections = ParseResult(results);
Comparer cp = new Comparer();
detections.Sort(cp);
IReadOnlyList<DetectionResult> final_detetions = NMS(detections);
for (int i=0; i < final_detetions.Count; ++i)
{
int top = (int)(final_detetions[i].bbox[0] * WebCam.Height);
int left = (int)(final_detetions[i].bbox[1] * WebCam.Width);
int bottom = (int)(final_detetions[i].bbox[2] * WebCam.Height);
int right = (int)(final_detetions[i].bbox[3] * WebCam.Width);
var brush = new ImageBrush();
var bitmap_source = new SoftwareBitmapSource();
await bitmap_source.SetBitmapAsync(frame.SoftwareBitmap);
brush.ImageSource = bitmap_source;
// brush.Stretch = Stretch.Fill;
this.OverlayCanvas.Background = brush;
var r = new Rectangle();
r.Tag = i;
r.Width = right - left;
r.Height = bottom - top;
r.Fill = this._fill_brush;
r.Stroke = this._line_brush;
r.StrokeThickness = this._line_thickness;
r.Margin = new Thickness(left, top, 0, 0);
this.OverlayCanvas.Children.Add(r);
// Default configuration for border
// Render text label
var border = new Border();
var backgroundColorBrush = new SolidColorBrush(Colors.Black);
var foregroundColorBrush = new SolidColorBrush(Colors.SpringGreen);
var textBlock = new TextBlock();
textBlock.Foreground = foregroundColorBrush;
textBlock.FontSize = 18;
textBlock.Text = final_detetions[i].label;
// Hide
textBlock.Visibility = Visibility.Collapsed;
border.Background = backgroundColorBrush;
border.Child = textBlock;
Canvas.SetLeft(border, final_detetions[i].bbox[1] * 416 + 2);
Canvas.SetTop(border, final_detetions[i].bbox[0] * 416 + 2);
textBlock.Visibility = Visibility.Visible;
// Add to canvas
this.OverlayCanvas.Children.Add(border);
}
}
- Nu när vi har hanterat den nödvändiga infrastrukturen är det dags att införliva själva utvärderingen. Den här metoden utvärderar modellen mot den aktuella ramen för att identifiera objekt.
private async Task<List<float>> EvaluateFrame(VideoFrame frame)
{
_binding.Clear();
_binding.Bind("input_1:0", frame);
var results = await _session.EvaluateAsync(_binding, "");
Debug.Print("output done\n");
TensorFloat result = results.Outputs["Identity:0"] as TensorFloat;
var shape = result.Shape;
var data = result.GetAsVectorView();
return data.ToList<float>();
}
- Vår app måste börja på något sätt. Lägg till en metod som börjar webbkameraströmmen och modellutvärderingen när användaren trycker på
Goknappen.
private void button_go_Click(object sender, RoutedEventArgs e)
{
InitModelAsync();
InitCameraAsync();
}
- Lägg till en metod för att anropa Windows ML-API:er för att utvärdera modellen. Först läses modellen in från lagringen och sedan skapas en session och binds till minnet.
private async Task InitModelAsync()
{
var model_file = await StorageFile.GetFileFromApplicationUriAsync(new Uri("ms-appx:///Assets//Yolo.onnx"));
_model = await LearningModel.LoadFromStorageFileAsync(model_file);
var device = new LearningModelDevice(LearningModelDeviceKind.Cpu);
_session = new LearningModelSession(_model, device);
_binding = new LearningModelBinding(_session);
}
Starta programmet
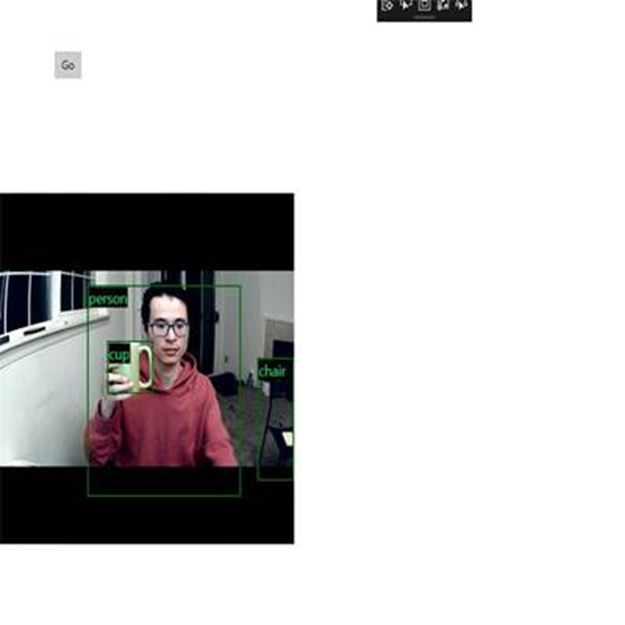
Nu har du skapat ett program för objektidentifiering i realtid!
Run Välj knappen i det övre fältet i Visual Studio för att starta appen. Appen bör se ut så här.
Ytterligare resurser
Mer information om ämnen som nämns i den här självstudien finns i följande resurser:
- Windows ML-verktyg: Läs mer om verktyg som Windows ML-instrumentpanelen, WinMLRunner och mglen Windows ML-kodgeneratorn.
- ONNX-modell: Läs mer om ONNX-formatet.
- Prestanda och minne för Windows ML: Läs mer om hur du hanterar appprestanda med Windows ML.
- Referens för Windows Machine Learning API: Läs mer om tre områden i Windows ML-API:er.