Azure Kinect DK 硬件规格
本文详细说明 Azure Kinect 硬件如何将 Microsoft 的最新传感器技术集成到单个已连接 USB 的附件。
术语
整篇文章使用了以下缩写术语。
- NFOV(窄视场深度模式)
- WFOV(宽视场深度模式)
- FOV(视场)
- FPS(每秒帧数)
- IMU(惯性测量单元)
- FoI(专业范围)
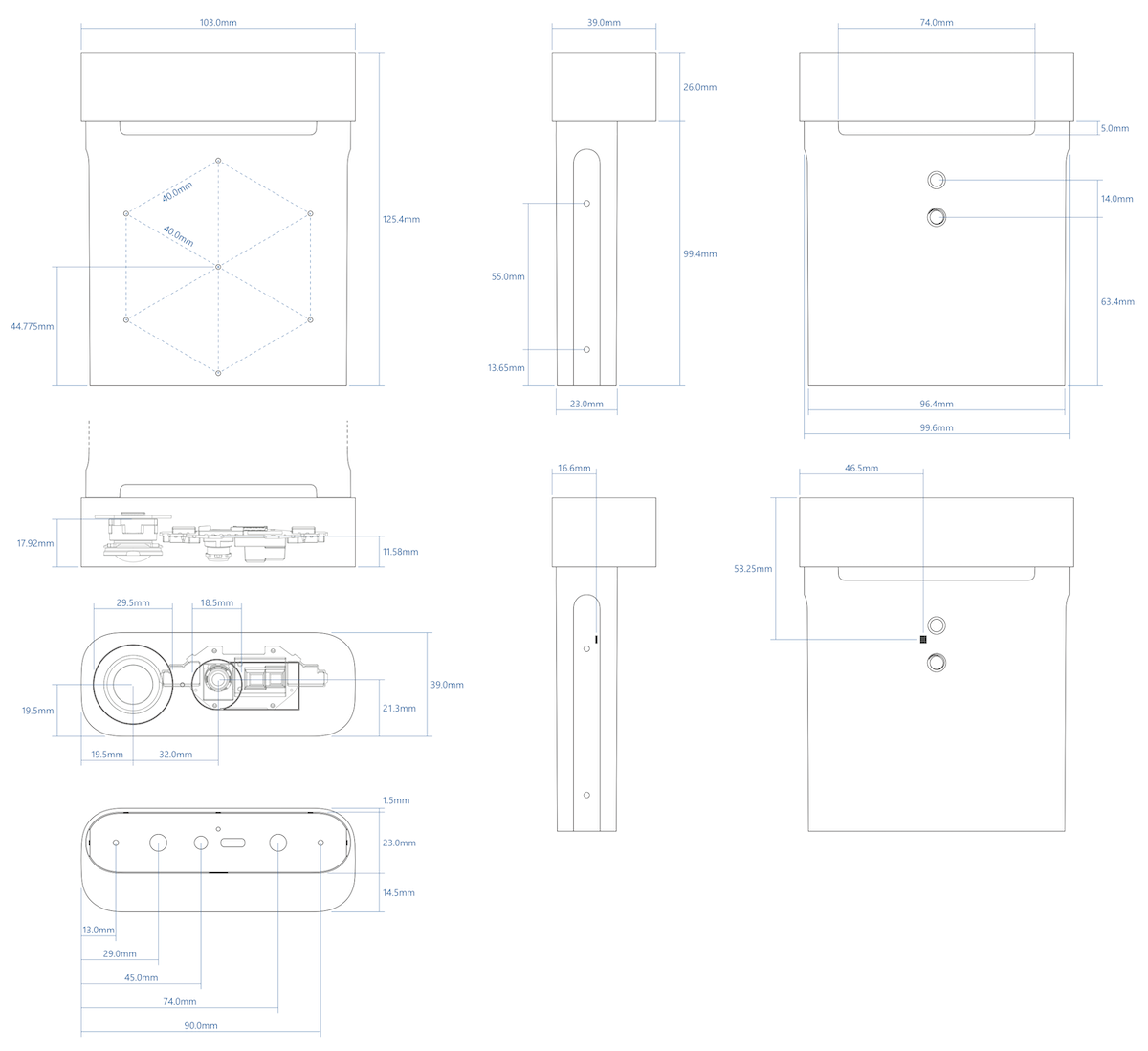
产品尺寸和重量
Azure Kinect 设备的尺寸和重量如下。
- 尺寸:103 x 39 x 126 毫米
- 重量:440 克
此处此处提供了 Azure Kinect 设备的 STEP 文件。
工作环境
Azure Kinect DK 适用于在以下环境条件下工作的开发人员和商业单位:
- 温度:10-250C
- 湿度:8-90%(非冷凝)相对湿度
注意
不符合上述环境条件可能会导致设备出现故障和/或不正常运行。 这些环境条件适用于设备在所有工作条件下运行时的邻近周边环境。 如果配合外部机箱使用,我们建议使用有效的温度控制和/或其他散热解决方案,来确保设备工作条件保持在这些范围内。 本设备在前端型面与后端套管之间设计了一个散热通道。 使用本设备时,请确保不要阻挡此散热通道。
请参阅附加的产品安全信息。
深度相机支持的工作模式
Azure Kinect DK 集成了 Microsoft 设计的 1 兆像素时差测距 (ToF) 深度相机,该相机使用符合 ISSCC 2018 的图像传感器。 深度相机支持如下所述的模式:
| 模式 | 解决方法 | FoI | FPS | 工作范围* | 曝光时间 |
|---|---|---|---|---|---|
| NFOV 非装箱 | 640x576 | 75°x65° | 0、5、15、30 | 0.5 - 3.86 米 | 12.8 毫秒 |
| NFOV 2x2 装箱 (SW) | 320x288 | 75°x65° | 0、5、15、30 | 0.5 - 5.46 米 | 12.8 毫秒 |
| WFOV 2x2 装箱 | 512x512 | 120°x120° | 0、5、15、30 | 0.25 - 2.88 米 | 12.8 毫秒 |
| WFOV 非装箱 | 1024x1024 | 120°x120° | 0、5、15 | 0.25 - 2.21 米 | 20.3 毫秒 |
| 被动 IR | 1024x1024 | 空值 | 0、5、15、30 | 空值 | 1.6 毫秒 |
* 850nm 时 15% 到 95% 的反射率,2.2 μW/cm2/nm,随机误差标准偏差 ≤ 17 mm,典型系统误差 < 11 mm + 0.1% 的距离(无多路径干扰)。 可以在上面指示的操作范围之外提供深度。 这取决于对象的反射率。
彩色相机支持的工作模式
Azure Kinect DK 包含 OV12A10 12MP CMOS 滚动快门传感器。 下面列出了本机工作模式:
| RGB 相机分辨率 (HxV) | 纵横比 | 格式选项 | 帧速率 (FPS) | 额定 FOV (HxV)(处理后) |
|---|---|---|---|---|
| 3840x2160 | 16:9 | MJPEG | 0、5、15、30 | 90°x59° |
| 2560x1440 | 16:9 | MJPEG | 0、5、15、30 | 90°x59° |
| 1920x1080 | 16:9 | MJPEG | 0、5、15、30 | 90°x59° |
| 1280x720 | 16:9 | MJPEG/YUY2/NV12 | 0、5、15、30 | 90°x59° |
| 4096x3072 | 4:3 | MJPEG | 0、5、15 | 90°x74.3° |
| 2048x1536 | 4:3 | MJPEG | 0、5、15、30 | 90°x74.3° |
RGB 相机与 USB 视频类兼容,可以在未安装传感器 SDK 的情况下使用。 RGB 相机颜色空间:BT.601 全范围 [0..255]。 MJPEG 色度子采样 为4:2:2。
注意
传感器 SDK 能够以 BGRA 像素格式提供彩色图像。 这并非设备支持的本机模式,如果使用,会导致 CPU 负载增大。 主机 CPU 用于转换从设备收到的 MJPEG 图像。
RGB 相机曝光时间值
以下是可接受的 RGB 相机手动曝光值的映射:
| exp | 2^exp | 50Hz | 60Hz |
|---|---|---|---|
| -11 | 488 | 500 | 500 |
| -10 | 977 | 1250 | 1250 |
| -9 | 1953 | 2500 | 2500 |
| -8 | 3906 | 10000 | 8330 |
| -7 | 7813 | 20000 | 16670 |
| -6 | 15625 | 30000 | 33330 |
| -5 | 31250 | 40000 | 41670 |
| -4 | 62500 | 50000 | 50000 |
| -3 | 125000 | 60000 | 66670 |
| -2 | 250000 | 80000 | 83330 |
| -1 | 500000 | 100000 | 100000 |
| 0 | 1000000 | 120000 | 116670 |
| 1 | 2000000 | 130000 | 133330 |
深度传感器原始计时
| 深度模式 | 红外 脉冲 |
脉冲 宽度 |
怠 周期 |
空闲时间 | 暴露 时间 |
|---|---|---|---|---|---|
| NFOV 取消绑定 NFOV 2xx Binned WFOV 2x2 装箱 |
9 | 125 微秒 | 8 | 1450 微秒 | 12.8 毫秒 |
| WFOV 非装箱 | 9 | 125 微秒 | 8 | 2390 微秒 | 20.3 毫秒 |
相机视场
下图显示了深度和 RGB 相机视场(传感器“看到”的视角)。 下图显示了 4:3 模式的 RGB 相机。
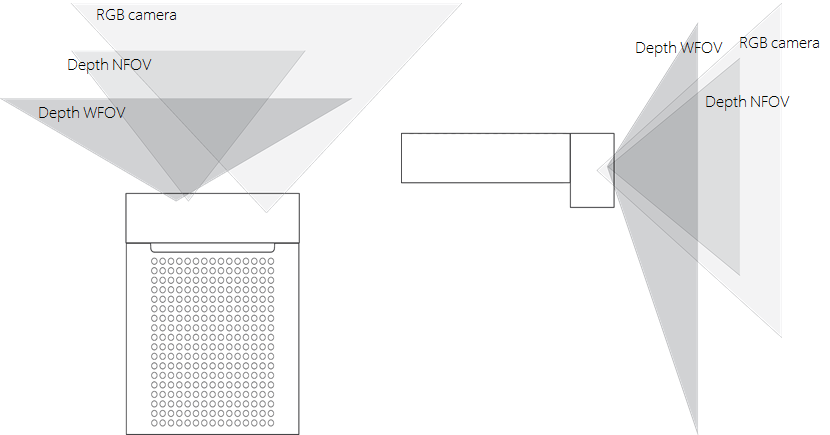
此图显示了相机在正面 2000 mm 距离的视场。
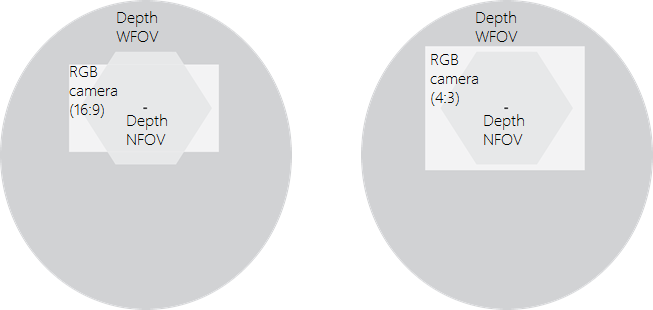
注意
如果深度采用 NFOV 模式,RGB 相机在 4:3 模式下的像素重叠性能优于 16:9 模式。
运动传感器 (IMU)
嵌入式惯性测量单元 (IMU) 为 LSM6DSMUS,包含加速度传感器和陀螺仪。 加速度传感器和陀螺仪同时按 1.6 kHz 采样。 样本以 208 Hz 的频率报告给主机。
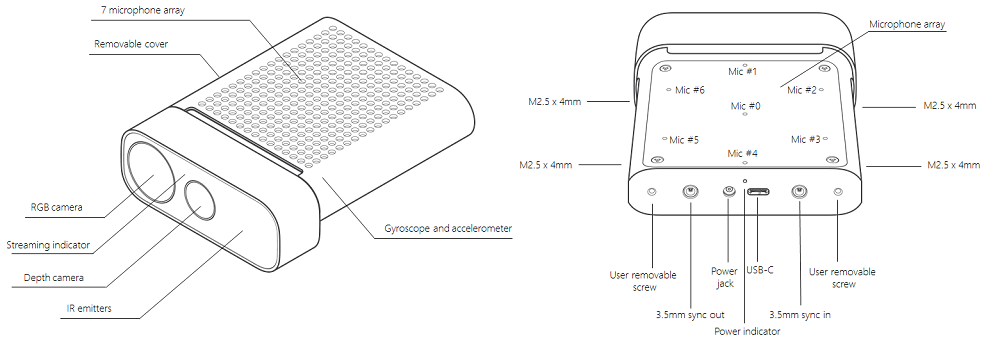
麦克风阵列
Azure Kinect DK 中嵌入了被视为标准 USB 音频类 2.0 设备的优质七麦克风环形阵列。 可以访问所有 7 个通道。 性能规格:
- 灵敏度:-22 dBFS(94 dB SPL,1 kHz)
- 信噪比 > 65 dB
- 声学过载点:116 dB
USB
Azure Kinect DK 是一个 USB3 组合设备,它会向操作系统公开以下硬件终结点:
供应商 ID 为0x045E (Microsoft)。 产品 ID 表如下所示:
| USB 接口 | PNP IP | 说明 |
|---|---|---|
| USB3.1 第 2 代集线器 | 0x097A | 主集线器 |
| USB2.0 集线器 | 0x097B | HS USB |
| 深度相机 | 0x097C | USB3.0 |
| 彩色相机 | 0x097D | USB3.0 |
| 麦克风 | 0x097E | HS USB |
指示灯
设备的正面配备了相机流指示灯,可以使用传感器 SDK 以编程方式将其禁用。
设备背面的状态 LED 指示设备状态:
| 指示灯状态 | 表示 |
|---|---|
| 稳定白色 | 设备已打开并正常工作。 |
| 闪烁白色 | 设备已打开,但未建立 USB 3.0 数据连接。 |
| 闪烁琥珀色 | 设备电量不足,无法正常运行。 |
| 交替闪烁琥珀色和白色 | 正在进行固件更新或恢复 |
设备供电
可通过两种方式为设备供电:
- 使用随附的电源。 电源连接器的外径为 4.5 毫米,内径为 3.0 毫米,引脚直径为 0.6 毫米。
- 使用 Type-C 转 Type-C 线缆供电和传输数据。
Azure Kinect DK 未随附 Type-C 转 Type-C 线缆。
注意
- 随附的电源线是 USB Type-A 转桶形单柱连接器。 使用此线缆时请结合随附的墙上电源。 两个标准 USB Type-A 端口提供的电量并不足以满足本设备的消耗。
- USB 线缆非常重要,我们建议使用优质线缆,并在远程部署本单元之前验证功能。
提示
选择良好的 Type-C 转 Type-C 线缆:
- USB 认证的线缆必须支持供电和数据传输。
- 无源线缆的长度应小于 1.5 米。 如果更长,请使用有源线缆。
- 线缆至少需要能够支持 1.5A 的电流。 否则,需要连接外部电源。
检查线缆:
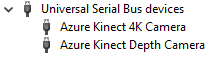
使用线缆将设备连接到主机电脑。
验证所有设备是否在 Windows 设备管理器中正确列出。 深度相机和 RGB 相机应如以下示例中所示列出。
在 Azure Kinect 查看器中使用以下设置,验证线缆是否能够可靠地流式传输所有传感器的数据:
- 深度相机:NFOV 非装箱
- RGB 相机:2160p
- 麦克风和 IMU 已启用
指示灯的含义是什么?
电源指示灯是 Azure Kinect DK 背面的 LED。 该 LED 的颜色根据设备的状态而变化。
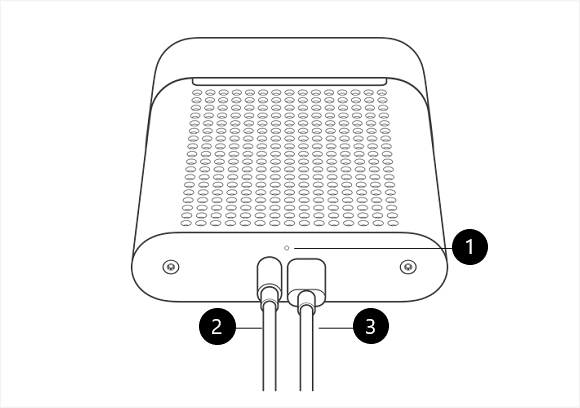
此图标记了以下组件:
- 电源指示灯
- 电源线(连接电源)
- USB-C 数据线(连接电脑)
请确保如图所示连接线缆。 然后,查看下表了解电源指示灯各种状态的含义。
| 指示灯状态: | 含义: | 应该: |
|---|---|---|
| 稳定白色 | 设备已打开电源且在工作正常。 | 使用设备。 |
| 未点亮 | 设备未连接到电脑。 | 确保圆形电源连接器线缆已连接到设备和 USB 电源适配器。 确保将 USB 数据线连接到设备和电脑。 |
| 闪烁白色 | 设备已打开电源,但尚未建立 USB 3.0 数据连接。 | 确保圆形电源连接器线缆已连接到设备和 USB 电源适配器。 确保将 USB-C 数据线连接到设备和电脑上的 USB 3.0 端口。 将设备连接到电脑上的另一个 USB 3.0 端口。 在电脑上打开设备管理器(“启动”>“控制面板”>“设备管理器”),检查电脑上是否装有受支持的 USB 3.0 主机控制器。 |
| 闪烁琥珀色 | 设备电量不足,无法正常运行。 | 确保圆形电源连接器线缆已连接到设备和 USB 电源适配器。 确保将 USB 数据线连接到设备和电脑。 |
| 琥珀色,然后闪烁白色 | 设备已打开电源并正在接收固件更新,或者设备正在还原出厂设置。 | 等待电源指示灯变为稳定白色。 有关详细信息,请参阅重置 Azure Kinect DK。 |
功耗
Azure Kinect DK 的最大功率为 5.9W;具体的功耗与用例相关。
校准
Azure Kinect DK 在出厂之前已校准。 可通过传感器 SDK 以编程方式查询视觉传感器和惯性传感器的校准参数。
设备恢复
可以使用定位销下方的按钮将设备固件重置为原始固件。
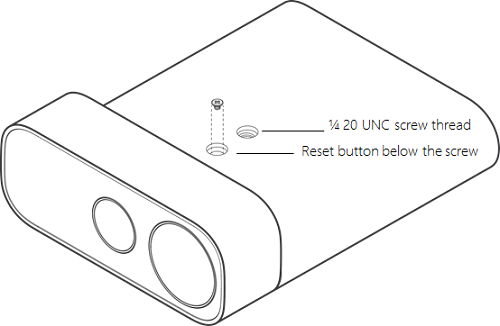
若要恢复设备,请参阅此处的说明。