数学 - 使用控制理论做出可预测的决策
控制技术依赖于对系统的数学理解来确定如何控制它们。 它们使用数学公式来计算下一个控制作,通常基于反馈。 它使用理解良好的数学关系作为模型。 执行此作时,你相信数学公式描述系统动态足以做出良好的决策。
从根本上讲,控制理论中有两种类型的控制循环:
- 打开循环控件
- 闭合循环控制 ,其中包括成比例Integral-Derivative(PID)控件、源转发控件和模型预测控制(MPC)。
1. 打开循环控制
开放循环控制假定系统工作原理的数学模型如此准确且理解良好,不需要反馈。
让我们通过一个示例来解释这一点。 有一个公式描述气体根据温度和压力将占用多少空间。 它被称为理想气体法。 假设你希望系统控制膨胀方气球的阀。 此公式用于计算调整阀打开和关闭以将气球膨胀到特定大小的多少。
这是一个开放循环控制系统,因为该控件基于公式,并且没有反馈告诉你作是否正常工作。
开放循环控制系统易于使用,无法开发。 但是,如果数学公式不适合问题,则它效果不佳。
2. 闭路控制
闭合循环控制使用上一作的反馈。
上述示例的挑战是,理想气体法不为高压或低温气体、密集气体或重气体建模。 因此,大多数控制系统在做出每个控制决策后都会进行反馈。 闭路控制指示需要执行哪些作来调整系统。
现在,我们将了解几种类型的闭合循环控制系统:成比例Integral-Derivative(PID)控制、馈送前移控件和模型预测控制(MPC)。
a。 比例Integral-Derivative (PID) 控件
PID 控件是一种采用反馈的闭循环控制系统。
第一个 PID 控制器是发明的,用于自动引导船轮和控制船的方向。 假设一艘船正指向一个方向,船长想将船指向不同的方向。 控制器使用数学计算根据它从其上一个作中获得的反馈来移动陆路机的多少。
有三个数字确定控制器的行为方式:“P”、“I”和“D”常量。
- “P”常量将你移动到目标,但如果控制器继续转动陆路,船将直接扫过目标标题。
- “I”常量跟踪系统中的总错误量,并使你无法超标目标。
- “D”常量可确保你顺利到达目标目标。
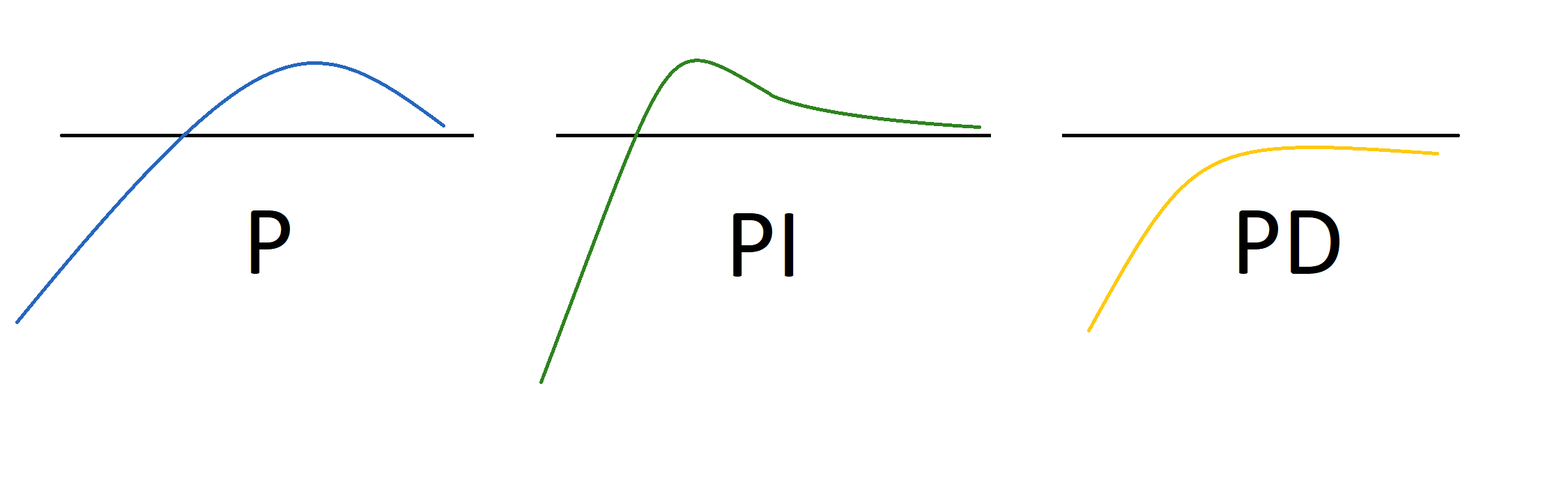
上图显示了打开船轮时 PID 控制器的“P”、“I”和“D”的效果。
PID 优缺点
PID 控制器非常有效,几乎可以在每个现代工厂和机器中找到它,但它可能会使它需要响应的事件混淆干扰和噪音。 例如,如果 PID 控制器控制汽车上的气体踏板,它可能会混淆速度颠簸(这是轻微的和暂时的干扰)的山,需要大量的加速。 在这种情况下,控制器可能会超过加速并超过命令速度,然后需要减慢速度。
b. Feedforward 控件
反馈控制系统处理反馈,并采用多种方式应用数学来计算下一个最佳控制作。 即使我们控制对反馈的响应,数学模型的局限性有时也会导致良好的决策,但也可能导致错误的决策。
源前送增加了更好地识别反馈中的噪音和干扰的能力,并在计算下一个控制作时忽略它们。 这适用于控制计算机和计算机组件,但对于更复杂的系统和进程来说,这可以失败。
源前控制优势和弱点
源转发控制器也被广泛用于行业,并无用。 对于限制,PID 和源前控制器一次只能控制一个变量,每个反馈循环一个目标。 如果需要控制汽车的气体踏板和方向盘,则需要两个反馈/馈送前环。 这两个循环都不能最大化气体里程并同时保持恒定的速度。 与此示例一样,如果需要控制多个变量或追求多个目标,会发生什么情况? 有办法解决这个问题,但在现实生活中,我们经常看到人们创建单独的反馈循环,这些循环无法相互交谈或协调作。 与人类重复工作并错误计算在彼此不协调时该怎么办的方式相同,单独的控制循环不会很好地管理多个目标,而且往往浪费能量。
选项c. 模型预测控制 (MPC)
模型预测控制(或 MPC)扩展了 PID 和 Feedforward 的功能,以控制多个输入和输出。 它使用准确的模型提前尝试各种控制作,然后选择最佳作。 它感知并充当优化算法。
MPC 优势和弱点
MPC 是目前行业中使用的最先进的控制方法。 它准确稳定,就在开发后。
MPC 有三个主要限制:
MPC 的第一个限制是它高度依赖于系统模型的准确性。 通常,系统在开发后准确,但其准确性随着机器或系统的磨损而随时间推移而下降。 例如,如果汽车的刹车已磨损,则需要提前应用刹车来及时停止,或者轮胎磨损时,你不能驾驶得那么快或转得那么快,而不会失去控制。 实时系统更改使系统模型随时间推移不准确。 由于 MPC 使用系统模型来查找并尝试潜在作,因此过时的模型会误导它来选择在当前系统上效果不佳的作。 因此,安装了许多 MPC 系统,然后在系统从系统模型偏移时停用。
第二个限制是开发机器或流程的准确模型的成本很高,因此它们不会在行业广泛传播。
第三个限制是,由于基础优化算法的处理时间,获得下一个最佳决策非常耗时。 对于实时问题,有时我们没有那么多的时间决定,因此选择的决定不是最佳的,这有潜在的巨大的业务影响。